2机械控制工程基础第二章答案.docx
《2机械控制工程基础第二章答案.docx》由会员分享,可在线阅读,更多相关《2机械控制工程基础第二章答案.docx(24页珍藏版)》请在冰豆网上搜索。
2机械控制工程基础第二章答案
2机械控制工程基础第二章答案
习题
2.1什么是线性系统?
其最重要的特性是什么?
下列用微分方程表示的系统中,表示系统输出,表示系统输入,哪些是线性系统?
(1)
(2)
(3)(4)
解:
凡是能用线性微分方程描述的系统就是线性系统。
线性系统的一个最重要特性就是它满足叠加原理。
该题中
(2)和(3)是线性系统。
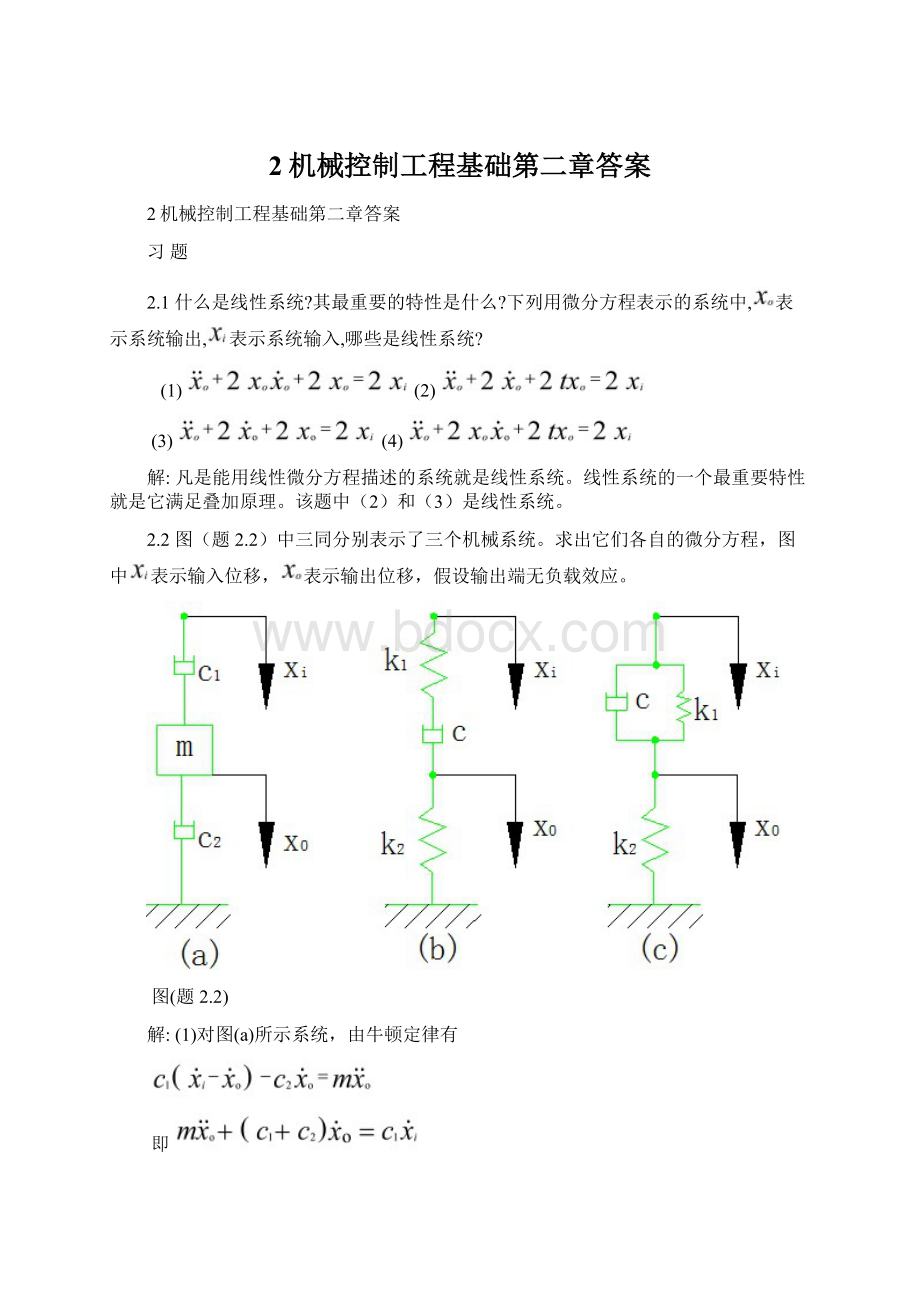
2.2图(题2.2)中三同分别表示了三个机械系统。
求出它们各自的微分方程,图中表示输入位移,表示输出位移,假设输出端无负载效应。
图(题2.2)
解:
(1)对图(a)所示系统,由牛顿定律有
即
(2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有
消除中间变量有
(3)对图(c)所示系统,由牛顿定律有
即
2.3求出图(题2.3)所示电系统的微分方程。
图(题2.3)
解:
(1)对图(a)所示系统,设为流过的电流,为总电流,则有
当工作点为时,
当工作点为时,
2.6已知滑阀节流口流量方程式为,式中.Q为通过节流阀流口的流量;p为节流阀流口的前后油压差;为节流阀的位移量;c为疏量系数;w为节流口面积梯度;为油密度。
试以Q与p为变量(即将Q作为P的函数)将节流阀流量方程线性化。
解:
利用小偏差线性化的概念,将函数Q=F(,p)在预定工作点F(,)处按泰勒级数展开为
消除高阶项,有
若令,,
将上式改写为增量方程的形式
2.7已知系统的动力学方程如下,试写出它们的传递函数Y(s)/R(s)。
(1)
(2)
(3)
(4)
解:
根据传递函数的定义,求系统的传递函数,只需将其动力学方程两边分别在零初始条件下进行拉式变换,然后求Y(s)/R(s)。
(1)
(2)
(3)
(4)
2.8如图(题2.8)为汽车或摩托车悬浮系统简化的物理模型,试以位移x为输入量,位移y为输出量,求系统的传递函数Y(s)/X(s)。
2.9试分析当反馈环节H(s)=1,前向通道传递函数G(s)分别为惯性环节、微分环节、积分环节时,输入、输出的闭环传递函数。
