ARM实验指导书wjqWord文档格式.docx
《ARM实验指导书wjqWord文档格式.docx》由会员分享,可在线阅读,更多相关《ARM实验指导书wjqWord文档格式.docx(29页珍藏版)》请在冰豆网上搜索。
4、如果出现无法逼使CPU进入调试的提示只需要复位你的板子,重新启动软件即可;
5、如果发现软件没有任何动作把它关了再启动;
6、如果发现软件根本无法运行看不到其运行界面那么执行“安装驱动.exe”,重新驱动OCX即可;
7、如果出现打开并口失败,那么执行安装驱动.exe,重新并口驱动即可;
8、如果提示检测不到ARM核如果你的CPU没坏供电正常那么就一定是你的JTAG板子问题了,应该参考常用的那种"
SDT"
或"
Wiggler"
接线然后在JTAG调试软件选择对应的选项SDT或wiggler或自定义;
9、排除这些如果出现其他的调试错误,那么就是你设置ADW/AXD或你的板子问题了
10、一些常见问题请参考上的BBS;
11、有任何疑问请EMAILsendtoyou@Tang-ZhongGen,调程序
实验二、ADS1.2集成开发环境练习
ARMADS(ARMDeveloperSuiteV1.2)是ARM公司,为开发ARM内核处理机而提供的集成开发环境(IDE)和集成调试环境(ICE)。
本书涉及的实验均以ADS为默认开发、调试环境。
学会ADS集成环境。
正确安装完全版ARMADS1.2集成环境,并了解整个仿真环境的一些设置和工作方法。
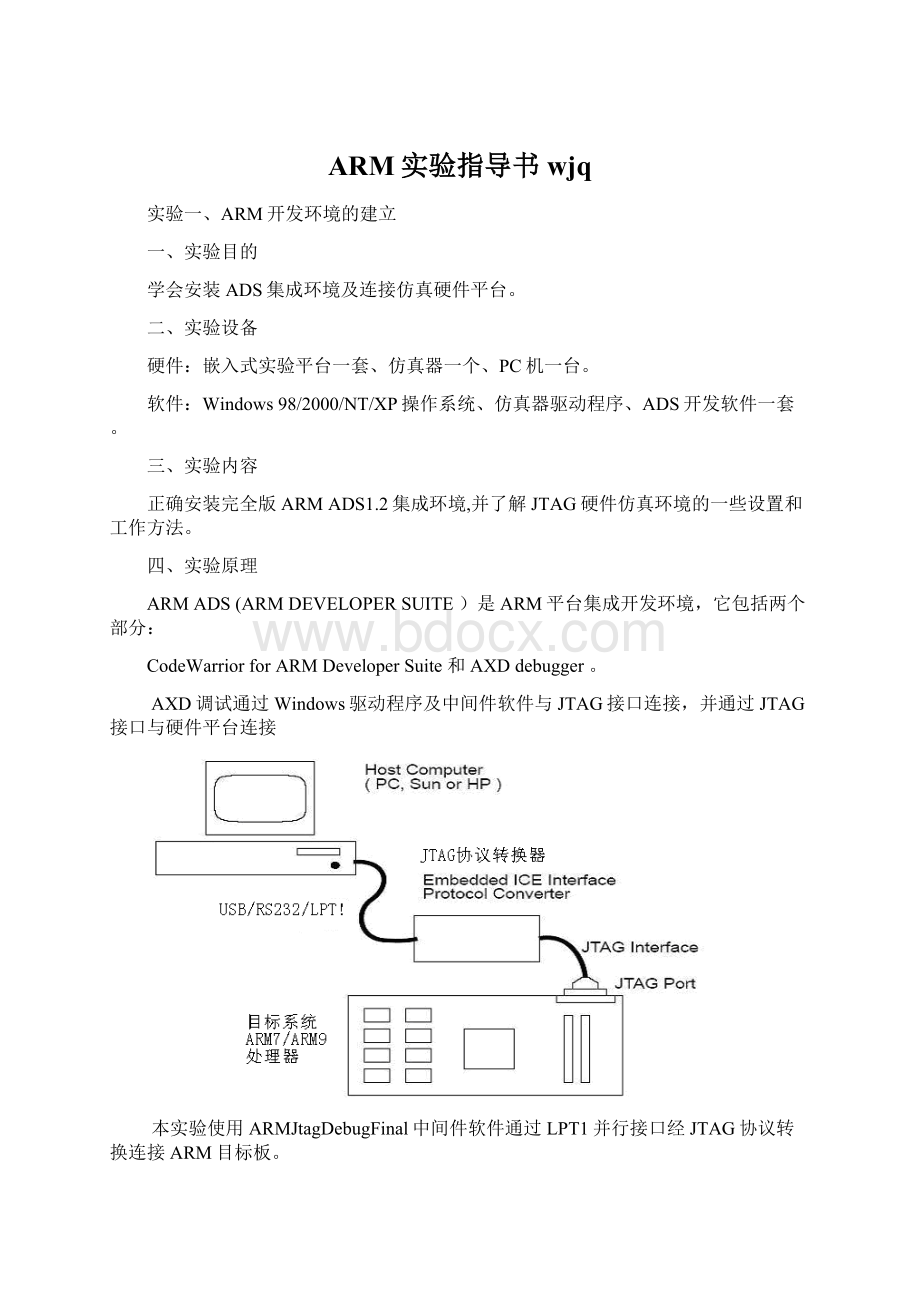
ARMADS(ARMDEVELOPERSUITE)是ARM平台集成开发环境,它包括两个部分,
CodeWarriorforARMDeveloperSuite和AXDdebugger,前者具有编辑,编译,链接等功能并可生成二进制文件(.bin)和可执行的映象文件(.axf)以及各源文件的目标代码(.o);
后者可以装载映象文件或二进制文件到ARM平台,并可实现跟踪调试。
五、实验操作步骤
