《传感器与检测技术》试题及答案已做文档格式.docx
《《传感器与检测技术》试题及答案已做文档格式.docx》由会员分享,可在线阅读,更多相关《《传感器与检测技术》试题及答案已做文档格式.docx(9页珍藏版)》请在冰豆网上搜索。
简答题
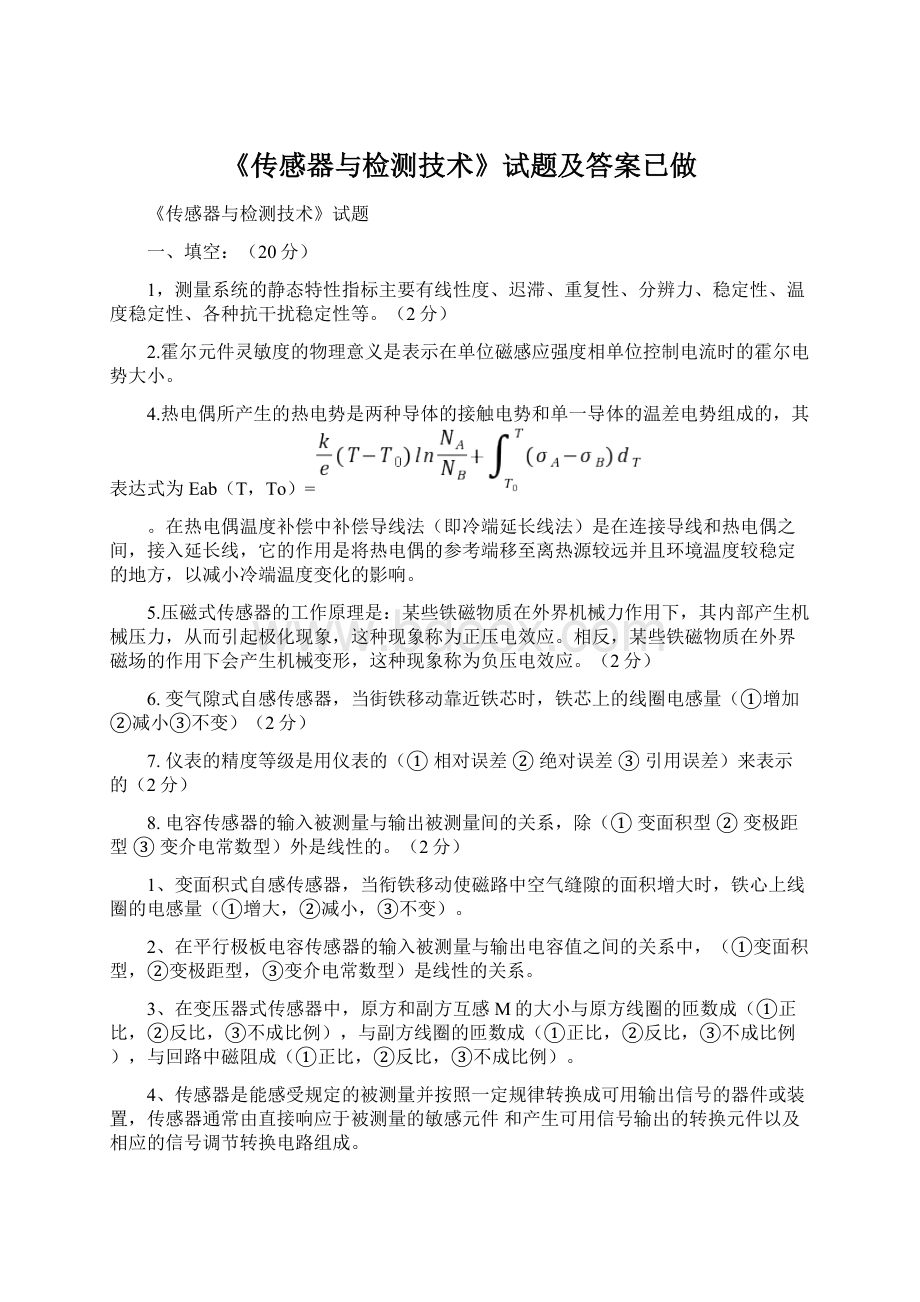
二、用镍铬-镍硅热电偶测量某低温箱温度,把热电偶直接与电位差计相连接。
在某时刻,从电位差计测得热电势为-1.19mv,此时电位差计所处的环境温度为15℃,试求该时刻温箱的温度是多少度?
