模糊控制大作业Word文档格式.docx
《模糊控制大作业Word文档格式.docx》由会员分享,可在线阅读,更多相关《模糊控制大作业Word文档格式.docx(13页珍藏版)》请在冰豆网上搜索。
3、分析系统在模糊控制和PID控制作用下的抗干扰能力(加噪声干扰)、抗非线性能力(加死区和饱和特性)、抗时滞的能力(对时滞大小加以改变)和结构变化的能力(1阶系统变2阶以上系统)。
4、为系统设计模糊PID控制器(选作)。
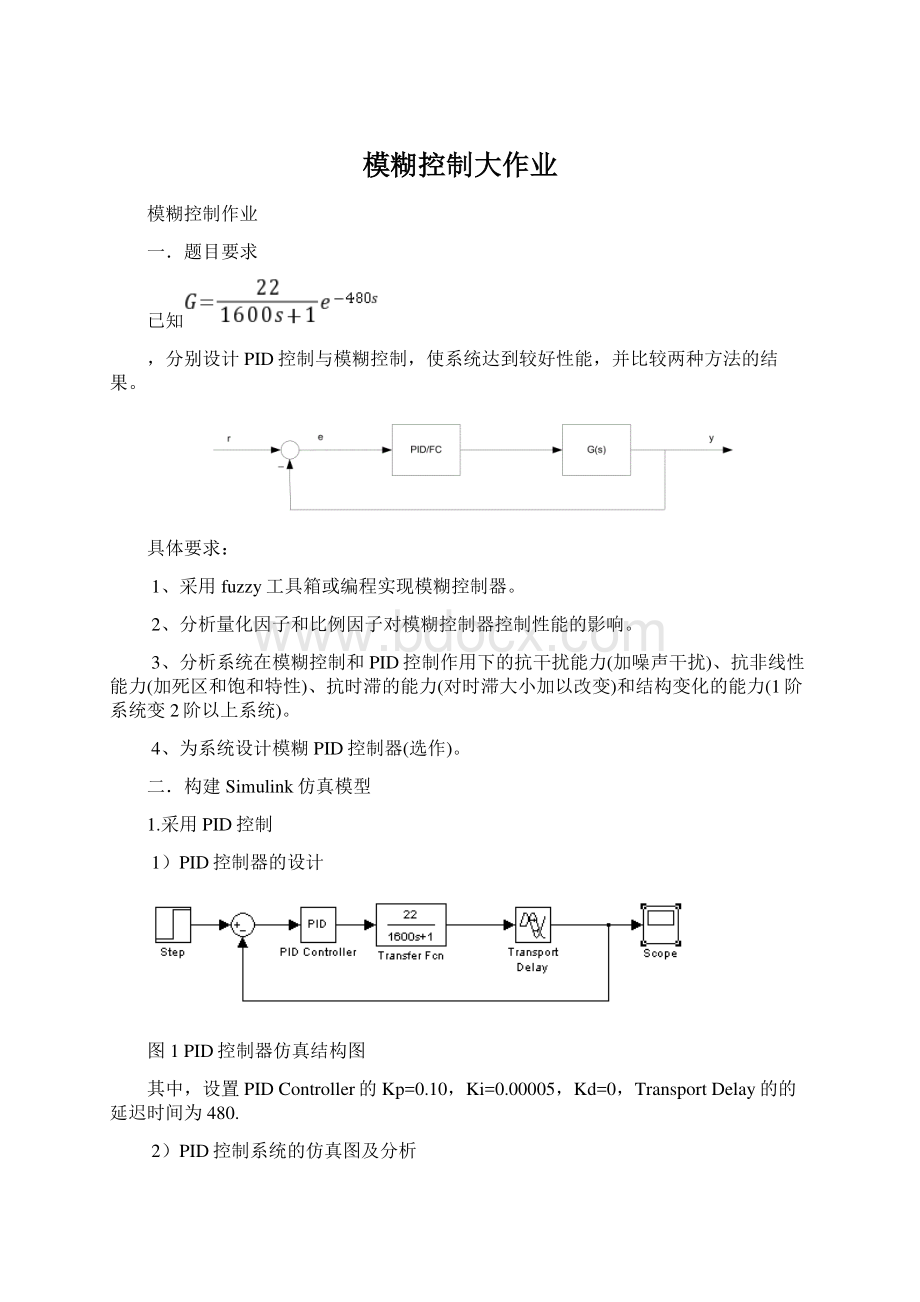
二构建Simulink仿真模型1.采用PID控制1)PID控制器的设计图1PID控制器仿真结构图其中,设置PIDController的Kp=0.10,Ki=0.00005,Kd=0,TransportDelay的的延迟时间为480.2)PID控制系统的仿真图及分析仿真结果分析:
调节时间ts=1520s,上升时间tr为700s超调量9.3%,延迟时间td为2250s。
由图1-2可见,PID控制器的调节时间较长,原因可能是三个参数的调解未达到最佳状态,具体是因为三个参数对于三阶加延时环节的被控对象只能通过经验试凑法来不断调节,所以很难达到最佳状态,该题中延迟环节的时间常数已经达到480,若Kp设置过大,会影响系统稳定导致震荡,采用常规PID控制的效果并不令人满意。
图2.PID控制系统响应曲线2.采用模糊控制1)模糊控制器的设计根据系统实际情况,选择e,de和u的论域erange:
-66ecrange:
-66urange:
-662)e,de和u语言变量的选取e7个:
NB,NM,NS,ZO,PS,PM,PBec7个:
NB,NM,NS,ZO,PS,PM,PBu7个:
NB,NM,NS,ZO,PS,PM,PB3)模糊规则确定ueNBNMNSZOPSPMPBececNBPBPBPMPMPSZOZONMPBPBPMPMPSZOZONSPBPBPMPSZONMNMZOPBPBPMZONMNBNBPSPMPMZONSNMNBNBPMZOZONSNMNMNBNBPBZOZONSNMNMNBNB表1模糊规则表图3.模糊控制规则的添加图4.模糊控制器的输出量4)隐含和推理方法的制定隐含采用mamdani方法:
max-min推理方法,min方法去模糊方法:
重心法选择隶属函数的形式:
三角型。
图5.模糊控制规则5)模糊控制器的仿真图6模糊控制器仿真结构图在Simulink中连接各仪器,修改响应参数,通过readfis函数将模糊规则控制库cyl.fis导入到fuzzy-logiccontroller中。
其中设置参数分别为:
Ke=1.3,Kec=500,Ku=0.06。
由图7可以看出,采用模糊控制的上升时间为350s,超调量为8.8%,调节时间为1520s,但是稳态误差较大,即使经反复调整参数,也无法将稳态误差控制在10%以内。
因此,对于确定的系统,模糊控制和PID控制分别具有各自的优点。
无法绝对的判断优劣。
图7模糊控制响应曲线三、仿真系统性能分析1.量化因子和比例因子对模糊控制器控制性能的影响在模糊控制器中,两个输入(即误差和误差的倒数)前要加入量化因子,将连续论域转化为离散论域,则量化因子;
