深海工程专题文档格式.docx
《深海工程专题文档格式.docx》由会员分享,可在线阅读,更多相关《深海工程专题文档格式.docx(11页珍藏版)》请在冰豆网上搜索。
张力腿平台的历史、现状和明天
3、张力腿平台的结构形式和特点
4.
MiniTLP之WestSeno
5.
张力腿平台的工作原理及性能
6.
张力腿平台的分类
世界深海采油工程的发展
自1920年委内瑞拉在马开波湖上用木结构平台钻井以来,海上石油资源的开发至今已有80多年的历史。
1947年在美国墨西哥湾建成世界第一座钢结构平台,50多年来海上油气的开发和利用越来越受到世界各国重视。
20世纪60年代,以美国为首的许多西方国家为摆脱能源危机,纷纷投资开发近海石油。
70年代形成近海石油的开发高潮。
当时,30多个国家的近海石油产量达3.76亿吨。
80年代,全世界从事海上油气勘探开发的国家和地区超过100个,其中40多个国家海上石油年产量达6.8亿吨,占陆海石油总产量32亿吨的21%。
2004年海上石油产量约13.15亿吨,占世界石油总产量的34%。
据统计,地球表面积约为5.11亿km2,海洋占70.9%,约占人类生活空间的2/3。
海洋平均深度为3730m,深度为3000~6000m的海域约占海洋总面积的73.8%;
水深小于200m的大陆架仅占海洋总面积的7.49%。
由此可见,人类从深海开发油气是今后长时期发展的必然趋势。
随着海上油气开发逐渐向深海推进,传统的移动平台(如钻井船、半潜式平台)由于在海浪作用下,其运动性能难以满足深水作业的要求而受到挑战。
固定式导管架平台和重力式平台随水深增加其自重和工程造价大幅度上升,因此亦不能适应深海油气开发的需要。
人类从20世纪50年代开始探索深海采油新型平台,顺应式平台(compliantplatform)的概念随之被提出。
经过许多实验和探索,1984年在英国北海建造了世界上第一座张力腿平台(简称TLP)即Hutton平台,它位于水深157m处。
这标志着深水采油张力腿平台技术完全成熟。
事实上,该平台的设计、施工以及建成后实际监测都为以后的张力腿平台的建造提供了丰富的资料。
20世纪以来世界上已建成传统形式的张力腿平台11座,水深从三百米到一千多米,除一座为混凝土材料外,均为钢结构。
其基础形式不仅保留桩基而且还采用了裙式重力基础。
90年代以来,张力腿平台的形式有了很大的改进。
现在已形成三大系列,即SeaStars系列、MOSES系列和ETLP系列。
所谓SeaStarsTLP指的是1992年由Atlantia公司提出的单柱式简易小型平台设计方案,在墨西哥湾已建成4座;
MOSES是MinimumOffshoreSurfaceEquipmentStructure的简称,这种Mini-TLP的概念是由美国海洋工程师协会主席PeterWybro博士提出的。
其主体受波浪力的作用小,改善了平台的运动特性,可在300m到1800m处工作。
这种类型平台在墨西哥湾已建成2座。
ETLP是延伸式张力腿平台(ExtendedTensionLegPlatform)的缩写,目前在西非安哥拉Kizomaba油田建设这样的平台2座。
