机电专业课程设计指导书Word文档格式.docx
《机电专业课程设计指导书Word文档格式.docx》由会员分享,可在线阅读,更多相关《机电专业课程设计指导书Word文档格式.docx(9页珍藏版)》请在冰豆网上搜索。
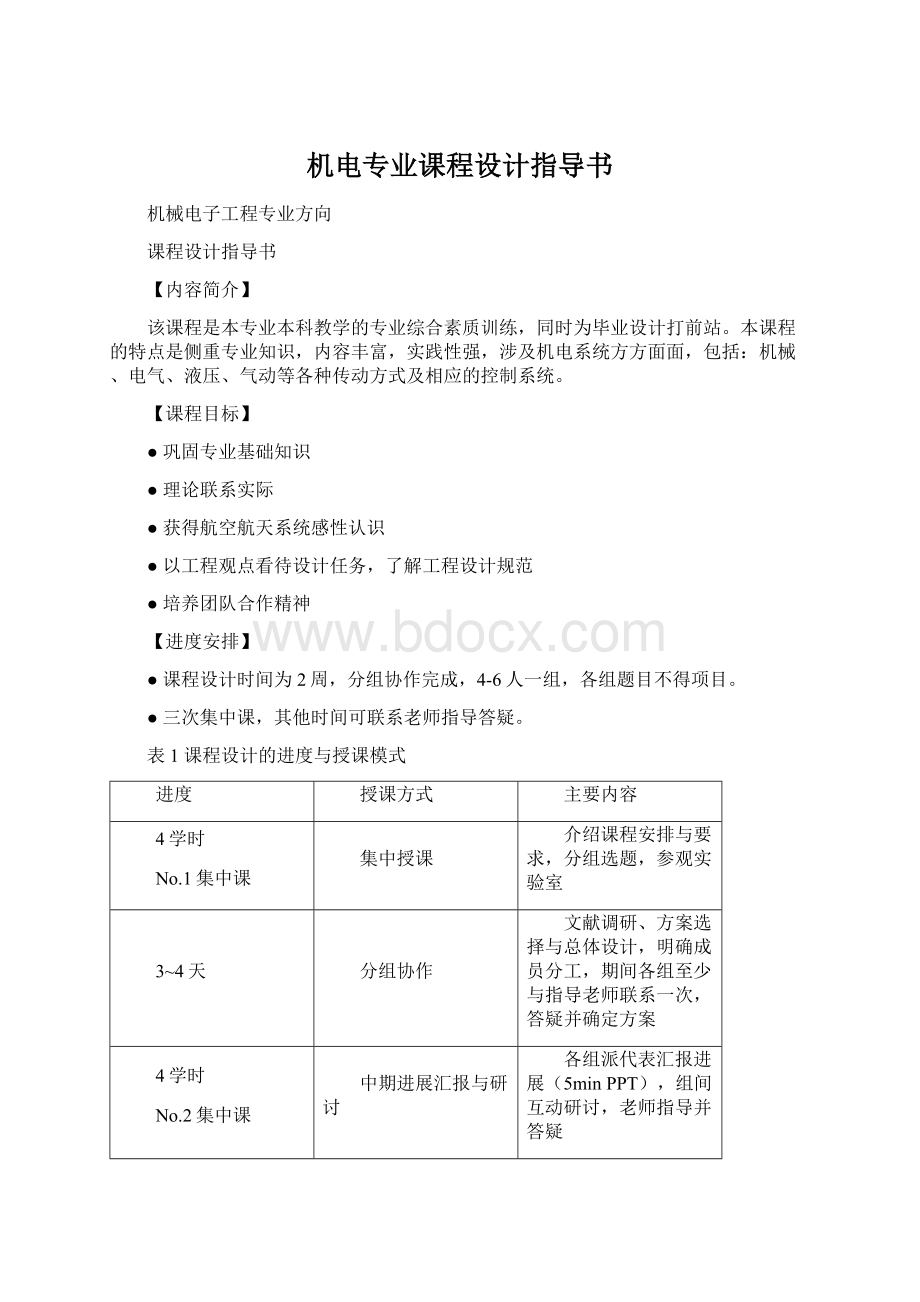
No.1集中课
集中授课
介绍课程安排与要求,分组选题,参观实验室
3~4天
分组协作
文献调研、方案选择与总体设计,明确成员分工,期间各组至少与指导老师联系一次,答疑并确定方案
No.2集中课
中期进展汇报与研讨
各组派代表汇报进展(5minPPT),组间互动研讨,老师指导并答疑
5~6天
理论计算、结构设计与绘图等具体工作。
并撰写任务按成员分工进行。
No.3集中课
集中考核
各组派代表答辩(10minPPT),回答老师和同学提问,课后提交设计报告。
【文档与PPT要求】
●课程设计报告,8000字以上,具体要求见模板。
●中期进展汇报PPT为5分钟,课程答辩PPT为10分钟,具体要求见模板。
【纪律要求】
除本学期未结课程外,全部时间用于本课程,未经批准不可离开北京。
【课设题目】
●单自由度位置摇摆系统
●电惯量模拟系统
●二自由度平面运动位置伺服系统
●液压位置随动力矩加载系统
●稳定回路控制系统
●防滑刹车控制系统
●伺服阀测试台设计
【课设任务书】
题目1单自由度位置摇摆系统
●功能背景:
模拟实现稳定平台的工作环境,即位置与速度的闭环控制,为测试其在此工作环境下的性能指标提供环境参数。
●设计要求
1.总体方案,包括机械结构、传动和控制系统等;
2.机械结构设计,包括机械框架,执行元件、控制元件的安装结构及布置;
3.测控系统,包括数据采集、处理,控制器和传感器等。
4.元件选型:
包括执行元件、测控元件等;
5.部件机械图,如台体等。
●指标
位置精度(角秒)
20
位置分辨率(角秒)
0.36
速率范围(○/S)
0.001-100(旋转)
最大加速度(○/S2)
300
速率精度
0.1%
摇摆功能
频率1-10Hz,幅值1-5度
负载为100Kg,轴对称,圆柱体
●工作量要求
1.系统总体方案,系统原理图;
2.系统机械布置图;
3.元件选型及相关计算;
4.部件机械图。
5.课程设计说明书,8000字左右。
题目2电惯量模拟系统
●功能:
利用电动机转动力矩模拟运动物体的惯量
●设计内容:
总体方案,包括机械结构、传动和控制系统等;
机械结构设计,包括机械框架,执行元件、控制元件的安装结构及布置;
