旋转变压器和感应同步器Word文档下载推荐.docx
《旋转变压器和感应同步器Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《旋转变压器和感应同步器Word文档下载推荐.docx(8页珍藏版)》请在冰豆网上搜索。
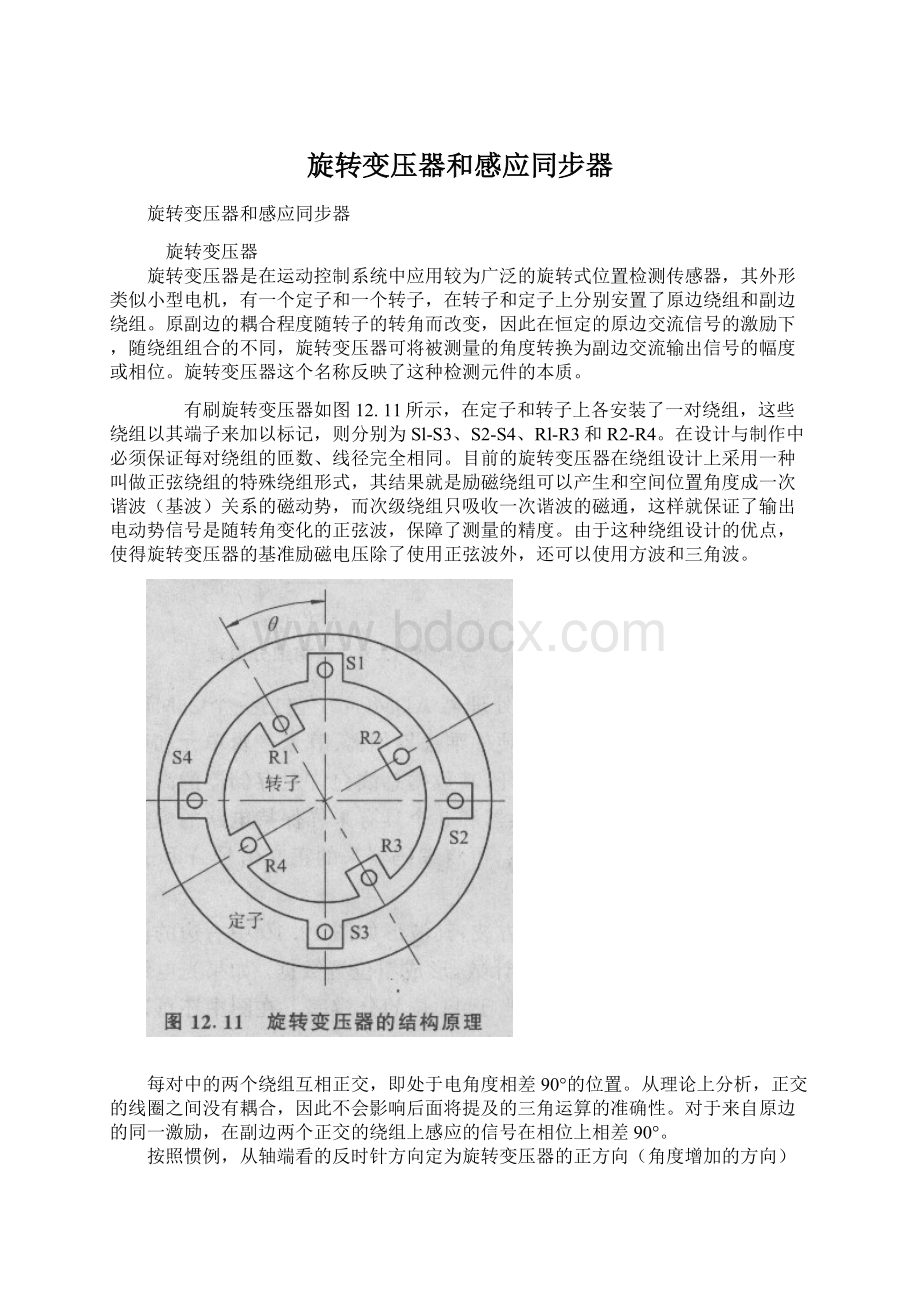
从理论上分析,正交的线圈之间没有耦合,因此不会影响后面将提及的三角运算的准确性。
对于来自原边的同一激励,在副边两个正交的绕组上感应的信号在相位上相差90°
。
按照惯例,从轴端看的反时针方向定为旋转变压器的正方向(角度增加的方向),生产上通常在轴上作一标记并在端盖上作一箭头或圆点来标识零角度。
在不同的自动控制系统中,旋转变压器有多种类型和用途。
图12.12为一种叫做两相励磁角度一相位转换器(或称移相器)的用法。
注意在该示意图中为便于说明问题,将绕组以螺管线圈画法表示,线圈的方向就代表实际绕组的磁场方向。
图中的角度口为转子绕组Rl-R3相对于定子绕组Sl-S3的夹角。
在移相器设计中将两个定子绕组作为原边,分别输入具有相等的频率(如1000Hz)和幅值(例如8.5VRMS),相位差为90。
的两个正弦交流电压,即
u1(t)=Usinωt
u2(t)=Ucosωt
则转子绕组Rl-R3中产生的感应电压为
ur(t)=m[u1(t)cosθ+u2(t)sinθ]=mUsin(ωt十θ)
(12.7)
式中m-转子绕组与定子绕组的有效匝数比,忽略阻抗压降。
转子绕组R2-R4可以不用。
从式(12.7)可以看出,移相器输出电压u,(f)的幅值不随转角口变化,而其相位却与θ相等,因此可以把它看作是一个角度一相位变换器。
这里的相位口可以很容易地用前面介绍过的鉴相细分方法将其转换为数字量。
有刷旋转变压器通过电刷和滑环将转子绕组的激励信号或输出信号引出。
电刷和滑环结构寿命不高,需要维护,终究是造成故障的因素,同时接触导电中产生的火花,也是产生电磁干扰的来源。
因此目前在工业应用中更为广泛的就是无刷旋转变压器。
图12.13为无刷旋转变压器的结构,其中虚线左边是一个普通的旋转变压器,而虚线右边则是一个环形变压器。
环形变压器由外磁环、内磁环、定子绕组和转子绕组组成。
转子和定子绕组均绕制为同心环形,分别嵌入内外磁环。
闭合磁路由内外磁环和它们之间的气隙组成。
环形变压器的转子绕组与左边旋转变压器的转子绕组连接。
无刷旋转变压器的寿命远远超过有刷旋转变压器,而且更为抗震和防污。
无刷旋转变压器的一种典型应用是所谓正余弦旋转变压器。
在环形变压器的原边施加正弦交流电压,耦合到副边形成转子绕组的励磁电压u1(t)=U1sinωt,另一个转子绕组可免除或短接。