1.启动CodeWarriorforARMDeveloperSuite(ADS集成开发环境),点击开始菜单/程序/ARMDeveloperSuitev1.2/CodeWarriorforARMDeveloperSuite会出现如下界面:
2.点击【File】菜单中的【NEW】,在打开的菜单中选择PROJECT,在窗口中定义路径、名称以及工程项目的属性(ARMEXECUTABLEIMAGE)然后点击“确定”。
3.生成的项目默认目标有DEBUG(调试版)、RELEASE(发行版)和DEBUGREL(带部分调试信息的发行版)。
在【TARGET】中可以看到,此时的项目是个没有内容的空项目,需要加入文件【FILES】。
4.点击【FILES】后,加入文件的方法有两种,从工具栏PROJECT下拉菜单中选择ADDFILES(CREATEGROUP文件组)或在空白区域内点击鼠标右键弹出菜单,加入FILE(GROUP)。
5.将先前编辑好的文件test.s添加到该项目中来。
6.文件添加完毕之后,可以打开其中的一个或多个文件进行修改和编辑。
与文本编辑相关的操作主要在工具栏【EDIT】菜单中,主要有删除、拷贝、剪切、粘贴、恢复等操作。
查找、替换等需要在多个文件间切换的功能菜单在【SEARCH】工具栏菜单中。
7.修改完毕后保存好新建的项目。
8.根据目标板的具体情况进行一些必要的设置工作。
在CodeWarriorforARMDeveloper
Suite中点击Edit\DebugRelSettings…..按钮。
将Linker\ARMLinker中的ROBase和RWBase值改为目标板的ROM,RAM地址,然后点击OK按钮。
对项目进行完设置后,点击Project\Make按钮或按快捷键F7,对项目文件进行编译。
9.在对项目进行了编译之后如果没有编译错误,就可以进行仿真了。
点击Project\Debug
按钮或按快捷键F5,启动AXD,用仿真器进行仿真。
提示:
本书以后所有演示程序在运行前,均需在DebugRelSettings做以下的设置:
1.ARMLinker设置ROBase为0x0c008000
2.做如下图的设置:
完成以上两步,程序方可正常执行。
六、练习题
1.仿真环境包括哪些内容?
2.仿真手段除了介绍的方式外还有哪些?