镍铬-镍硅热电偶分度表
测量端温度℃
1
2
3
4
5
6
7
8
9
热
电
动
势
(mv)
-20
-0.77
-0.81
-0.84
-0.88
-0.92
-0.96
-0.99
-1.03
-1.07
-1.10
-10
-0.39
-0.43
-0.47
-0.51
-0.55
-0.59
-0.62
-0.66
-0.70
-0.74
-0
-0.00
-0.04
-0.08
-0.12
-0.16
-0.20
-0.23
-0.27
-0.31
-0.35
+0
0.00
0.04
0.08
0.12
0.16
0.20
0.24
0.28
0.32
0.36
+10
0.40
0.44
0.48
0.52
0.56
0.60
0.64
0.68
0.72
0.76
+20
0.80
0.84
0.88
0.92
0.96
1.00
1.04
1.08
1.12
1.16
2简述热电偶的工作原理。
答:
热电偶的测温原理基于物理的“热电效应”。
所谓热电效应,就是当不同材料的导体组成一个闭合回路时,若两个结点的温度不同,那么在回路中将会产生电动势的现象。
两点间的温差越大,产生的电动势就越大。
引入适当的测量电路测量电动势的大小,就可测得温度的大小。
3以石英晶体为例简述压电效应产生的原理。
石英晶体在沿一定的方向受到外力的作用变形时,由于内部电极化现象同时在两个表面上产生符号相反的电荷,当外力去掉后,恢复到不带电的状态;
而当作用力方向改变时,电荷的极性随着改变。
晶体受力所产生的电荷量与外力的大小成正比。
这种现象称为正压电效应。
反之,如对石英晶体施加一定变电场,晶体本身将产生机械变形,外电场撤离,变形也随之消失,称为逆压电效应。
石英晶体整个晶体是中性的,受外力作用而变形时,没有体积变形压电效应,但它具有良好的厚度变形和长度变形压电效应。
4简述电阻应变片式传感器的工作原理(6分)
电阻应变片的工作原理是基于电阻应变效应,即在导体产生机械变形时,它的电阻值相应发生变化。
1、什么是传感器动态特性和静态特性,简述在什么频域条件下只研究静态特就能够满足通常的需要,而在什么频域条件下一般要研究传感器的动态特性?
(10分)
传感器的特性是指传感器所特有性质的总称。
而传感器的输入输出特性是其基本特性,一般把传感器作为二端网络研究时,输入输出特性是二端网络的外部特性,即输入量和输出量的对应关系。
由于输入量的状态(静态、动态)不同分静态特性和动态特性。
静态特性是指当输入量为常量或变化极慢时传感器输入-输出特性。
动态特性指当输入量随时间变化时传感器的输入-输出特性。
可以从时域和频域来研究动态特性
2、简述霍尔电动势产生的原理。
(5分)
一块半导体薄片置于磁感应强度为B的磁场(磁场方向垂直于薄片)中,当有电流I流过时,电子受到洛仑兹力作用而发生偏转。
结果在半导体的后端面上电子有所积累。
而前端面缺少电子,因此后端面带负电,前端面带正电,在前后端面形成电场,该电场产生的力阻止电子继续偏转当两力相平衡时,电子积累也平衡,这时在垂直于电流和磁场的方向上将产生电场,相应的电势称为霍尔电势UH。
3、分析应变片式传感器在使用单臂电桥测量电路时由于温度变化而产生测量误差的过程。
在外界温度变化的条件下,由于敏感栅温度系数
及栅丝与试件膨胀系数(
)之差异性而产生虚假应变输出有时会产生与真实应变同数量级的误差。
二、寄生电容与电容传感器相关联影响传感器的灵敏度,它的变化为虚假信号影响传感器的精度。
试阐述消除和减小寄生电容影响的几种方法和原理。
(15分)
三、在生产过程中测量金属板的厚度,非金属板材的镀层厚度时常用涡流传感器。
试简要叙述说明利用涡流传感器测量金属板厚度的工作原理及实现工艺。
(15)
5、什么是传感器静态特性。
(4分)
传感器的静态特性是指当输入量为常量或变化极慢时传感器输入—输出特性。
三、什么叫做热电动势、接触电动势和温差电动势?