测控系统,包括数据采集、处理,控制器和传感器等。
元件选型:
部件机械图,如台架等。
●指标:
1、运动体的质量为1吨
2、速度为80公里/小时
3、速度降为20公里/小时,用时15秒
4、将直线惯量转为旋转惯量,电模拟200Kgm2
●工作要求
系统总体方案,系统原理图;
系统机械布置图;
元件选型及相关计算;
部件机械图。
课程设计说明书,8000字左右。
题目3二自由度平面运动位置伺服系统
●背景:
运动伺服系统的结构原理示意图:
主要由运动伺服系统物理平台、动力机构、传感器和控制柜四大部分构成。
运动伺服系统物理平台的作用是安装并承载运动伺服机构;
平台的结构布局主要在铅锤平面内,由钢结构绗架和运动伺服机构两大部分组合而成。
1、总体方案,包括机械结构、传动和控制系统等;
2、机械结构设计,包括机械框架,执行元件、控制元件的安装结构及布置;
3、测控系统,包括数据采集、处理,控制器和传感器等。
4、元件选型:
5、部件机械图。
Ø
负载 不大于
行程 水平
;
垂直
Y、Z两轴的垂直度:
最大速度 Y、Z方向
最大加速度 Y、Z方向
位置精度 Y、Z方向
读出精度 Y、Z方向
频响(
)Y、Z方向
1、系统总体方案,系统原理图;
2、系统机械布置图;
3、元件选型及相关计算;
4、部件机械图。
5、课程设计说明书,8000字左右。
题目4液压位置随动加载系统
用于对舵机加载以测试舵机的负载性能。
●设计要求:
实验台总体方案;
实验台机械结构,包括台架,液压元件、传感器的安装结构及油路布置;
试验台测控系统,包括数据采集、数据处理和控制器的总体安排。
包括液压元件和传感器、测控系统元件;
部件机械图,如油路块等。
●技术指标:
最大输出转矩:
9.0kg.m;
输出轴最大转速:
140deg/s;
负载转速:
在3.24kg.m的输出转矩下,舵机的转速应该≥80度/s;
旋转范围:
±
15度;
频带:
≥12Hz。
系统总体方案,系统原理图;
系统机械布置图;
元件选型及相关计算;
部件机械图。
课程设计说明书,8000字左右。
题目5稳定回路控制系统
稳定平台提供了台体相对载体的转动自由度,而平台稳定完成了台体与载体运动的隔离。
稳定回路由角度敏感元件、执行元件、伺服放大器及框架系统本身组成。
●设计:
1、总体方案,包括机械结构、传动和控制系统等;
2、机械结构设计,包括机械框架,执行元件、控制元件的安装结构及布置;
3、测控系统,包括数据采集、处理,控制器和传感器等。