至今为止,世界上已建和正建的张力腿平台共21座,其中在北海有3座、墨西哥湾有14座、东南亚有2座、西非有2座。
与此同时,另一种深水采油平台Spar平台亦于1987年由EdwardE.Horton设计。
它具有钻探、钻井、完井和采油、储油多种功能,亦可设计成井口平台与浮式生产储油装置(FPSO)配合使用。
1997年世界上第一座Spar平台Neptune建成投产,短短几年中,它的结构产生了一些变化。
人们将2001年提出的桁架式结构形式的平台称为第二代Spar平台或称为TrussSpar平台。
最近,又出现主体采用蜂巢结构形式的平台,称为第三代Spar平台或称为CellSpar平台。
目前这种类型平台世界上已建和在建的共13座。
Spar平台是继张力腿平台之后的第二主力深水采油平台,已经受到人们的普遍青睐。
值得提出的是,在深海油气开发过程中,各种浮式生产储油装置(FPSO)亦在发挥着重要作用。
它与井口平台一起完成海上石油生产任务。
我国海底油气资源丰富,主要集中在渤海、黄海、东海以及南海北部。
大陆架勘探预计石油资源为275.3亿吨,天然气资源为10.6亿m3。
目前发现率仅为18.5%和9.2%,尚具有很大潜力。
2003年,中国海洋石油总公司国内外油气总产量达3336万吨油当量,其中国内产量2601万吨,海外权益产量735.4万吨。
根据有关部门发布的数据表明,2003年海洋石油产量2090万吨,比上年增长4.2%,占全国石油总产量的13%。
2004年海洋石油产量增长至4000万吨。
随着我国国民经济的快速增长,能源需求量越来越大。
因此,我国在加快近海油气开发的同时,向深海采油发展已势在必行。
张力腿平台的结构形式和特点
张力腿平台是一种垂直系泊的顺应式平台,在20多年的实践中不断发展,已形成了一种典型的结构形式。
它一般由五大部分组成,分别是平台上体、立柱(含横撑和斜撑)、下体(沉箱)、张力腿系泊系统和锚固基础。
通常将平台上体、立柱及下体并称为平台本体。
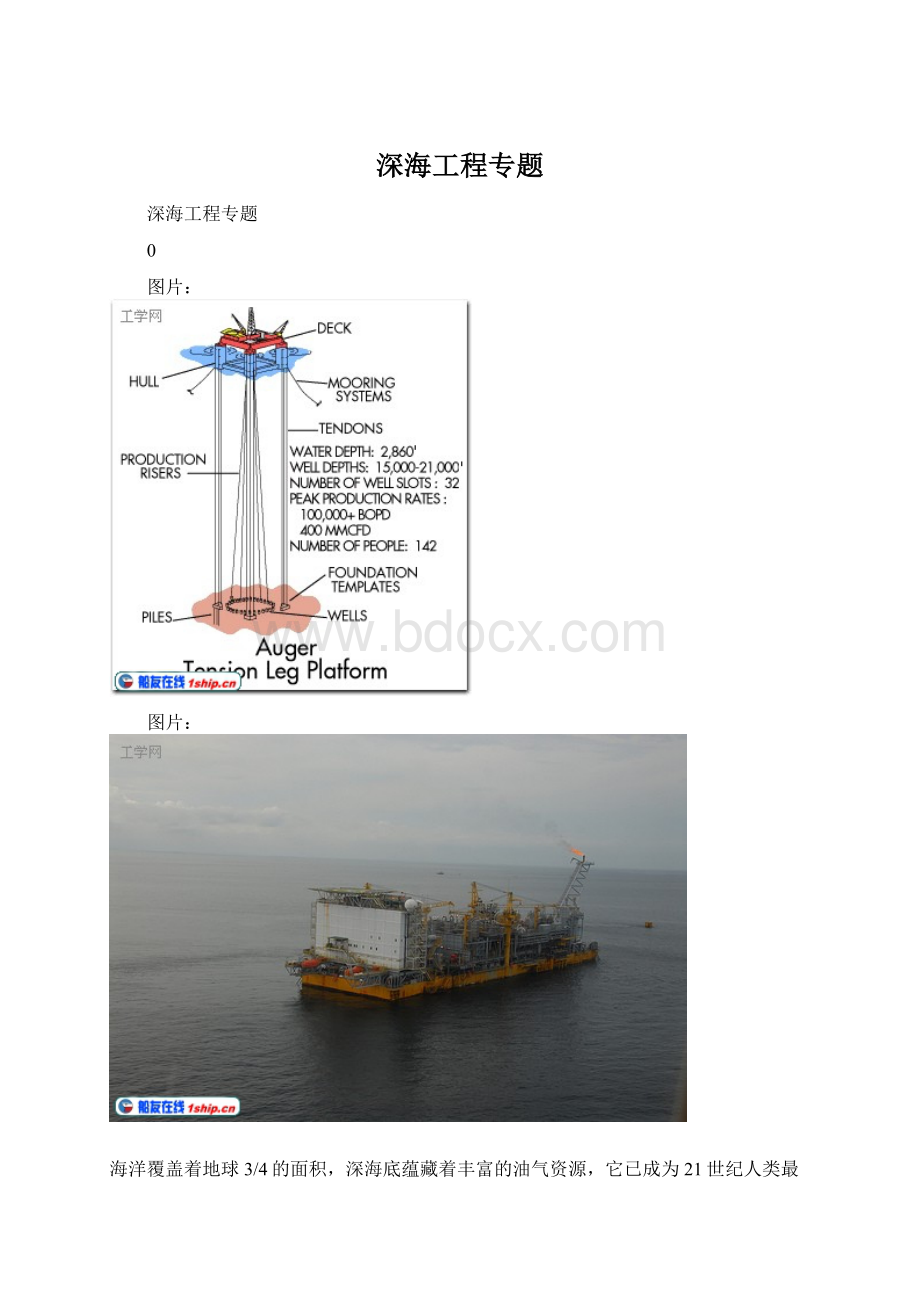
下面,以第一代张力腿平台AugerTensionLegPlatform为例,简要地介绍张力腿平台的总体结构。
图1AugerTLP平台总体示意图
图1是一座第一代张力腿平台的总体结构示意图。
这种张力腿平台的布局俯视一般都呈矩形或三角形,平台上体位于水面以上,通过4根或3根立柱与下体连接,立柱一般为圆柱形结构,是平台波浪力和海流力的主要承受部件,其主要作用是提供给平台本体必要的结构刚度。
平台的浮力由立柱和位于水面以下的下体浮箱提供。
浮箱首尾与各立柱相接,形成环状结构。
由于位于水面以下较深处,所以浮箱受表面波浪力的影响较小。
张力腿与立柱的数量关系一般是一一对应的,每条张力腿由2~4根张力筋腱组成,上端固定在平台本体上,下端与海底基座模板相连,或是直接连接在桩基顶端。
有时候为了增加平台系统的侧向刚度,还会安装侧向系泊索系统,作为垂直张力腿系统的辅助。
海底基础将平台固定入位,主要有桩基或是吸力式基础两种形式。