3.把平台初始化文件hm.ini中的命令行,逐行解释出来(在AXDcommand窗口下按F1可
得到命令说明)。
实验三、汇编指令实验
掌握ARM7TMDI汇编指令的用法,并能编写简单的汇编程序;
学习ARM微控制器的16位Thumb汇编指令的使用方法掌握指令的条件执行;
Windows98/2000/NT/XP操作系统、仿真器驱动程序、ADS开发软件一套。
分别使用ARM、Thumb指令ADD,MOV,CMP,B计算1+2+3+…+N的值。
ARM处理器共有两种工作状态:
ARM32位,这种状态下执行字对准的ARM指令。
Thumb16位,这种状态下执行半字对准的Thumb指令。
注意:
ARM和Thumb之间状态的切换不影响处理器的模式或寄存器的内容。
ARM处理器在两种工作状态之间可以切换。
(1)进入Thumb状态。
当操作数寄存器的状态位0为1时,执行BX指令进入Thumb状态。
如果处理器在Thumb状态进入异常,则当从异常出来(IRQ、FIQ、Undef、Abort、SWI)返回时,自动切换到Thumb状态。
(2)进入ARM状态。
当操作数寄存器的状态位0为0时,执行BX指令进入ARM状态。
处理器进行异常处理(IRQ、FIQ、Undef、Abort、SWI)。
在此情况下,把PC放入异常模式链接寄存器中。
从异常向量地址开始执行也可以进入ARM状态。
Thumb状态下的寄存器集是ARM状态下寄存器集的子集。
程序员可以直接访问8个通用寄存器(R0-R7)、PC、SP、LR和CPSP。
每一种特权模式都有一组SP、LR和SPSR。
Thumb状态的R0-R7与ARM状态的R0-R7一致。
Thumb状态的CPSR和SPSR与ARM状态下的CPSR和SPSR一致。
Thumb状态的SP映射到ARM状态的R13。
Thumb状态的LR映射到ARM状态的R14。
Thumb状态的PC映射到ARM状态的PC(R15)。
本程序使用R0保存结果,所以一开始就要初始化为0;
循环执行R0=R0+R1,R1为循环计数器,从1开始计数,每一次循环R1加1;
当循环计数器R1的值到达N时,运算结束。
1.启动ADS1.2,使用ARMExecuatableImage工程模板建立一个工程ASM_Project。
2.建立源文件test2.s,编写实验程序,然后添加到工程中(ARM指令和Thumb指令实验的test2.s程序源码分别见下清单)。
3.设置工程链接地址ROBase为0x0C000000
4.编译链接工程,选择【Project】->
【Debug】,启动AXD进行调试。
5.打开寄存器窗口(ProcessorRegisters),选择Current项监视各寄存器的值。
6.单步运行程序,注意执行BXR0指令前后CPSR寄存器的T位。
说明:
在寄存器窗口的CPSR寄存器,大写字母的位表示该位为1,小写字母的位表示
该位为0(比如“T”表示T位为1,“t”表示T位为0)。
7.理解并掌握本实验原理及程序,完成练习题。
六、实验参考程序
Thumb汇编指令实验的参考程序代码清单
;
文件名:
test.s
功能:
计算1+2+3+…+N的值
NEQU50;
定义N的值为50
AREAtestcode,CODE,READONLY;
声明代码段testcode
ENTRY;
标识程序入口
CODE32;
声明32位ARM指令
ARM_CODE
LDRSP,=0x40003F00;
设置堆栈指针
ADRR0,THUMB_CODE+1
BXR0;
跳转并切换处理器状态
LTORG;
声明文字池
CODE16;
声明16位Thumb指令
THUMB_CODE
LDRR0,=N;
设置子程序SUM_N的入口参数
BLSUM_N;
调用子程序SUM_N
BTHUMB_CODE
名称:
SUM_N
入口参数:
R0(N的值)
出口参数:
R0(运算结果)
PUSH{R1-R7,LR};
寄存器入栈保护
MOVSR2,R0;
将N的值复制到R2,并影响条件码标志
BEQSUM_END;
若N的值为0,则返回。
CMPR2,#1
若N的值为1,则返回。
MOVR1,#1;
初始化计算器R1=1
MOVR0,#0;
初始化结果寄存器R0=0
SUM_L1ADDR0,R1;
R0=R0+R1
BCSSUM_ERR;
结果溢出,跳转到SUM_ERR
CMPR1,R2;
将计算器的值与N比较
BHSSUM_END;
若计数器的值≥N,则运算结束
ADDR1,#1
BSUM_L1
SUM_ERRMOVR0,#0
SUM_ENDPOP{R1-R7,PC};
寄存器出栈,返回
END
ARM汇编指令实验的参考程序代码清单
add.s
NEQU5;
AREAExample,CODE,READONLY
ENTRY
CODE32
START
LDRR0,=N
MOVR2,R0;
R2充当计数器
MOVR0,#0
MOVR1,#0
LOOP
CMPR1,R2
BHIADD_END
ADDR0,R0,R1
ADDR1,R1,#1
BLOOP
ADD_END
BSTART
七、练习题
1.如何切换处理器状态
2.在Thumb指令只有哪一条指令具有条件执行功能?
