步基马达知Word文档格式.docx
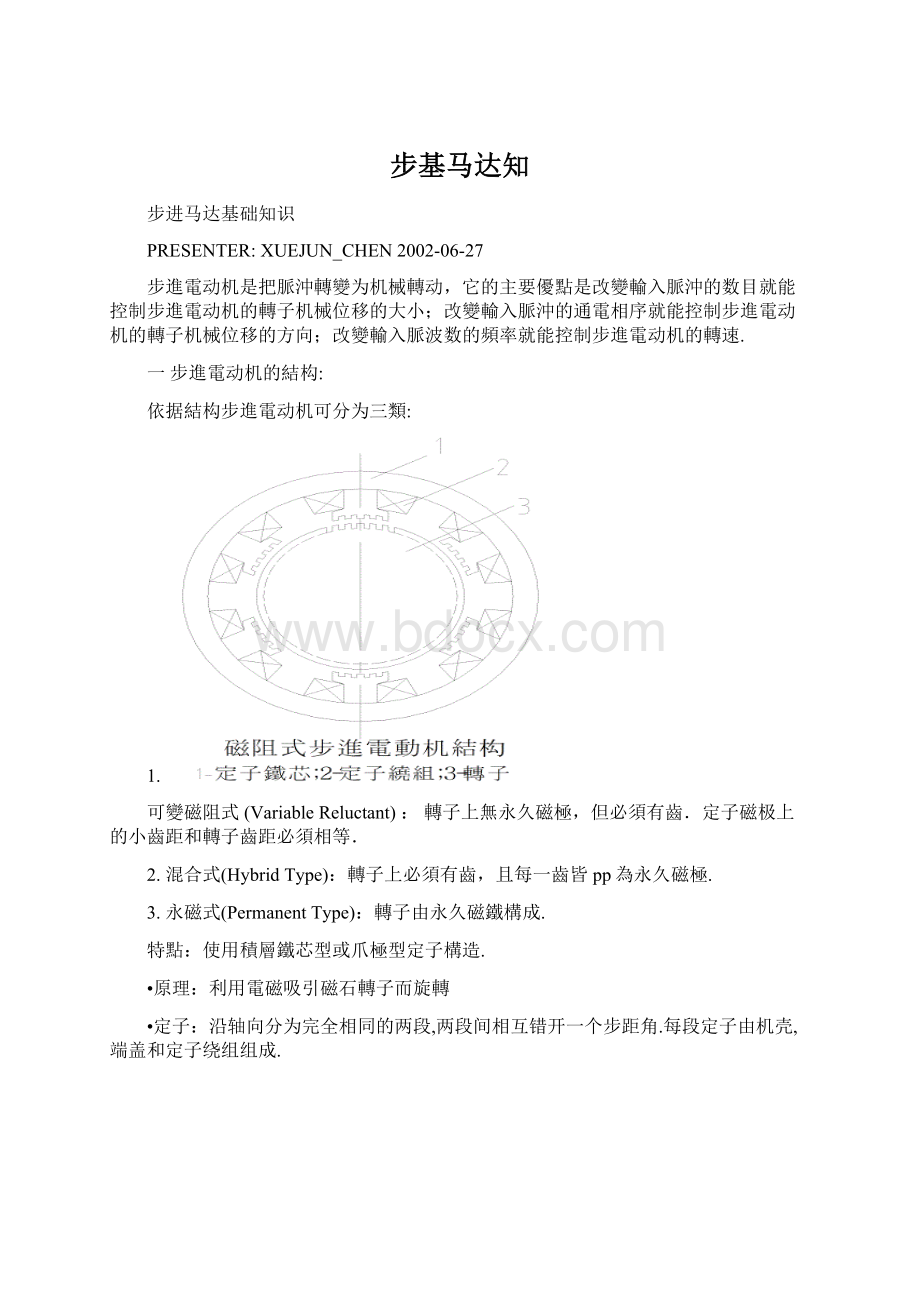
《步基马达知Word文档格式.docx》由会员分享,可在线阅读,更多相关《步基马达知Word文档格式.docx(12页珍藏版)》请在冰豆网上搜索。
•定子:
沿轴向分为完全相同的两段,两段间相互错开一个步距角.每段定子由机壳,端盖和定子绕组组成.