说明势电偶测温原理及其工作定律的应用。
分析热电偶测温的误差因素,并说明减小误差的方法(10分)
热电动势:
两种不同材料的导体(或半导体)A、B串接成一个闭合回路,并使两个结点处于不同的温度下,那么回路中就会存在热电势。
因而有电流产生相应的热电势称为温差电势或塞贝克电势,通称热电势。
接触电动势:
接触电势是由两种不同导体的自由电子,其密度不同而在接触处形成的热电势。
它的大小取决于两导体的性质及接触点的温度,而与导体的形状和尺寸无关。
温差电动势:
是在同一根导体中,由于两端温度不同而产生的一种电势。
热电偶测温原理:
热电偶三定律
a中间导体定律
热电偶测温时,若在回路中插入中间导体,只要中间导体两端的温度相同,则对热电偶回路总的热电势不产生影响。
在用热电偶测温时,连接导线及显示一起等均可看成中间导体。
b中间温度定律
任何两种均匀材料组成的热电偶,热端为T,冷端为
时的热电势等于该热电偶热端为T冷端为
时的热电势与同一热电偶热端为
,冷端为
时热电势的代数和。
应用:
对热电偶冷端不为
时,可用中间温度定律加以修正。
热电偶的长度不够时,可根据中间温度定律选用适当的补偿线路。
c参考电极定律
如果A、B两种导体(热电极)分别与第三种导体C(参考电极)组成的热电偶在结点温度为(T,
)时分别为
,
,那么爱相同温度下,又A、B两热电极配对后的热电势为
实用价值:
可大大简化热电偶的选配工作。
在实际工作中,只要获得有关热电极与标准铂电极配对的热电势,那么由这两种热电极配对组成热电偶的热电势便可由上式求得,而不需逐个进行测定。
误差因素:
参考端温度受周围环境的影响
措施:
a
恒温法b计算修正法(冷端温度修正法)c仪表机械零点调整法
d热电偶补偿法e电桥补偿法f冷端延长线法
四、霍尔元件能够测量哪些物理参数?
霍尔元件的不等位电势的概念是什么?
温度补偿的方法有哪几种?
请详细推导分流法。
霍尔组件可测量磁场、电流、位移、压力、振动、转速等。
霍尔组件的不等位电势是霍尔组件在额定控制电流作用下,在无外加磁场时,两输出电极之间的空载电势,可用输出的电压表示。
温度补偿方法:
a分流电阻法:
适用于恒流源供给控制电流的情况。
b电桥补偿法
一、简答题(30分,6分/题)
1、从传感器的静态特性和动态特性考虑,详述如何选用传感器。
考虑传感器的静态特性的主要指标,选用线性度大、迟滞小、重复性好、分辨力强、稳定性高、抗干扰稳定性高的传感器。
考虑动态特性,所选的传感器应能很好的追随输入量的快速变化,即具有很短的暂态响应时间或者应具有很宽的频率响应特性。
2、直流电桥和交流电桥有何区别?
直流电桥的平衡条件是什么?
应变片式电阻传感器、自感式、互感式、涡流式、电容式、热电阻式传感器分别可采用哪种电桥作为测量电路?
根据电源不同分为直流和交流电桥。
直流电桥优点:
高稳定度直流电源容易获得,电桥平衡电路简单,传感器至测量仪表的连接导线分布参数影响小。
但是后续要采用直流放大器,容易产生零点漂移,线路也较复杂。
交流电桥在这些方面都有改进。
直流电桥平衡条件:
R1/R2=R3/R4,R1R4=R2R3。
3、以自感式传感器为例说明差动式传感器可以提高灵敏度的原理。
解:
差动式灵敏度:
与单极式传感器灵敏度
比较
灵敏度提高一倍,非线性大大减少。
4、传感器的定义和组成框图?
画出自动控制系统原理框图并指明传感器在系统中的位置和作用。
传感器是能感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置,通常由敏感元件和转换元件组成。
传感器处于研究对象与测试系统的接口位置,即检测与控制之首。
传感器是感知、获取与检测信息的窗口,一切科学研究与自动化生产过程要获取的信息都要通过传感器获取并通过它转换成容易传输与处理的电信号,其作用与地位特别重要。
组成框图:
自动控制系统原理框图:
传感器的作用:
感受被测量并转换成可用输出信号传送给控制对象。
5、试列出你所学过的不同工作原理传感器哪些可用于非接触式测量,哪些用于接触式测量,测量何种物理量?
