FlexRay总线调研报告.docx
《FlexRay总线调研报告.docx》由会员分享,可在线阅读,更多相关《FlexRay总线调研报告.docx(22页珍藏版)》请在冰豆网上搜索。
FlexRay总线调研报告
FlexRay总线调研报告
FlexRay总线调研报告
汽车电子已成为汽车行业的一个重要市场。
汽车电子行业最大的热点就是网络化[1]。
如今的汽车,已然是一个移动式的信息装置,经过车内网络系统,能够接收、发送并处理大量的数据,对某些状况做出必要的反应。
未来汽车的发展趋势必然是自动化程度越来越高,使汽车更安全、更可靠、更舒适,这意味着在车内使用更多的传感器、传动装置及电子控制单元,这也将对车载网络提出更高的要求。
针对未来汽车车载网络的发展要求,FlexRay应运而生。
FlexRay关注的是当今汽车行业的一些核心需求,包括更快的数据速率,更灵活的数据通信,更全面的拓扑选择和容错运算等。
FlexRay的出现,弥补了既有总线协议应用在汽车线控系统或者同安全相关的系统时容错性和传输速率太低的不足,并将逐步取代CAN总线成为新一代的汽车总线[2]。
1FlexRay总线介绍
1.1车载网络概述
现代科技推动了汽车网络技术的不断发展,早在20世纪80年代国际上众多知名汽车公司就积极致力于汽车网络技术的研究及应用,迄今为止,已有多种网络标准。
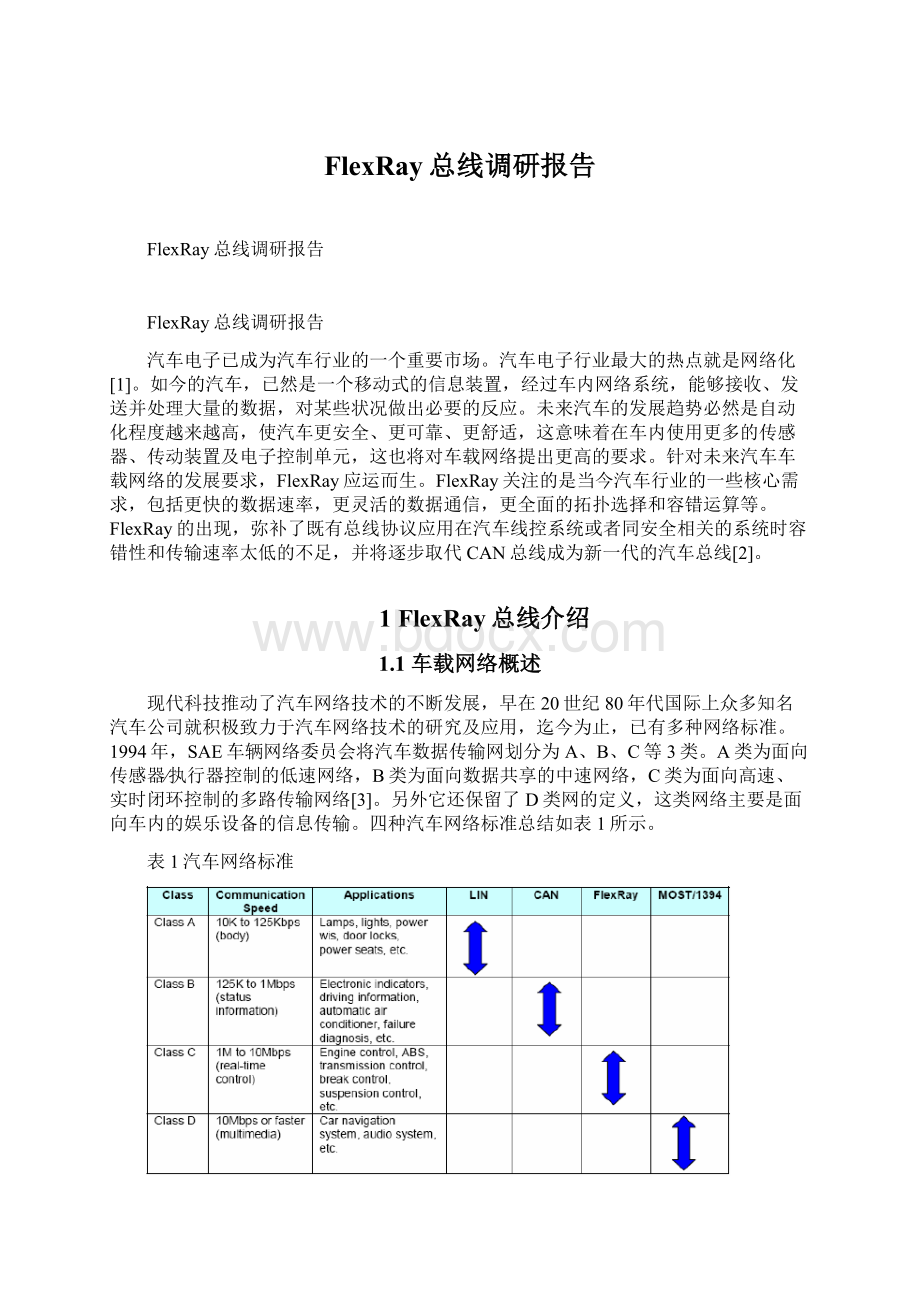
1994年,SAE车辆网络委员会将汽车数据传输网划分为A、B、C等3类。
A类为面向传感器∕执行器控制的低速网络,B类为面向数据共享的中速网络,C类为面向高速、实时闭环控制的多路传输网络[3]。
另外它还保留了D类网的定义,这类网络主要是面向车内的娱乐设备的信息传输。
四种汽车网络标准总结如表1所示。
表1汽车网络标准
A类网络主要面向传感器、执行器控制,是低速网络。
在该类网络中对实时性要求不高,且不需要诊断功能,数据速率一般在1~10Kbps,主要应用于电动门窗、座椅调节、灯光照明等控制。
当前A类网络协议主要有TTP/A(Time-TriggeredProtocol)、LIN(LocalInterconnectNetwork)等协议。
B类网络主要面向独立模块间的数据共享,是中速网络,该类网络适用于对实时性要求不高的通信场合,数据速率一般在10~100Kbps,主要应用于电子车辆信心中心、故障诊断、仪表显示、安全气囊等系统,以减少冗余的传感器和其它电子部件。
在B类网络中,具有代表性的有SAEJ1850、VAN(VehicleAreaNetwork)、CAN(ISO11595-2,不高于125Kbps)等协议。
其中,CAN凭其优越的性能,当前已经成为被全世界接受的主流协议。
C类网络主要面向高速、实时闭环控制的多路传输网,该类网络适用于与安全性相关的实时系统,如发动机定时、燃油供给等系统,数据速率一般在125kbps~1Mbps之间。