机壳和端盖都由薄钢板精密冲制,内环沿圆周冲有一些爪极磁极片,起机械支撑,导磁和定子磁极的作用.
二.步進電動机的特性:
1.角度──轉矩特性:
•定義─在一相加上額定電流,由外部測定轉矩對角度的關係。
激磁最大靜止轉矩(HoldingTorque):
马达以定格电流激磁,在马达出力轴由外部增加负荷,为了适应外力负荷加入所产生的角度变位,会产生与外部负荷对立的力矩,像这样所产生的最大力矩,称为保持力矩。
外部负荷若在此值以下的情形,当负荷消除时,转子将恢复原来的那个位置。
無激磁保持轉矩(DetentTorque):
在定子無激磁狀態下的保持轉矩。
2步進角度誤差:
以脈波信號使轉子轉動,轉子每一步的轉動角度與步進角(stepangle)的誤差,取最大值,稱為步進角度誤差。
3。
静止角度误差:
•以轉子的任意停止位置為起點,將轉子旋轉一圈,轉子理論上應停止位置與實際停止位置之偏差。
4速度——转矩特性:
激磁最大静止转矩
Pullouttorque
Pullintorque
运转领域
转矩(kg.cm)
自起动领域
最大应答周波数
最大自起动周波数
脉波速度(kpps)
Pull-intorque:
(start-stoptorque)设定在一定脉波速度,马达驱动时所产生的转矩。
Pull-outtorque:
在脉波速度下能正常运转产生的最大转矩。
自起动领域(啟動─靜止區域):
在此區域,馬達可以任意起動、停止及改變轉向而不失步,即能與外部信號同步運轉。
运转领域:
–在此區域,馬達不能任意停止、起動及改變轉向,若欲在此區工作馬達必須先在自起动领域以低速高轉矩運轉以克服靜摩擦,再加速轉入运转领域。
同理,欲停止或換向時,亦須先作減速以回到動止區,再進行停止或換向。
最大自起动周波数–步進馬達能與外部信號同步運轉時之最大脉波速度。
(此時步進馬達為無載)
最大響應頻率
–步進馬達工作在滑動區時之最大脉波速度。
最大啟動轉矩–在10pps時之最大啟動轉矩。
Pull-incurve和pull-outcurve的应用:
控制回路没有加速度和负荷是摩擦力矩时,使用pull-in曲线。
当负荷是惯性惯量和有加速度时,使用pull-out曲线。
步进马达的选择
1.步级角的确定:
马达的步级角是由机械的分辨率确定。
在PRINTER机构中,feedroll分辨率与feedroll 直径及传动比,步级角有一个方程式:
25。
4/N=πD/GR*360/θ
D是feedroll的直径。
(mm)
N是打印分辨率。
θ是马达的步级角。
GR是传动系统的减速比。
在sapphire,QBC的规格中:
300*600resolutioninmonochromeandcolorinquickprintmode.
Thenourmechanicalresolutiontarget=600dpi
那么当GR=70/14*26/14=9.28571
D=12.018mm时,θ=3.75degree.
实际上,我们选择θ=7.5degree.
激磁方式:
二相步進馬達
•一相激磁(全步)
•二相激磁(全步)
•一二相激磁(半步)
一相激磁與兩相激磁:
一二相激磁:
一二相激磁步進角為原來1/2.
另外要了解步进马达的驱动方式:
1.定电压
2.定电流
3.逆向脈波驅動
4.微步进
相對而言,定壓驅動結构簡單,但不适于高速轉動,定流驅動結构复雜,但适于高速轉動,逆向脈波驅動用于改善電動机停止時的震動特性,微步驅動理論上可以得到1/4、1/8、1/12甚至還小的步級驅動.