中央井道位于平台本体的中心,可以支持干树系统,生产立管通过中央井道上与生产设备相接,下与海底油井相接。
从结构特点看,张力腿平台就像一个倒置的钟摆,是一个刚性系统和弹性系统两者综合的复杂非线性动力系统。
张力腿平台的分类
目前世界上在建和在役的张力腿平台共有21座,这些张力腿平台的基本工作原理一致,但是结构形式以及应用方式却各不相同,为了清楚地区分它们,以下从三个方面对这21座张力腿平台进行分类,在以后的文章中将从每类中选出数个平台做详尽的图文介绍。
一、按照总体结构分类
可以分为两个大类,即第一代张力腿平台和第二代张力腿平台;
详见第二页。
二、按照采油树位置不同分类
可以划分为湿树平台和干树平台两大类;
详见第三页。
三、按照功能和应用方式分类
可以分为大载荷张力腿平台、迷你型张力腿平台、井口张力腿平台三大类;
详见第四页。
一、按照总体结构分类
从1984年至今的20年时间里,对张力腿平台结构形式的优化一直是人们关注的热点问题。
为了进一步降低张力腿平台的成本,提高其适应性、稳定性和安全性,全世界的研究机构和石油公司不断提出新形式的张力腿平台,并将其投入实际生产领域进行检验,从而形成了多种多样的张力腿平台家族。
根据张力腿平台结构形式进化的阶段,大致可将它们分为两个大类,即第一代张力腿平台和第二代张力腿平台。
第一代张力腿平台是最早出现的张力腿平台,也是当今世界上数量最多的张力腿平台,目前在役和在建的平台共12座,占世界张力腿平台总数的一半以上,而且仍在不断发展壮大。
第一代张力腿平台的总体结构形式已经在前面介绍过了,在此不再赘述。
为了将它与此后发展起来的其他结构形式的张力腿平台相区别,又将其称为传统类型的张力腿平台。
自1984年以来,传统类型的张力腿平台在生产实践中不断发展,其理论研究和工程应用已经趋于成熟。
20世纪80年代Hutton和Jolliet平台的生产应用,为传统张力腿平台提供了丰富的数据积累和优良的工作记录。
进入90年代以来,传统类型的张力腿平台继续飞速发展,SnorreTLP和HeidrunTLP分别于1992年和1995年相继建成,使北海的张力腿平台数量达到了3座;
从1994年到2001年,Shell石油公司又在墨西哥湾连续制造了5座传统类型的张力腿平台,分别是AugerTLP、MarsTLP、RamPowellTLP、UrsaTLP和BrutusTLP;
1999年,BP也建成了该公司的第一座张力腿平台MalinTLP;
2003年,Unocal公司在印度尼西亚的加里曼丹岛以东海域建成了WestSenoTLP,从而首次将张力腿平台引入到亚洲海域。
这些张力腿平台保持着张力腿平台工作性能的多项世界纪录,其中,HeidrunTLP的排水量达到290310t,是世界现役的张力腿平台中吨位最大的一座;
SnorreTLP日产石油190000桶(1桶=158.9873dm3)、天然气3.2×
106m3,保持张力腿平台生产能力的世界纪录;
而UrsaTLP的工作水深则突破了千米大关,至2004年仍保持着张力腿平台工作水深的世界纪录。
