基于单片机的自动往返小车Word文档下载推荐.docx
《基于单片机的自动往返小车Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《基于单片机的自动往返小车Word文档下载推荐.docx(14页珍藏版)》请在冰豆网上搜索。
1.光电检测部分:
我们采用反射式光电检测电路对跑道上的黑线进行检测,并用两个遮光套管套住发光管和接收管以一定的角度紧贴跑道,这样可以消除外界光线的干扰,用LM358电压比较器输出高低电平检测信号。
如图所示:
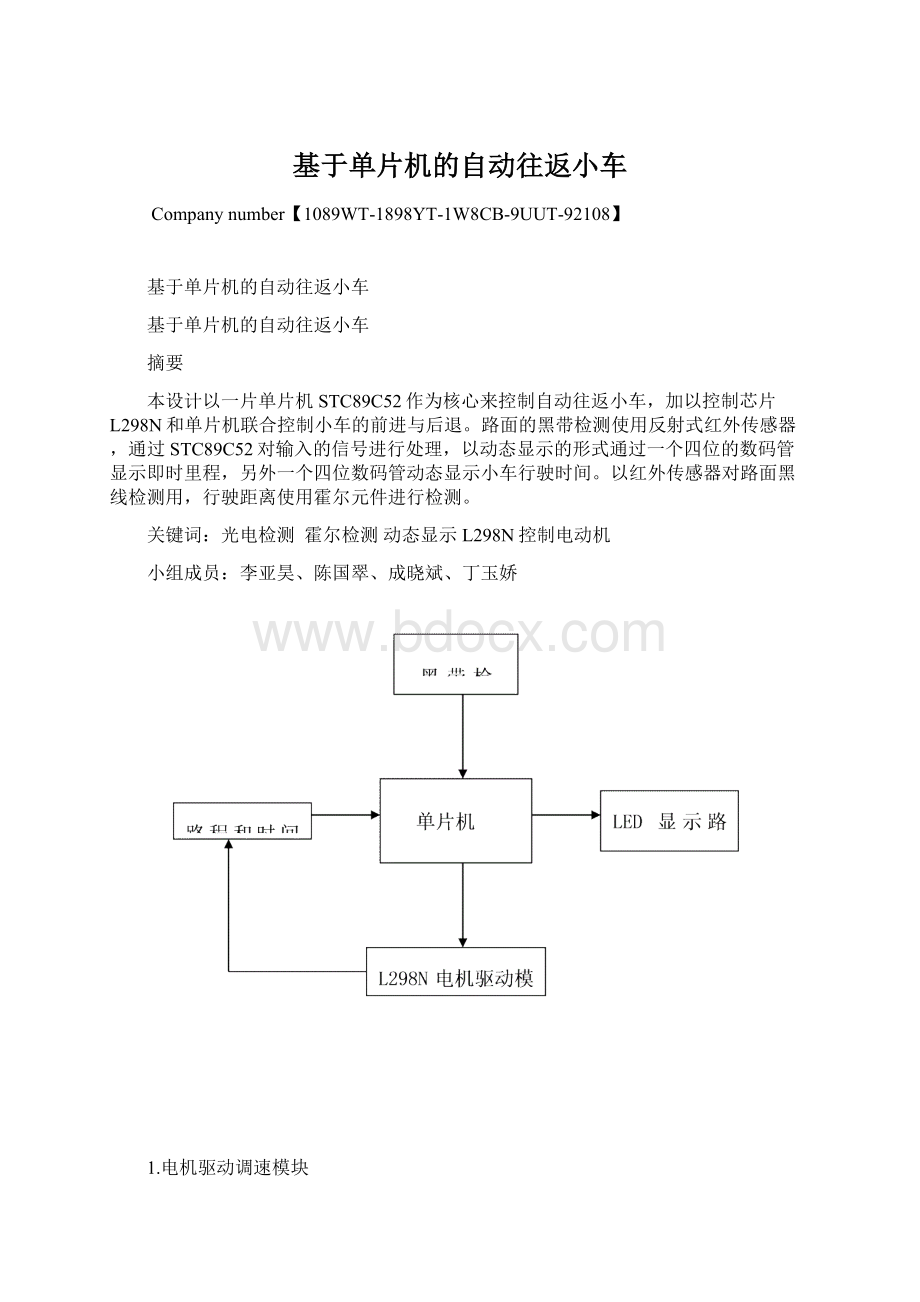
2.STC89C52单片机基本系统
此系统以89C52为核心,每检测到一个黑带由光电检测部分产生一个的脉冲,使单片机产生一个外部中断1,定义检测黑带数的变量加1,同时车轮每转一圈,霍尔元件输出一个脉冲,是安单片机产生一个外部中断0,定义圈数的变量加1.通过和控制L298来控制电机的正转与反转及刹车。
当输出低电平,输出高电平时,电机正转,相反则电机反转,当和都是低电平时,使电动机被短路,提高了刹车效率,基本杜绝了由于制动惯性造成的小车的前冲现象。
通过P0口进行两个数码管的位选,P2口进行段码输出,其中一个数码管显示行驶时间,另外一个数码管显示行驶路程。
3.L298N电动机驱动模块部分
该电路采用电动机驱动芯片L298来控制电动机的正转与反转,加以第二路电机电源保证了电动机启动时有足够的电流。
在试验中控制电压为单片机输出的高低电平直接控制。
具体电路图连接如下:
4.电源部分
由于电动机工作电流大,需要选用内阻小,供电电流强,质量轻,可反复使用的经济型电池,我们选用可充电电池组。
为使单片机工作稳定,避免电动机开关机和其转动时对其电源的影响,在此用两个电池组和稳压块7805分别为89C52和电动机驱动显示部分分别进行供电。
保证小车工作和显示的稳定性。
5.软件设计部分
单片机控制电路主要由一片STC89C52组成,通过P3口控制小车正转与反转,刹车,加速减速,通过两个四联数码管控制显示时间和里程以及小车行驶的时间。
其中P0口进行位选,P2口进行显示段码输出。
该系统采用上电复位加上手动复位联合复位系统进行初始化,单片机通过,输出脉冲控制电机正转反转以及刹车,当,分别输出01是电动机正转,输出10时电动机反转,输出00时电动机两边短路,小车立即刹车。
流程图如下:
(1)外部中断0
车轮美转一次,霍尔元件产生一个脉冲,通过下降沿触发外部中断0,并且在每进行一次外部中断记录圈数的变量加1.
(2)外中断1
光电检测每检测到一条黑带就产生一个脉冲输入口,通过下降沿的方式触发外中断1,每中断一次记录黑带的变量加1,当检测到第六条黑带时,=1,=1,小车的电动机由于短路刹车,当检测到第十二条黑带时,小车再次刹车同时关掉所有中断
(3)定时器中断0
使用定时器T0产生5ms定时中断,每次执行该中断前要先给定时器0赋初值,定时器中断每执行一次,变量加1。
当i=200时,即每当计时1秒时,时间变量t加1,速度等于一秒转的圈数和小车车轮的周长相乘。
(4)定时器中断1
主要用来产生不同的占空比的波型进行高低速控制,每次执行时,定时器1要赋初值。
(5)主程序
主程序主要用来控制两个四联数码管的显示,通过循环语句不断的调用显示程序,使两个四联数码管按位不断循环亮点,当小车行驶时动态显示时间和路程,小车停止时显示小车行驶过程中的时间和路程。