当前,C类网络中的主要协议包括高速CAN(ISO118982)、正在发展中的TTP/C和FlexRay等协议。
其中高速CAN基于优先级的随机访问方式,总线传输速率一般在125kbps~1Mbps之间而其它几种协议基于TDMA(TimeDivisionMultipleAccess)或FTDMA(FlexibleTimeDivisionMultipleAccess)的确定性访问方式,数据传输具有确定的延迟时间,且有很高的传输速率(1~10Mbps)。
D类网络主要面向汽车信息娱乐和远程信息设备,特别是汽车导航系统,需要功能强大的操作系统和连接能力。
在D类网络中,具有代表性的有MOST、IDBC、IDB1394、D2B、蓝牙等协议[4]。
1.2FlexRay的产生及发展
随着汽车中增强安全和舒适体验的功能越来越多,实现这些功能的传感器、传输装置、电子控制单元(ECU)的数量也在持续上升。
如今高端汽车有100多个ECU,如果不采用新架构,该数字可能还会增长,ECU操作和众多车用总线之间的协调配合日益复杂,严重阻碍线控技术(X-by-wire,即利用重量轻、效率高、更简单且具有容错功能的电气/电子系统取代笨重的机械/液压部分)的发展。
即使能够解决复杂性问题,传统的车用总线也缺乏线控所必须的确定性和容错功能,例如,与安全有关的信息传递要求绝正确实时,这类高优先级的信息必须在指定的时间内传输到位,如刹车,从刹车踏板踩下到刹车起作用的信息传递要求立即正确地传输不允许任何不确定因素。
同时,汽车网络中不断增加的通信总线传输数据量,要求通信总线有较高的带宽和数据传输率。
当前广泛应用的车载总线技术CAN,LIN等由于缺少同步性,确定性及容错性等并不能满足未来汽车应用的要求。
宝马和戴姆勒克莱斯勒很早就意识到了,传统的解决方案并不能满足汽车行业未来的需要,更不能满足汽车线控系统(X-by-Wire)的要求。
于是在的9月,宝马和戴姆勒克莱斯勒联合飞利浦和摩托罗拉成立了FlexRay的联盟。
由于FlexRay的优秀特性和广大的发展前景,又有很多的汽车,半导体和电子系统的生产商陆续加入了FlexRay联盟,为联盟的壮大注入更强的活力,并使FlexRay通信系统很快获得了动力。
当前,FlexRay联盟包括了汽车工业中绝大多数实力强劲而且影响力极强的角色,包括博世,通用汽车,福特等等。
FlexRay成员分为四个等级,分别是核心成员国,重要联系成员国,联系成员国和最外层的开发成员国。
其中核心成员包括宝马,戴姆勒克莱斯勒,通用汽车,大众,博世,飞思卡尔和飞利浦。
该联盟致力于推广FlexRay通信系统在全球的采用,使其成为高级动力总成、底盘、线控系统的标准协议。
其具体任务为制定FlexRay需求定义、开发FlexRay协议、定义数据链路层、提供支持FlexRay的控制器、开发FlexRay物理层规范并实现基础解决方案。
由FlexRay联盟制定的FlexRay协议标准给出了汽车工业总线更为理想的解决方案,当前,FlexRay协议已经得到业界各大汽车生产厂家以及汽车半导体公司的支持,成为下一代车用网络标准。