(各≥3种)
非接触式测量:
a)热电式传感器:
测量温度
b)光纤传感器:
测量光信号
c)核辐射传感器:
测量核辐射粒子
接触式测量:
a)电位器式压力传感器:
测量压力
b)应变片式电阻传感器:
测量电阻值
c)应变式扭矩传感器:
测量扭矩
6、传感器(或测试仪表)在第一次使用前和长时间使用后需要进行标定工作,请问标定的意义?
传感器的标定分为静态标定和动态标定两种。
静态标定的目的是确定传感器静态特性指标,如线性度、灵敏度、滞后和重复性等。
动态标定的目的是确定传感器的动态特性参数,如频率响应、时间常数、固有频率和阻尼比等。
7、压电式传感器的前置放大器的作用是什么?
电压式与电荷式前置放大器各有何特点?
作用是将输出电压放大,并与输入电压或输入电流成正比。
电压放大器将压电式传感器的高输出阻抗经放大器变换为低阻抗输出,并将微弱的电压信号进行适当放大,但其所接配的压电式传感器的电压灵敏度将随电缆分布电容及传感器自身电容的变化而变化,而且电缆的的更换得引起重新标定的麻烦。
电荷放大器是一种具有深度电容负反馈的高增益运算放大器,其虽然允许使用很长的电缆,并且电容Ce变化不影响灵敏度,但它比电压放大器价格高,电路较复杂,调整也比较困难。
8、什么是金属应变片的灵敏系数?
请解释它与金属丝灵敏系数的区别。
应变片一般做成丝栅状,测量应变时,将应变片贴在试件表面上,试件的变形很容易传到应变片上。
金属应变片的灵敏系数与金属丝灵敏系数是不同的。
第一,零件的变形是通过剪力传到金属丝上的。
第二,丝沿长度方向承受应变时,应变片弯角部分也承受应变,其截面积变大,则应变片直线部分电阻增加时,弯角部分的电阻值减少,也使变化的灵敏度下降。
因此,应变片的灵敏系数比金属丝灵敏系数低。
二、分析/证明题(32分,8分/题)
1、压电式传感器更适用于静态测量,此观点是否正确,分析原因。
答不正确。
其工作原理是基于压电材料的压电效应,具有使用频率宽,灵敏度高、信噪比高、结构简单、工作可靠、测量范围广等优点,因此在压力冲击和震动等动态参数测试中是主要的传感器品种,它可以把加速度、位移、压力、温度、湿度等许多非电量转换为电量。
2、为什么要对应变片式电阻传感器进行温度补偿,分析说明该类型传感器温度误差补偿方法。
①在外界温度变化的条件下,由于敏感栅温度系数
②方法:
自补偿法线路补偿法
3、Pt100和Cu50各代表什么传感器?
分析热电阻传感器测量电桥之三线、四线连接法的主要作用。
分别代表铂电阻热电式传感器(100Ω),铜电阻热电式传感器(50Ω).热电阻传感器测量电桥之三线、四线连接法的主要作用是消除在热电阻安装的地方与仪表相距远时,环境温度变化时其连接导线电阻也变化所造成的测量误差。
4、用镍铬-镍硅热电偶测量炉温,其仪表示值为600℃,而冷端温度t0为65℃,则实际温度为665℃,对不对?
为什么?
应如何计算?
对。
查表知镍铬-镍硅热电偶K=1,T=Tz+KTn=600+1×
65=665
5、制作霍尔元件应采用什么材料,为什么?
为何霍尔元件都比较薄,而且长宽比一般为2:
1?
制作霍尔元件应采用半导体材料。
如果磁场与薄片法线有夹角,那么UH=kHIBcos,霍尔元件越薄(即d越小),kH就越大,所以一般霍尔元件都很薄。
又因为实际测量中UH=(kHIB/d)×
f(l/b)当l/b=2时,f(l/b)=0.93为最大值,这时UH也可取到最大值,所以长宽比l/b一般为2:
12系统的系统响应带宽与传感器的响应带宽无关,请问这种说法正确吗?
试述理由。
不正确。
传感器的响应带宽会限制系统的系统响应带宽。
 升级会员
升级会员 