属于第一代张力腿平台的有Hutton、Jolliet、SnorreA、Auger、Heidrun、Mars、Ram、Powell、Ursa、Marlin、Brutus、WestSenoA和WestSenoB。
第二代张力腿平台出现于20世纪90年代初期,它是在第一代张力腿平台的基础上发展起来的。
第二代张力腿平台在继承传统类型张力腿平台优良运动性能和良好经济效益的同时,对结构形式进行了优化改进,使张力腿平台更适合于深海环境,并且降低了建造成本。
世界海洋工程界发展第二代张力腿平台的积极性很高,各大公司纷纷提出了种类繁多的平台设计方案。
总的来说,目前投入生产实践的第二代张力腿平台共分为三大系列,分别是由Atlantia公司设计的SeaStar系列张力腿平台、由MODEC公司设计的MOSES系列张力腿平台以及由ABB公司设计的延伸式张力腿平台(简称ETLP)。
关于这些第二代张力腿平台的结构形式和特点,将在以后的章节中详细介绍。
属于第二代张力腿平台的有:
SeaStar、TLP、MOSESTLP、ETLP、Morpeth、Allegheny、
Typhoon、Matterhorn、Prince、MarcoPolo、KizombaA、KizombaB和Magnolia。
另外,除了以上这些已投入实际生产应用的张力腿平台以外,在过去的20年里,全世界的研究者和工程技术人员还提出了不少很有价值的设计方案,并且围绕这些方案进行了广泛而深入的研究和实验。
虽然由于种种原因,这些平台设计方案至今仍未进入生产领域,但是了解它们,对于开拓人们的思路,更好地进行下一步的研究是大有裨益的。
所以,后面的文章里有选择性地介绍了两种新型的张力腿平台,以期对读者能起到启迪作用。
二、按照采油树位置不同分类
按照采油树安装位置的不同,当今世界上的张力腿平台可以划分为湿树平台和干树平台两大类。
湿树平台(wettreesplatform)的采油树位于海底,平台上安装有独立的全套生产处理设施以支持一定数量的海底油井。
海底油井通过柔性输油管和钢制悬链线立管(简称SCR)与平台上生产设施相连,平台上的全部生产活动都要通过这些管线来进行。
其优点是采油树位于海底,减少了平台上体的负载,不需要建造体积庞大的平台主体,因而降低了平台的总体造价,由于不安装垂直的张紧式立管,因此不需要考虑平台吃水变化对生产立管的影响,从而简化了平台的设计。
湿树平台非常适用于分布面广、出油点分散的油田。
它以柔性输油管和SCR组成分布广泛的海底管线系统,再以湿树平台作为管汇中心,便可以控制较广的区域。
另外,湿树平台的生产储备能力具有很大的弹性,新增的设备和海底油井容易加装到现有的生产系统中,对油田的远期开发比较方便。
已建成的有Hutton、Jolliet、SnorreA、Auger、Heidrun、Mars、Ram/Powell、Ursa、Marlin、Brutus、Prince、KizombaA、Matterhorn、WestSenoA、MarcoPolo、Magnolia、KizombaB和WestSenoB。
干树平台(drytreesplatform)的采油树则位于平台之上,由垂直生产立管直接连接到位于平台井口甲板的采油树上。