对误差倒数,量化因子为;
模糊输出的控制量u的比例因子为。
图8模糊控制的系统阶跃响应曲线(增大量化因子)图9模糊控制的系统阶跃响应曲线(减小量化因子)由图8图9可以看出,量化因子的大小对控制系统的动态性能影响很大。
由图3-1图3-2可知选的较大时,系统超调较大,过渡时间较长;
选择越大系统超调越小,但系统的响应速度变慢,对超调的抑制作用十分明显。
图10模糊控制的系统阶跃响应曲线(增大比例因子Ku)图11模糊控制的系统阶跃响应曲线(减小比例因子Ku)由图10和图11可知,输出比例因子Ku作为模糊控制器的总增益,它的大小影响着控制器的输出,也影响着模糊控制系统的特性。
Ku选择过小会使系统动态动态响应过程变长,且会有负的稳态误差。
而Ku选择过大会导致系统振荡加剧,且产生正的稳态误差。
2.PID控制器和模糊控制器抗干扰性能对比图12模糊控制的系统结构图(加白噪声)图13PID控制的系统结构图(加白噪声)图14模糊控制的系统响应曲线(加白噪声)图15PID控制的系统响应曲线(加白噪声)分别对模糊控制系统和PID控制系统加入干扰信号白噪声,如图12以及图13所示,由响应曲线图14,图15可得,PID控制加入噪声干扰使系统不稳定,出现比较剧烈的震荡。
对加入模糊控制器的系统加入噪声干扰,系统的抗干扰能力比PID控制器要略好,震荡的幅度比较小。
3.PID控制器和模糊控制器抗时滞能力对比图16模糊控制系统响应曲线(延时为300s)图17PID控制系统响应曲线(延时为300s)将系统的时滞改为300s,可得模糊控制和PID控制响应曲线如图16,图17所示,当时滞减小时,模糊控制和PID控制的系统阶跃响应均消失,但是模糊控制下的系统超调的改善明显好于PID控制系统的超调改善。
3.PID控制器和模糊控制器抗非线性能力对比加入死区和饱和特性后模糊控制与PID控制均出现负误差,与PID控制相比,模糊控制的响应时间变化不大,但是稳态误差变化较大,所以,综合来看,PID控制的抗非线性干扰能力强。
图18模糊控制系统结构图(加死区和饱和特性)图19PID控制系统结构图(加死区和饱和特性)图20模糊控制系统响应曲线(加死区和饱和特性)图21PID控制系统响应曲线(加死区和饱和特性)4.PID控制器和模糊控制器增加系统阶数控制效果比较分别对模糊控制系统和PID控制系统加入1/100s+1,增加系统阶数,如图24以及图25观察模糊控制以及PID控制效果的变化。
由图可知,当系统阶数增加后,模糊控制和PID控制的超调量均增加,但模糊控制的超调量增加的百分比和调节时间均大于PID控制。
所以,在此系统中增加系统阶数,PID控制的效果较好。
图22模糊控制系统结构图(增加系统阶数)图23PID控制系统结构图(增加系统阶数)图24模糊控制系统响应曲线(增加系统阶数)图25PID控制系统响应曲线(增加系统阶数)5.模糊控制与PID控制性能综合分析系统在模糊控制和PID控制作用下的加噪声干扰、加死区和饱和特性以及对时滞大小加以改变,分析系统在模糊控制和PID控制作用下的抗干扰能力、抗非线性能力以及抗时滞的能力,模糊控制下的系统阶跃响应输出特性更好些。
 升级会员
升级会员 