经过几年的测试与修改,FlexRay协议2.1版本已经发布。
1.3FlexRay的特性
在FlexRay协计设时,该联盟就规定其三大主要目标特性为:
(1)高速:
比当前其它车用主干网高出数倍;
(2)确定的传输:
以便有效的应用简化的分布式控制算法;
(3)高容错的通信:
以便实施更高安全需要的控制机制或以电控系统替代液压系。
为了能实现这些既定目标,FlexRay协议设计了一些新特性,正是这些优势技术使FlexRay成为下一代车用通信网络的首选。
FlexRay提供了传统车内通信协议不具备的大量特性[6],包括:
(1)高传输速率:
FlexRay的每个信道具有10Mbps带宽。
由于它不但能够像CAN和LIN网络这样的单信道系统一般运行,而且还能够作为一个双信道系统运行,因此能够达到20Mbps的最大传输速率,是当前CAN最高运行速率的20倍。
(2)同步时基:
FlexRay中使用的访问方法是基于同步时基的。
该时基经过协议自动建立和同步,并提供给应用。
时基的精确度介于0.5μs和10μs之间(一般为1~2μs)。
(3)确定性:
通信是在不断循环的周期中进行的,特定消息在通信周期中拥有固定位置,因此接收器已经提前知道了消息到达的时间。
到达时间的临时偏差幅度会非常小,并能得到保证。
(4)高容错:
强大的错误检测性能和容错功能是FlexRay设计时考虑的重要方面。
FlexRay总线使用循环冗余校验CRC(Cyclicredundancycheek)来检验通信中的差错。
FlexRay总线经过双通道通信,能够提供冗余功能,而且使用星型拓扑可完全解决容错问题,如果出现意外情况,星型的支路能够有选择的切断。
(5)灵活性:
在FlexRay协议的开发过程中,关注的主要问题是灵活性。
不但提供消息冗余传输或非冗余传输两种选择,系统还能够进行优化,以提高可用性(静态带宽分配)或吞吐量(动态带宽分配)。
用户还能够扩展系统,而无需调整现有节点中的软件。
同时,还支持总线或星型拓扑。
FlexRay提供了大量配置参数,能够支持对系统进行调整,如通信周期、消息长度等,以满足特定应用的需求。
2FlexRay总线技术原理
2.1帧格式结构
FlexRay帧格式包括帧头段(Headersegment)、有效载荷段(payloadsegment)与帧尾段(Trailersegment)三部分,如图1所示[8]。
节点在网络上传输帧时,首先传输的是帧头段,其次传输的是有效载荷段,最后传输的是帧尾段。
图1FlexRay帧格式
FlexRay帧头段包括5个字节的信息,包括保留位(Reservedbit)、有效载荷段前言指示位(Payloadpreambleindicator)、空帧指示位(Nullframeindicator)、同步帧指示位(Syncframeindicator)、起始帧指示位(Startupframeindicator)、帧ID(FrameID)、有效载荷段长度(Payloadlength)、帧头CRC(HeaderCRC)、周期计数(cyclecount)。