3.如何判断运算结果溢出?
实验四、ARM微处理器工作模式实验
一、实验目的
通过实验掌握学会使用MSR/MRS指令实现ARM处理器工作模式的切换,观察
不同模式下的寄存器,加深对CPU结构的理解。
二、实验设备
Windows98/2000/NT/XP操作系统、仿真器驱动程序、ADS开发软件一套。
三、实验内容
通过ARM汇编指令,在各种处理器模式下切换并观察各种模式下寄存器的区别;
掌握
ARM不同模式的进入与退出。
四、实验原理
1.ARM处理器模式
ARM体系结构支持表1-所示的7种处理器模式。
处理器模式说明:
用户usr正常程序执行模式
FIQfiq支持告诉数据传送或通道处理
IRQIrq用于通用中断处理
管理svc操作系统保护模式
中止abt实现虚拟存储器和/或存储器保护
未定义und支持硬件协处理器的软件仿真
系统sys运行特权操作系统任务
在软件控制下也可以改变模式,外部中断或异常处理也可以引起模式发生改变。
大多数应用程序在用户模式下执行。
当处理器工作在用户模式时,正在执行的程序不能访问某些被保护的系统资源,也不能改变模式,除非异常发生。
这允许适当编写操作系统来控制系统资源的使用。
除用户模式外的其他模式成为特权模式。
它们可以自由地访问系统资源和改变模式。
其
中5种称为异常模式,即:
FIQ(FastInterruptRequest);
IRQ(InterruptRequest);
管理(Supervisor);
中止(Abort);
为定义(Undefined)。
当特定的异常出现时,进入相应的模式。
每种模式都有某些附加的寄存器,以避免异常出现时用户模式的状态不可靠。
剩下的模式是系统模式。
仅ARM体系结构V4以及以上的版本有该模式。
不能由于任
何异常而进入该模式。
它与用户模式有相同的寄存器,但它是特权模式,不受用户模式的限
制。
它供需要访问系统资源的操作系统任务使用,但希望避免使用与异常模式有关的附加寄
存器。
避免使用附加寄存器保证了当任何异常出现时,都不会使任务的状态不可靠。
2.程序状态寄存器
在所有处理模式下,都可以访问当前程序状态寄存器CPSR。
CPSR包含条件码标志、中断禁止位、当前处理器模式以及其他状态和控制信息。
每种异常模式都有一个程序状态保存寄存器SPSR。
当异常出现时,SPSR用于保存CPSR的状态。
CPSR和SPSR的格式如下:
313029282726876543210
NZCVQDNM(RAZ)IFTMMMMM
(1)条件码标志
N、Z、C、V:
大多数指令可以检测这些条码标志,以决定程序指令如何执行。
(2)控制位
最低8位I、F、T和M位用作控制位。
当异常出现时改变控制位。
当处理器在特权模式下时也可以由软件改变。
中断禁止位:
I置1则禁止IRQ中断;
F置1则禁止FIQ中断。
T位:
T=0指示ARM执行;
T=1指示Thumb执行。
在这些体系结构的系统中,可自由地使用能在ARM和Thumb状态之间切换的指令。
模式位:
M0、M1、M2、M3和M4(M[4:
0])是模式位。
这些位决定处理器的工作模
式,如表1-所列:
M[4:
0]模式可访问的寄存器
0b10000用户PC,R14~R0,CPSR
0b10001FIQPC,R14_fiq~R8_fiq,R7~R0,CPSR,SPSR_fiq
0b10010IRQPC,R14_irq~R13_irq,R12~R0,CPSR,SPSR_irq
0b10011管理PC,R14_svc~R13_svc,R12~R0,CPSR,SPSR_svc
0b10111中止PC,R14_abt~R13_abt,R12~R0,CPSR,SPSR_abt
0b11011为定义PC,R14_und~R13_und,R12~R0,CPSR,SPSR_und