•微步进原理─在相鄰的兩激磁相流入任意的電流。
并且微步进角等于全步进角除以分割数。
那么,我们选择的DRIVEMETHOD:
1/4MICROSTEPW1-2phaseexcitation.
2.必要转矩的计算:
a.Gearratio的确定:
在QBC机种:
从马达到Feedrollgearratio=17
从马达到AC_TIREgearratio=19.6
在sapphire机种:
从马达到Feedroll和exitroller的gearratio都是9.28571
从马达到AC_TIREgearratio=22.058
b.估算Motor所需之Torque
Tm=n(Ta+Tf)
Tm:
Motor負載轉矩
n:
安全系数
Ta:
慣性轉矩
Tf:
摩擦轉矩
首先,我们计算慣性轉矩。
惯性惯量的公式如下:
Jshaft=1/8*M*D2=1/32*π*ρ*L*D4
慣性惯量:
JRoller=1/8*M*(D12+D22)=1/32*π*ρ*L*(D14-D24)
于是测量:
sapphireAC-tire的质量:
8.5g
sapphireexit-roller的质量:
15.5g
sapphirefeed-roller的质量:
81g
那么,Ja=1/8*0.0085kg*(22+1.32)=0.00569kg*cm2
Jf=1/8*0.081kg*0.72=0.0049kg*cm2
Je=1/8*0.0155*12=0.002kg*cm2
Ja:
InertiaofAc-driverroller
Jf:
InertiaofFeedRoller
Je:
InertiaofExitRoller
(Jg:
Inertiaofallofgears)
Jo:
Inertiaofmotorrotor
因为负荷惯性惯量是以减速比的平方为比例变小。
JL:
传递至馬達端之有效慣性:
JL=Ja/GRa2+Jf/GRf2+Je/GRf2=0.00569/(22.058)2
+0.0049/(9.28571)2+0.002/(9.28571)2
=9.17*10-5kg*cm2
根据FW的加速表可以确定α:
步进马达的起动速度是1/3.33ms=300pps
步进马达的运行速度是1/0.076ms=13158pps
其中马达的加速步数是511steps,加速所需的时间是50ms.
由于Ta=J*α=(JL+Jo)*α=(9.17*10-5+Jo)
那么Ta=(JL+Jo)/g*(π*θ/180)*(f2-f1)/t
=(9.17*10-5+Jo)/g*(π*θ/180)*(13158-300)/0.05
=(9.17*10-5+Jo)/g*0.13*257160
=(9.17*10-5+Jo)/g*33430.8
=34.1(9.17*10-5+Jo)
先不考虑马达转子惯性惯量,那么
Ta=3.13*10-3kg*cm=3.13g*cm
(C)Tf的求法:
(实验法)使用torquegauge
QBC机种:
(实测pickup—shaft)
测量的次数
取A4纸时pickupshaft处的转动力矩(g*cm)
取photo纸时pickupshaft处的转动力矩(g*cm)
Feedroll-tire处的摩擦力矩(g*cm)
1
300
780
200
2
360
760
220
3
320
4
720
5
平均值
332
208
4406机种:
取A4纸时A-Ctire处的摩擦力矩(g*cm)
取photo纸时A-Ctire处的摩擦力矩(g*cm)
260
560
110
280
580
100
240
120
256
564
108
那么在sapphire机种:
620
80
700
640
276
636
104
由于马达需要的torque值是所有的负荷torque除以齿轮组的减速比。
(=loadtorque/GR)
那么sapphire的最大的
Tf=636/22.058+104/9.28571+25/9.28571=42.733g*cm
令安全系數n=2.0
则Tm=2*(42.733+3.13)=91.7g*cm(when13158pps)
然后vendor提供马达,加上马达转子惯性惯量后验证。
 升级会员
升级会员 