张力腿平台优良的运动性能,使其在安装干树系统方面具有很大的优势。
因为平台与生产立管之间的相对运动量较小,因此可以采用结构简单、造价低廉的立管张紧装置。
干树平台的生产活动主要通过顶张紧立管来进行。
其优点是海底油井和表面干树直接通过生产立管垂直连接,可在平台上体安装钻塔,使张力腿平台自行实现钻井、完井功能,避免了远期油田开发中需要调用其他钻井设施而使平台生产中断的问题。
另外,由于采油树位于平台之上,因此维修方便,易于管理,还省去了将海底采油树回接到平台上体的硬件费用。
已建成的有Morpeth、Allegheny和Typhoon。
需要指出的是,世界上现有的张力腿平台大多是所处海域的中心平台,有的张力腿平台除了在平台上体安装有干树系统,能够自行进行探采和控井工作之外,同时还通过柔性输油管和SCR与附近油田的海底采油系统或其他卫星平台相连,作为其石油处理和输出的中心。
在此情况下,这些张力腿平台自身就结合了干树和湿树两种系统。
因此,在对各张力腿平台进行分类时所依据的标准是看该平台是否拥有支持干树系统的能力。
三、按照功能和应用方式分类
目前张力腿平台的功能和应用方式非常灵活,如果以此为标准进行分类,可将世界上21座张力腿平台划分为大载荷张力腿平台、迷你型张力腿平台、井口张力腿平台三大类。
大载荷张力腿平台(largedeckloadTLP)是这三种张力腿平台中历史最悠久的一种类型,它是一种体积巨大、造价昂贵的张力腿平台形式,能够支持一套高生产能力的原油处理设施。
目前全世界共有9座大载荷张力腿平台,其中3座位于北海油田,6座位于墨西哥湾。
因为张力腿的预张力很好地限制8了平台的垂荡运动,因此控井设施可以安装在这种平台的上体,以便于设备的维护和修理工作。
在历史上,这种生产系统之所以得到业界的青睐,主要原因就在于它能够安装干树采油系统。
但是,由于其高昂的造价和对极深水环境的不适应性,人们现在已经逐渐失去了对建造大载荷张力腿平台的兴趣。
当工作水深超过1200m时,张力筋腱自重过大是大载荷张力腿平台最主要的问题。
属于大载荷张力腿平台的是:
Hutton、SnorreA、Auger、Heidrun、Mars、Ram/Powell、Ursa、Marlin和Brutus。
迷你型张力腿平台(Mini-TLP)并不是一种简单缩小化的传统类型张力腿平台,它通过对平台上体、立柱以及张力腿系统进行结构上的改进,从而达到优化各项参数,以更小吨位获得更大有效载荷的目标。
迷你型张力腿平台相对于同等规模的传统类型张力腿平台,具有体积小、造价低、灵活性好、受环境载荷小等优点,非常适合于开发中小油田。
而且与大载荷张力腿平台不同,迷你型张力腿平台能够在极深水环境中稳定地工作,这也是它之所以能够逐渐取代大载荷张力腿平台,占据当今张力腿平台建造主流的最重要的原因。
属于迷你型张力腿平台的有:
Morpeth、Allegheny、Typhoon、Prince、Matterhorn、MarcoPolo和Magnolia
井口张力腿平台(TensionLegWellheadPlatform,简称TLWP)是一种经济型的张力腿平台。