4、元件选型:
5、部件机械图
台体要求:
台体采用立式结构,试验负载安装在台体内框架的法兰安装面上,法兰安装面上具有定位装置。
框架尺寸20cm×
20cm×
20cm
负载要求:
负载的总重量不大于15kg,轴对称;
转动范围:
中框(俯仰)±
150º
(在俯仰轴的-50º
处设一机械限位),外框(方位)±
100°
。
最大角速度:
中框(俯仰)180°
/s、外框150°
/s。
系统稳定精度:
●要求:
题目6防滑刹车控制系统
该系统为一实验台,在其上可进行刹车控制律的研究。
系统要能够模拟刹车系统的各种负载,如飞机的惯量,空气阻力,机轮与地面的接触力,各种摩擦力等。
可采用电液比例、电液伺服刹车系统,也可以采用电动刹车系统。
5、部件机械图,如台架等。
负载为2吨,从90公里/小时到20公里/小时
●工作要求:
题目7伺服阀测试台设计
测试伺服阀,熟悉测试电液伺服阀试验方法
●目标:
完成电液伺服阀和电液比例阀的静态特性和动态特性测试。
其中静态特性包括,电液伺服阀的流量特性(空载流量与输入电流的关系曲线)、压力特性(负载压力对输入电流的关系曲线)、综合特性(不同输入电流情况下负载流量对负载压力的关系曲线)、零位内泄漏特性(内泄漏对输入电流的关系曲线)等;
动态特性包括幅频特性和相频特性等。
1、被测伺服阀最高工作压力21MPa、最大流量40L/min,电流最大不超过50mA,伺服阀幅、相频宽不超过80Hz;
2、环境及温度:
室内常温;
3、介质工作温度:
-20℃~90℃;
●工作要求:
系统电气布置图;
题目7带有力觉反馈的遥操作仿真系统
对于大型工程机械和车辆的遥操作可以让人走出相对危险的环境,操作临场感的实现对操作者作出准确操作决策有很大的帮助,因此带有力觉反馈的遥操作系统在大型机械的操纵与控制领域具有广泛的应用前景。
力觉反馈遥操作系统以工程机械的提吊系统为对象,由操作者远程操纵主操纵杆运动,要求从端提吊系统跟随指令完成起吊重物的操作任务,同时操作者能不失真地感受到起吊装置与环境作用时的交互力,即力觉反馈,通常采用主从方式来实现。
对带有力觉反馈的主从式遥操作仿真平台进行整体方案设计,建立从端起吊系统的数字仿真模型,完成主操纵杆模拟装置的设计、主从端的通信方案和力觉反馈的控制策略,从而建立带有力反馈的遥操作仿真平台。
1、起吊系统最大载重10吨,升降速度不大于3m/s;
2、人手的工作力上限为50N。
部件机械图(操纵杆与安装支架);
力觉反馈的控制策略;
 升级会员
升级会员 