在这种结构下,旋转变压器两个定子的输出分别是
u11(t)=kU1sinωtsinθ
u22(t)=kU1sinωtcosθ
式中k为旋转变压器原副边之间的变比。
如果把输入激励电压u,看作一个矢量,旋转变压器将其分解为正交的两个分量u11和u12,这就是旋转变压器的英文名resolver(分解器)的本义。
旋转变压器也可以看作为一个乘法器将输入电压分别乘以转角的正弦和余弦。
如果将这两个信号再接到另一个旋转变压器的定子上,就可以形成角差测量系统或角度跟踪系统。
角差测量系统用于检测给定轴和执行轴的角差,显然系统中需要采用一对旋转变压器。
在图12.14的角差测量系统中称为发送机(transmitter)的旋转变压器A与给定轴相连接,称为接收机(receiver)的旋转变压器B与执行轴相连接。
在下面的分析中请注意图中的角度关系。
在发送机A的转子绕组R2-R4上施加交流励磁电压u1(t)=U1sinωt,另一个绕组短接或接到一定的电阻上起补偿作用。
当A的转角为口时,按照图中的角度关系,两个定子绕组的输出电压与式(12.8)类似,分别是
us1-s3=u1(t)sinα
us2-s4=u1(t)cosα
接收机按两相励磁角度一相位转换器(或称移相器)的用法,如果接收机的转角为p,转子绕组R2-R4的输出应为u2(t)=u'
s1-s3sinβ+u'
s2-s4cosβ
如果将发送机A的输出us1-s3连接到接收机B的定子绕组S2-S4,而us2-S4却连接到B的定子绕组S1-S3,将上式中的U'
S1-S3和U'
S2-S4分别以US2-S4和US1-S3代入可得
u2(t)=u1(t)cosαsinβ+u1(t)sinαcosβ=u1(t)sin(α+β)
如果将接收机B的S1-S3绕组输入的极性对调,则可得到
u2(t)=-u1(t)cosαsinβ+u1(t)sinαcosβ=u1(t)sin(α-β)
这种形式将更有价值,因为这样u2(t)的幅值与两个旋转轴的角度差u2(t)与u1(t)的相位相反,则说明(α-β)是一个负角差。
在上面的推导中忽略了发送机和接收机间的变比k。
在理论上输出电压u2(t)为与u1(t)同频同相的正弦波,不过其幅值为U2=kU1sin(α-β)。
用这个误差信号通过伺服控制器驱动执行轴电动机,使得接收机B的转角等于发送机A的转角,这时接收机B的输出等于零,执行轴也停止转动。
这就形成了一个位置伺服系统,发送机可实现对接收机的遥控,而接收机实现的则是对发送机的遥测。
感应同步器
感应同步器也是一种输出交流信号的位置测量装置。
和光电编码器类似,同样可以有直线和圆盘式结构。