帧ID的范围从1到2047,帧0是无效的帧ID。
在每个通道的一个通信周期内,帧ID仅被使用一次。
一簇中每个可能被传输的帧都赋予了一个帧ID。
ID数字越小,则优先级越高。
有效载荷段长度用来指明有效载荷段的尺寸。
有效载荷段的尺寸被编码为有效载荷段数据字节数值的二分之一(即word的个数)。
在静态时序部分的一个通信周期内,所有发送帧的有效载荷段长度应该是稳定不变的。
在动态时序部分的一个通信周期内,不同帧的有效载荷段长度可能不同。
另外,在不同周期内特殊动态时序部分的帧有效载荷段长度可能变化。
FlexRay有效载荷段包含0~254个字节数据。
在动态时序部分,有效载荷段的前两个字节一般见作信息ID域(MessageIDField),接收节点根据域中的内容去过滤或者引导数据。
在静态时序部分,有效载荷段的前13个字节(数据0~数据12)一般见作网络管理向量,在同一个簇内所有的节点应具有相同长度的网络管理向量。
帧头段的有效载荷前言指示位指明了有效载荷段是网络管理向量还是信息ID。
FlexRay帧尾段只含有24位的校验域,这个域包含了由帧头段与有效载荷段计算得出的CRC校验码。
计算帧CRC时,根据网络传输顺序将从保留位开始,到有效载荷段最后一个字节的最后一位结束,这些数据都放入CRC生成器中进行计算。
2.2编码与解码
FlexRay总线协议独立于底层物理层,有两个不同级的二进制媒介。
这两个不同级媒介所产生的比特流叫做通信要素(CommunicationElement)。
节点使用“不归零”编码的方式对通信要素CE进行编解码。
编码与解码(CodingandDecoding)实际讲述了通信控制器与总线驱动器之间,TxD、RXD和TxEN接口信号的编码与解码行为。
具体结构如图2所示。
图2通信控制器与总线驱动器间接口
图中TxEN是通信控制器请求数据信号,TxD是发送信号,RxD是接收信号。
当总线上有一个传输给本节点的帧时,总线驱动器先把接收到的物理电平信号转变为一个串行信号,然后发送给通信控制器。
当通信控制器有数据要发送到总线时,过程刚好相反。
编码与解码主要包括3个过程:
编码与解码过程、位过滤过程(Bitstrobing)与唤醒模式解码过程(WakeuppatternDecoding)。
这些过程主要涉及到以下三项技术:
位时钟对齐(BitClockAlignment)、采样与多数表决(SamPlingandMajorityVoting)与通道空闲检测(ChannelIdleDetection)。
2.2.1位时钟对齐
位时钟对齐机制是用来同步本地位时钟的。
位同步边缘(BitSynchronizationEdge)是用来对接收器的位时间进行重新对齐的。
除了在对帧头段、帧数据载荷段或帧尾段的字节进行位解码时检测到一个
 升级会员
升级会员 