与前两种张力腿平台不同,井口张力腿不能独立进行生产工作,在它的平台上体只安装有控井设施,而其他的石油生产和处理设施都安装在一艘位于平台附近的辅助生产设施上,如FPSO(浮式生产储油装置)等。
TLP和FPSO之间通过管线相接,共同形成一套完整的海上油田开发系统。
这种组合充分发挥了张力腿平台本体与生产立管系统之间相对运动量小、运动性能优良的优点,加之FPSO运动灵活、装载量大、造价相对较低的长处,因此由张力腿平台承担钻探和井口操作的各项功能,而原油处理、储藏和运输等工作由FPSO完成。
这一系统经过实践检验,已被证明是一种有效且经济的海上油气开发方式,十分适合在没有或是缺少海底管线系统和永久性基地,且需要进行钻探、完井和油井维护工作的油田区域使用。
属于井口张力腿平台的有:
Jolliet、KizombaA、WestSenoA、KizombaB和WestSenoB。
张力腿平台的工作原理及性能
张力腿平台设计最主要的思想是使平台半顺应半刚性。
它通过自身的结构形式,产生远大于结构自重的浮力,浮力除了抵消自重之外,剩余部分就称为剩余浮力,这部分剩余浮力与预张力平衡。
预张力作用在张力腿平台的垂直张力腿系统上,使张力腿时刻处于受张拉的绷紧状态。
较大的张力腿预张力使平台平面外的运动(横摇、纵摇和垂荡)较小,近似于刚性。
张力腿将平台和海底固接在一起,为生产提供一个相对平稳安全的工作环境。
另一方面,张力腿平台本体主要是直立浮筒结构,一般浮筒所受波浪力的水平方向分力较垂直方向分力大,因而通过张力腿在平面内的柔性,实现平台平面内的运动(纵荡、横荡和首摇),即为顺应式。
这样,较大的环境载荷能够通过惯性力来平衡,而不需要通过结构内力来平衡。
张力腿平台这样的结构形式使得结构具有良好的运动性能。
张力腿平台的张力腿系统在初始位置是直立的,平台的纵荡运动将不引起纵摇,但一般会和平台的垂向运动相耦合,即纵荡引起垂荡。
在运动过程中没有一个张力腿松弛,它们始终保持等长度平行状态。
如果有任意一个张力腿未校准,则会破坏这种理想的平衡性质。
因此在张力腿平台的设计中,张腿锚固位置容许的偏差量很重要。
同时,设想使用非平行的张力腿,这样的张力腿虽然亦可将平台固定于某一空间位置,但不平行的张力腿必然会在空间相交于一点,这一点将是平台横荡引起首摇的旋转中心。
张力腿平台在张力腿系泊系统张力变化和平台本体浮力变化控制下,平台平面内的运动固有频率低于波浪频率,而平面外的运动固有频率高于波浪频率。
一座典型的张力腿平台,其垂荡运动的固有周期为2~4s,而纵横荡运动的固有周期为100~200s;
横摇、纵摇运动固有周期均低于4s,而首摇的运动固有周期则高于40s。
整个结构的频率跨越在海浪的一阶频率谱两端,从而避免了结构和海浪能量集中的频率发生共振,使平台结构受力合理,动力性能良好。
迄今为止,张力腿平台有着良好的安全记录,这与结构设计上的成功是密不可分的。
一、产生的背景
随着全球人口的增加与当今科学技术的发展,人类生存空间逐步向海洋与空中拓展。