直线式结构如图12.15所示,有两个互相具有电磁耦合的定尺和滑尺组成。
定尺是一个长尺,上面以与制造印制电路板相类似的方法形成类似周期方波波形的绕组,相邻两个波形之间的距离称为节距丁,国产感应同步器的节距一般为2mm。
滑尺上有两个绕组,分别称为正弦绕组和余弦绕组,它们的节距均为丁,但是当正弦绕组与定尺对准时,余弦绕组则与定尺相差T/4,即相差90°
电角度。
定尺一般安装在测量对象的固定部件(如机床的床身)上,而滑尺则安装在运动部件(如机床的刀架)上。
两者隔着0.25mm左右的空气间隙并行放置。
当向两者之一加以正弦信号作为激励时,由于紧密的耦合在其他绕组上就会感应出正弦电压信号来。
如果在滑尺的正弦绕组和余弦绕组上分别施加式(12.6)所表达的相位互差90。
的一组激励,则在定尺上就会得到如式(12.7)表达的信号输出,这一点与旋转变压器相似。
在相对位移为一个节距的范围内,相位差由0。
变化到360。
可以通过测量相位差的方法来得到位置参数。
绝对位置可通过对角度循环的计数和在一个节距范围内的角度来得到。
与旋转变压器转一圈得到360。
角度变化相比较,可以看到感应同步器可进行直线尺寸的直接测量,虽然较为昂贵,但是比较容易得到高的分辨率。
由于没有磨损件,感应同步器的可靠性很高。
如果在定尺上施加正弦激励信号,显然在滑尺的两个绕组上将得到如式(12.8)的与旋转变压器完全相同的输出信号。
感应同步器价格相对较高,但是可以提供非常高的精度,而且由于其没有磨损件而具有很高的可靠性。
旋转变压器和感应同步器的电子电路
通过前面的介绍可知旋转变压器和感应同步器需要提供激励信号才能工作,其输出信号需要经过处理才能得到数据。
因此和光电传感器一样,这两种传感器需要电子线路的配合才能形成完整的测量反馈环节。
幸运的是现代电子技术的发展,尤其是集成电路和微处理器的发展为电子电路的设计提供了很大的便利。
下面介绍在旋转变压器和感应同步器测量环节中应用的专用集成电路及其电路设计。
AD2S99是AD公司生产的可编程正弦波振荡器芯片,主要用于为旋转变压器和感应同步器提供正弦波激励。
这部分电路由频率选择、正弦波发生和推挽驱动等部分组成。
在频率选择部分可通过在SEL1和SEL2上接入不同的逻辑电平在2kHz、5kHz、lokHz和20kHz等4个输出频率中进行选择。
而FBIAS则用于在该引脚与正电源之间接人的阻值来对由SEL1和SEL2确定的频率进行调整。
正弦波发生器产生的正弦波经推挽驱动后可用于对高阻抗的旋转变压器绕组进行激励。
对于感应同步器之类的低阻抗绕组则需要采用放大器增加信号的电流驱动能力。
显然AD2S99适合用于无刷旋转变压器的驱动。