0b11111系统PC,R14~R0,CPSR
(3)其他位
程序状态寄存器的其他位保留,用作以后扩展。
1.启动ADS1.2,建立一个新的工程;
2.建立汇编源程序文件TEST3.S,编写实验程序,添加到工程中;
3.编译链接工程,点击Debug按钮,启动AXD进行调试;
4.点击【ProcessorViews】->
【Registers】,打开Current项监视个寄存器的值;
5.单步运行程序,注意观察CPSR、SPSR以及R0寄存器值得变化。
说明:
CPSR寄存器显示方式如图1-所示。
显示分为两部分,一部分是各个标志位,
另一部分是工作模式。
标志位NZCVQ为条件码标志N、Z、C、V、Q,显示为大写字母,表示该位为1;
显示为小写字母,表示该位为0。
Q标志在ARM体系结构v5及以上版本的E变量中才有效。
标志位IFT为IRQ中断禁止位I、FIQ中断禁止位F、ARM微控制器状态位T,显示为
大写字母,表示该位为1;
T标志在ARM体系结构v4及以上版本的T变量中才有效。
6.理解并掌握本实验原理及程序,完成练习题
六、实验参考程序
ARM微控制器工作模式实验的参考程序如下:
定义堆栈的大小
USR_STACK_LEGTHEQU64
SVC_STACK_LEGTHEQU0
FIQ_STACK_LEGTHEQU16
IRQ_STACK_LEGTHEQU64
ABT_STACK_LEGTHEQU0
UND_STACK_LEGTHEQU0
AREAExample3,CODE,READONLY;
声明代码段Example3
ENTRY;
CODE32;
声明32位ARM指令
STARTMOVR0,#0
MOVR1,#1
MOVR2,#2
MOVR3,#3
MOVR4,#4
MOVR5,#5
MOVR6,#6
MOVR7,#7
MOVR8,#8
MOVR9,#9
MOVR10,#10
MOVR11,#11
MOVR12,#12
BLInitStack;
初始化各模式下的堆栈指针
打开IRQ中断(将CPSR寄存器的1位清零)
MRSR0,CPSR;
R0<
-CPSR
BICR0,R0,#0X80
MSRCPSR_cxsf,R0;
CPSR<
-R0
切换到用户模式
MSRCPSR_c,#0xd0
MRSR0,CPSR
切换到管理模式
MRSR0,CPSR
HALTBHALT
InitStack
堆栈初始化,即初始化各模式下下的堆栈指针。
无
在特权模式下调用此子程序,比如复位后的管理模式
MOVR0,LR;
-LR,因为各种模式下R0是相同的
设置管理模式堆栈
MSRCPSR_c,#0xd3
LDRSP,StackSvc
设置中断模式堆栈
MSRCPSR_c,#0xd2
LDRSP,StackIrq
设置快速中断模式堆栈
MSRCPSR_c,#0xd1
LDRSP,StackFiq
设置中止模式堆栈
MSRCPSR_c,#0xd7
LDRSP,StackAbt
设置为定义模式堆栈
MSRCPSR_c,#0xdb
LDRSP,StackUnd
设置系统模式堆栈
MSRCPSR_c,#0xdf
LDRSP,StackUsr
MOVPC,R0
StackUsrDCDUsrStackSpace+(USR_STACK_LEGTH-1)*4
StackSvcDCDSvcStackSpace+(SVC_STACK_LEGTH-1)*4
StackIrqDCDIrqStackSpace+(IRQ_STACK_LEGTH-1)*4
StackFiqDCDFiqStackSpace+(FIQ_STACK_LEGTH-1)*4
StackAbtDCDAbtStackSpace+(ABT_STACK_LEGTH-1)*4
StackUndDCDUndStackSpace+
 升级会员
升级会员 