6.安装与调试
自动小车为玩具遥控小汽车的改装品,在改装的过程中最重要的是考虑设计光电检测管的位置,检测黑带的光电管放在车体的中央,用遮光管将其以一定反射角度压到跑道上。
路程检测用槽型光耦,放在小车的从动轮上。
轮子的周长约为厘米,在轮子上用了一个霍尔元件,每转一圈一个脉冲。
在组装前对每一个单元电路进行测试,以保证外部硬件电路的无误,有利于最后的统调。
调整是以点到线,最后到整体调试的方法。
在调整的过程中我们发现了许多问题,如响应中断的次数的调整等。
并且为了小车碰到墙壁不至于停车,我们在小车的四角上都加上了导向轮,导向轮用随身听的压带轮制作即可。
7.附录元器件及程序如下:
基本元器件列表
一个STC89C52单片机
2个四位共阳数码管
一个L298N芯片
一个霍尔元件和小磁钢片
一路循迹模块
晶振(12M)及30pf电容
开关
电阻10k100欧姆1k20k可调
程序:
#include<
>
//包含头文件
#defineuintunsignedint//宏常量定义
#defineucharunsignedchar//宏常量定义
sbitdianji1=P1^0;
//P1_0设置为电机控制一
sbitdianji2=P1^1;
//P1_1设置为电机控制二
sbithdjc=P3^2;
//P3_2设置为黑带检测位
ucharcodeduma[]={
0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f};
//段编码
ucharcodedianduma[]={
0xbf,0x86,0xdb,0xcf,
0xe6,0xed,0xfd,0x87,
0xff,0xef};
//带小数点段编码
ucharcodewema[]={
0x01,0x02,0x04,0x08,
0x10,0x20,0x40,0x80,
0x00,0xff};
//位编码
ucharnum,ge,shi,bai,qian;
//定义几个字符型变量
uintmiao,lc,heidai=0;
//定义几个整形变量
longintqs;
//定义一个长整形变量用来记录小车所转的圈数
voidfenwei(uint);
//声明一个分位函数用来把要显示的数分位
voidshuma(uchar,uchar);
//声明一个数码上显示函数用来在数码管上显示数据
voidshumadian(uchar,uchar);
//声明另一个数码显示函数用来显示带小数点的数据
voidmiaoxianshi(uint);
//声明一个显示时间的函数
voidlcxs(uint);
//声明一个显示路程的函数
voiddjkz();
//声明一个电机控制函数
voiddelay(uchar);
//声明一个延时函数
voiddelay10s();
//声明另一个延时函数用来延时十秒钟
voidfenwei(uintx)//把需要在数码管上显示的数据分位
{
ge=x%10;
shi=(x%100)/10;
bai=(x%1000)/100;
qian=x/1000;
}
voidshuma(ucharx,uchary)//将需要显示的数据显示在数码管上
P0=wema[8];
P2=duma[x];
P0=wema[y];
delay(5);
voidshumadian(ucharx,uchary)//将需要显示的数据显示在数码管上