解:
由于惯性环节、微分环节、积分环节的传递函数分别为
,,而闭环传递函数为
则
(1)当反馈环节H(s)=1,前向通道传递函数G(s)为惯性环节时,
(2)当反馈环节H(s)=1,前向通道传递函数G(s)为微分环节时,
(3)当反馈环节H(s)=1,前向通道传递函数G(s)为积分环节时,
2.10证明图(题2.10)与图(题2.3(a)所示系统是相似系统(即证明两系统的传递函数具有相同形式)。
解:
对题2.4(a)系统,可列出相应的方程。
对以上三式分别作Laplce别换,并注意到初始条件为零,即
则
得
得
得
即
则
将(4)式中的代入(9)式
再用(4)式与上式相比以消去,即得电系统的传递函数为
而本题中,引入中间变量x,依动力学知识有
对上二式分别进行拉式变换有
消除有
比较两系统的传递函数有
故这两个系统为相似系统。
2.11一齿轮系如图(题2.11)所示。
图中,、、和分别为各齿轮齿数;、、和表示各种传动轴上的转动惯量,、和为各轴的角位移;是电动机输出转矩。
试列写折算到电动轴上的齿轮系的运动方程。
2.12求图(题2.12)所示两系统的传递函数。
图(题2.12)
解:
(1)由图(a)中系统,可得动力学方程为
作Laplce别换,得
则有
(2)由图(b)中系统,设i为电网络的电流,可得方程为
作Laplce别换,得
消除中间变量有
2.13某直流调速系统如图(题2.13)所示,为给定输入量,电动机转速n为系统的输出量,电动机的负载转矩为系统的扰动量。
各环节的微分方程:
比较环节
比例调节器(为放大系数)
晶闸管触发整流装置(为整流增益)
电动机电枢回路
(为电枢回路电阻,为电枢回路电感,为电枢电流)
电枢反电势(为反电势系数)
电磁转矩(为转矩系数)
负载平衡方程(为转动惯量,为负
载转矩)
测速电动机(为转速反馈系数)
试根据所给出的微分方程,绘制各环节相应的传递函数方框图和控制系数的传递函数方框图,并由方框图求取传递函数和。
2.14试绘制图(题2.14)所示机械系统传递函数方框图。
2.15若系统传递函数方框图为图(题2.15)。
(1)求以为输入,当时,分别以、、、为输出的闭环传递函数;
(2)求以为输入,当时,分别以、、、为输出的闭环传递函数;
(3)比较以上各传递函数的分母,从中可以得出什么结论?