其激励信号送入无刷旋转变压器中环形变压器的原边,感应到副边以驱动转子绕组,从无刷旋转变压器的两个定子绕组得到可由式(12.8)表示的两个正交信号。
将这两个信号分别接入引脚SIN和COS,在SYNREF引脚上就会输出一个同步基准信号,这个信号是与引脚SIN和COS上的信号同步锁定的,在旋转变压器一数字转换器电路中可用作过零基准点。
当引脚SIN和COS上的信号不良或脱落时,AD2S99还可以提供一个信号丢失信号LOS用于故障诊断。
AD2S99的内部功能图如图12.16所示。
AD2S90是一个旋转变压器一数字转换器芯片。
该芯片无须外部器件就可以实现12位分辨率的转换功能。
它可以提供两种格式的数据输出,一种是对增量式光电编码器A、B两路正交信号的模拟,另一种是通过三线接口输出的12位的二进制绝对角度位置串行数据。
此外,AD2S90还可以提供一个转速信号。
AD2S90的内部功能结构如图12.17所示。
以式(12.8)表达的两个正交信号分别由SIN、COS等引脚输入,代表了实际转角曰。
片中计数器的计数值代表了测量的结果,是一个数字表达的角度P。
片中的乘法器实现如下的运算
u=Usinωt(sinθcosψ-cosθsinψ)=Usinωtsin(θ-ψ)
其中(θ-ψ)代表了测量值与实际值之间的角度误差。
AD2S90采用了一种Ⅱ型闭环跟踪原理。
一个相位检测器、积分器和压控振荡器的组合形成了一个闭环系统,其作用就是力图使(θ-ψ)趋向于零,当这一目标实现时,数字化的输出ψ就在容许的误差范围内等于被测的转角θ。
片中的12位二进制计数器提供角度位置的绝对值,这个数值通过由DATA、SCLK和CS组成三线串行口输出。
SCLK信号由外部时钟提供,最高频率可达2MHz。
CS为高电平时,DATA引脚呈现高阻,而CS为低电平时,计数器的数据按照SCLK的节拍串行输出。
AD2S90通过A、B和NM信号输出模拟一个1024线的增量式编码器,即旋转变压器每转一周,A和B产生1024个脉冲。
当角度增加时,B领先于A。
DIR信号在角度增加时为高电平,反之则为低电平。
当角度位置过零时,从NM引脚发出一个零位脉冲信号,这个脉冲信号的宽度可由NMC引脚上的电平控制为90°
、180°
和360°
AD2S90的这种模拟能力使得旋转变压器可取代增量式光电编码器而无须改变现有的应用软件。
VEL引脚输出一个模拟信号代表转速,标定为150rps/V。
这个电压为正的时候表示转角在增大。
以AD2S99和AD2S90组成的一个完整的位置测量系统如图12.18所示。
图中的旋转变压器的转子绕组由AD2S99激励,其定子的输出分别接到AD2S99和AD2S90的相关引脚。
AD2S99的SYNREF输出必须接到AD2S90的REF引脚。
 升级会员
升级会员 