海洋蕴藏着丰富的可供人类从事生产、生活的资源,包括石油资源、动力资源、矿产资源、化工资源、生物资源等,海洋是人类开发的主要领域。
目前,全球对海洋的开发利用已经进入日趋完善和成熟的阶段。
根据统计,21世纪将是一个海洋开发利用空前迅猛发展的时期,这种开发也将是全方位的,从现在人类需求来看,海洋开发利用主要集中在以下几方面:
①海底石油资源的开发利用;
②海底矿物资源的开发利用;
③海水及其所含物质资源的开发利用;
④海洋作为交通、通信通道的利用;
⑤海洋能源(包括波能、潮汐能、温差能等)的开发利用;
⑥海洋空间的开发利用。
无论以什么形式对海洋开发利用,都必须以海洋工程设施为桥梁。
近20年来,随着全球对能源需求量的不断增加,各国对海洋油气的勘探和生产更加重视,从而涌现出大量新型的开采设备及其科学的结构形式和先进的检测维修方法。
世界上第一座近海石油平台于1947年建在墨西哥Couissana海域,平台高出水平面6米。
从此以后,各类海上建筑物陆续出现。
海洋工程设施因开发的内容不同其形式也有很大的不同,而对应每一项开发因完成的功能不同其所用的工程设施也有很多不同的形式。
仅就石油开发而言,就拥有百余种海上工程设施。
目前世界海洋石油平台约有2000座。
海洋石油平台按所用建筑材料可分为钢结构石油平台、混凝土石油平台和钢结构混凝土混合平台,其中大多数海洋石油平台是钢结构形式。
钢结构石油平台由钢套管作为油气生产过程中的主要支撑结构。
按平台结构形式又大致分为钢套管平台、重力式平台、顺应式平台。
海洋工程中选择什么样的平台结构形式主要考虑平台所处的海洋环境,包括风、流、浪等载荷,水深,海底地质条件以及平台的安装和组建方法等。
随着海洋开发愈来愈向深海推进,油气资源的开发也不断进军深海。
一般深海海域中自然环境十分恶劣,环境载荷比较复杂,对海洋工程设施的理论
分析、设计安装等的要求就更加严格和精确。
21世纪初,海上油气开发可望达到水深为2500m以上的所谓极深水海域。
据2000年的统计,在当时世界上近2000座海洋石油平台中,只有65座可以在750m以上深水区作业的半潜式平台和钻井船,其中仅25座能有效地工作在1000m以上的深水区。
可以说,随着深海开发形势的发展,适应深海作业的海洋工程建筑面临着非常严峻的挑战。
由于深水作业的不断增加,各种传统的移动式平台(如半潜式平台和钻井船等),其运动性能和定位难以满足深水作业的要求,而各类固定式平台(如重力式平台和导管架平台等),因自重和工程造价随水深变化而大幅度地增加,也已不能适应深海环境,所以必须发展新型的平台。
从20世纪50年代以来,一些国家不断进行这方面的研究探索,并设计出顺应式平台(compliantplatform)。
在近20年,顺应式平台已得到广泛的发展和应用。
其显著特点是具有特殊的结构形式,从而使工程造价较低,结构安全性良好。
张力腿平台(tensionlegplatform,简称为TLP)就是顺应式平台结构的典型。
二、诞生与发展
1954年,美国的R.O.Marsh率先提出了采用倾斜系泊索群固定的海洋平台方案,被公认为张力腿平台的鼻祖,之后30年是张力腿平台的理论研究
 升级会员
升级会员 