图(题2.15)
解:
(1)求以为输入,当时:
若以为输出,有
若以为输出,有
若以为输出,有
若以为输出,有
(2)求以为输入,当时:
若以为输出,有
若以为输出,有
若以为输出,有
若以为输出,有
(3)从上可知:
对于同一个闭环系统,当输入的取法不同时,前向通道的传递出数不同,反馈回路的传递函数不同,系统的传递函数也不同,但系统的传递函数的分母保持不变,这是因为这一分母反映了系统的固有特性,而与外界无关。
2.16已知某系统的传递函数方框图为图(题2.16),其中,为输入,为输出,N(s)为干扰,试问:
G(s)为何值时,系统可以消除干扰的影响。
图(题2.16)
解:
方法一:
根据线性系统的叠加原理,令,N(s)为输入,系统的输出为
其中
令
有
方法二:
令,N(s)为输入,则系统的传递函数方框图可以表示成图(题2.16.b)所示。
图(题2.16.b)
根据相加点前后移动的规则可以将其进一步简化成图(题2.16.c)和图(题2.16.d)所示的形式。
图(题2.16.c)
图(题2.16.d)
因此,系统在N(s)为输入时的传递函数为
同样可得时,系统可消除干扰的影响。
2.17系统结构如图(题2.17)所示,求系统传递函数。
2.18求出(题2.18)所示系统的传递函数。
图(题2.18)
解:
方法一:
利用梅逊公式,可得
方法二:
利用方框图简化规则,有图(题2.18.b)
图(题2.18.b)
2.19求出图(题2.19)所示系统的传递函数。
图(题2.19)
解:
根据方框图简化规则,有图(题2.19.b)
图(题2.19.b)
2.20求出图(题2.20)所示系统的传递函数。
图(题2.20)
解:
根据方框图简化规则,有图(题2.20.b)
图(题2.20.b)
2.21设描述系统的微分方程为
(1)
(2)
试导出系统的状态方程。
2.22RLC电网络如图(题2.22)所示,u(t)为输入,流过电阻的电流为输出,试列写该网络的状态方程及输出方程。
2.23系统传函数方框图为图(题2.23),试列写该系统的状态方程及输出方程。
2.24图(题2.24)为某一级倒立摆系统示意图。
滑台通过丝杠传动,可沿一直线的有界导轨沿水平方向运动;摆杆通过铰链与滑台连接,可在沿直线平面内摆动。
滑台质量为M,摆杆质量为m,摆杆转动惯量为J,滑台摩擦系数为c,摆杆转动轴心到杆质心的长度为L,加在滑台水平方向上的合力为u,滑台位置为x,摆杆与铅直向上的夹角为。
(1)以为输入,为输出,列写系统的微分方程;
(2)求系统的传递函数;
(3)试列写该系统的状态方程及输出方程。
 升级会员
升级会员 