P2=dianduma[x];
voidmiaoxianshi(uintx)//将定时器0输出的时间显示在数码管上
fenwei(x);
shuma(ge,3);
shuma(shi,2);
shumadian(bai,1);
shuma(qian,0);
voidlcxs(uintz)//将外部中断1输出的路程显示在数码
fenwei(z);
shuma(ge,7);
shuma(shi,6);
shumadian(bai,5);
shuma(qian,4);
voiddjkz()//控制电机运转
ucharn=20,m=60;
switch(heidai)
{
case0:
case1:
case2:
dianji1=1;
dianji2=0;
miaoxianshi(miao);
lcxs(lc);
break;
case3:
while(m--)
{
dianji1=1;
dianji2=0;
delay(70);
dianji1=0;
delay(30);
miaoxianshi(miao);
lcxs(lc);
}
while(heidai==3)
{
dianji1=1;
dianji2=0;
delay(13);
dianji1=0;
delay
(1);
miaoxianshi(miao);
lcxs(lc);
}
case4:
while(heidai==4)
delay(25);
case5:
case6:
while(n--)
delay(50);
dianji2=1;
delay10s();
while(heidai==6)
dianji2=1;
case7:
case8:
dianji1=0;
case9:
while(heidai==7)
delay(90);
delay
(1);
case10:
case11:
case12:
TR0=0;
while
(1)
default:
}
voiddelay(ucharx)//延时
uchari,j;
for(i=x;
i>
0;
i--)
for(j=50;
j>
j--);
voiddelay10s()//延时十秒钟
uinti,j;
for(i=15;
for(j=123;
j--)
}
voidext0()interrupt0//外部中断0,用来检测黑带
delay(50);
if(hdjc==0)
heidai++;
voidtime0()interrupt1//函数功能:
定时器中断0,用来记录时间
TH0=(65536-500)/256;
TL0=(65536-500)%256;
num++;
if(num==20)
num=0;
miao++;
}
}
voidext1()interrupt2//函数功能:
外部中断1,记录车轮转过的圈数
qs++;
lc=(int)(qs*;
voidmain()
{
EA=1;
//打开总中断
ET0=1;
//打开定时器中断0
EX0=1;
//打开外部中断1
IT0=1;
//外部中断0设置为跳变沿触发方式
EX1=1;
IT1=1;
//外部中断1设置为跳变沿触发方式
TMOD=0x01;
//设置定时器0为方式1
//定时器0高八位装初值
TL0=(65536-500)%256;
//定时器0低八位装初值
TR0=1;
//打开定时器0
while
(1)//进入主循环
{
djkz();
//进入电机控制函数
}
 升级会员
升级会员 