伺服及其控制源程序要点Word格式文档下载.docx
《伺服及其控制源程序要点Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《伺服及其控制源程序要点Word格式文档下载.docx(13页珍藏版)》请在冰豆网上搜索。
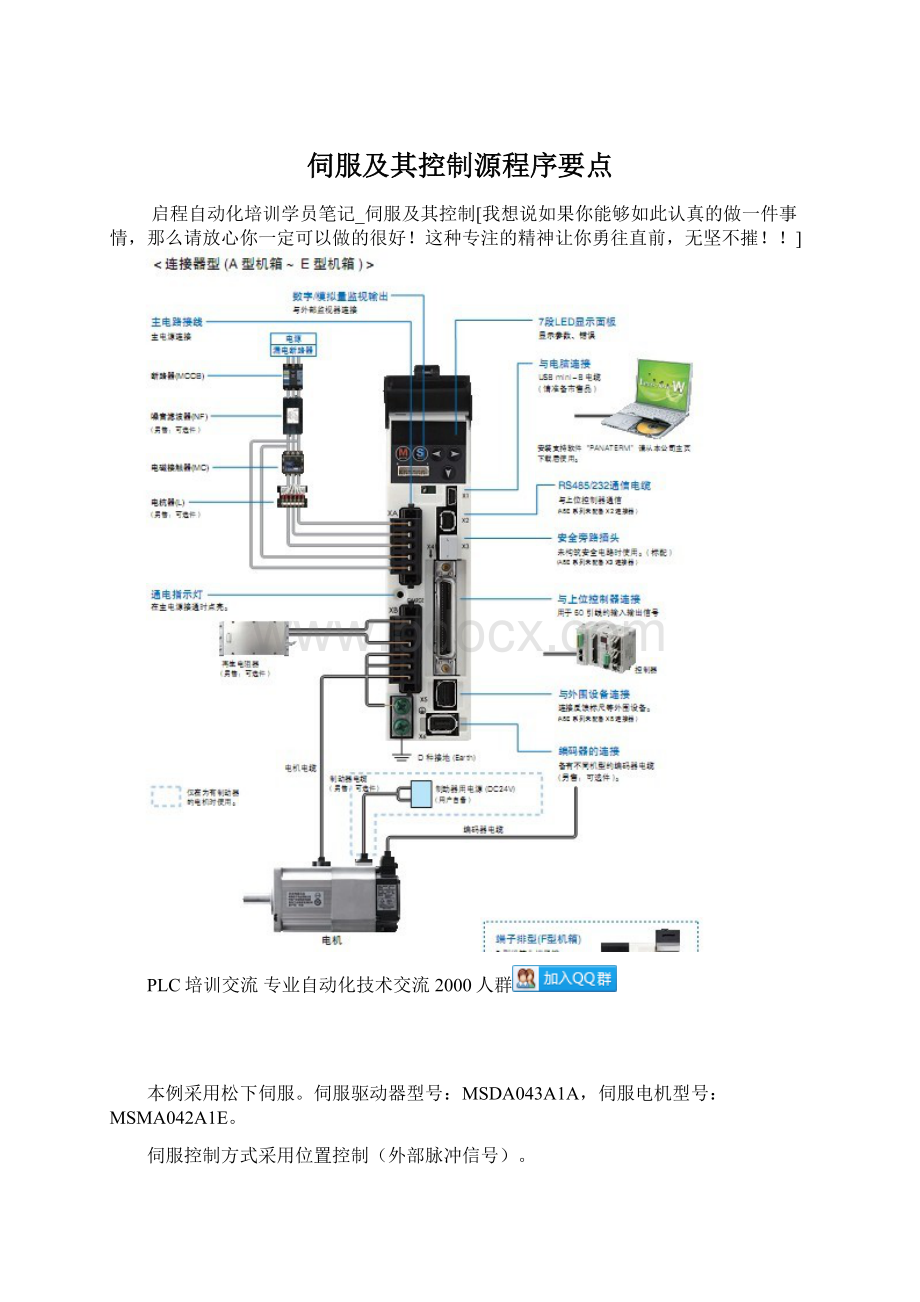
MSDA043A1A,伺服电机型号:
MSMA042A1E。
伺服控制方式采用位置控制(外部脉冲信号)。
西门子S7-200系列PLC高速脉冲输出控制伺服运动。
1伺服的接线与参数设置
1.1伺服接线
本驱动器是小功率的,可以直接接单相220V电源。
接法如图1-1所示,r与L1并接,t与L3并接。
伺服电机上有两组线,一组为电机电源线,一组为编码器线。
电机电源线一端接在伺服驱动器的U、V、W、PE端子上,颜色顺序为红、白、黑、绿,PE为接地端调试时可以不接,另一端插在电机的引出接口上(四孔);
编码器线一端直接插在如图1-2所示的伺服驱动器的CNSIG位置,另一端插在电机的引出接口上(十五孔)。
图1-1驱动器单相电源接线图
图1-2伺服外观及外部接口说明
1.2控制接口的接线端子定义
控制接口连接线的一端插在如图1-3所示的伺服驱动器的CNI/F接口上,另一端接外部电路。
本例采用位置控制方式(外部接线),需要用到的端子在图中已经圈画出来。
其中:
端子7:
24V电源正,粉色;
端子29:
伺服使能,灰红色;
端子41:
24V电源地,姜黄色;
端子3:
脉冲输入正,棕色;
端子4:
脉冲输入负,橙色;
端子5:
方向输入正,红色;
端子6:
方向输入负,黄色。
图1-3伺服驱动器位置控制接线图
1.3伺服与S7-200的连接
伺服与S7-200的连接接线方式如图1-4所示,图中Q0.0为高速脉冲输出,Q0.2为伺服方向控制。
图1-4伺服与S7-200的连接图
1.4伺服参数设置
表1-1需要设置的伺服参数表
参数号
参数
值
功能
PR_r02
控制方式选择
位置控制
PR_r40
指令脉冲倍频设定
1
倍频X1
PR_r41
指令脉冲逻辑取反
不取反
PR_r42
指令脉冲输入方式选择
3
脉冲+方向
按SET键进入模式选择状态,按MODE进行选择模式,找到PR_r00参数组。
按上方向键进行数值增加,下方向键进行数值减小,左方向键进行移位,SET键进入设定。
参数设定完后,进行参数设定确认写入驱动器,找到EE_Set模式,按SET键,显示EEP—,长按上方向键直至显示Finish,然后断电再上电,完成参数设置。
2PLC编写程序PLC培训交流专业自动化技术交流2000人群
西门子S7-200系列PLC编程时,其向导功能是十分强大的,本例采用向导功能对S7-200控制伺服运动进行说明。
2.1伺服速度与位置距离的计算方法
伺服可以通过外部脉冲输入的频率及脉冲的个数来实现伺服位置控制方式时的速度与旋转圈数,也就是说在PLC内编程控制PLC的高速脉冲输出端的输出脉冲频率与脉冲个数就能控制伺服进行定速、定位。
伺服旋转一周究竟需要多少个脉冲数呢?
这个与伺服电机的编码器的线数有关,如图2-1所示伺服电机MSMA042A*的编码器是2500线的,由于伺服电机编码器反馈到伺服驱动器的脉冲是4倍分频,所以要伺服转一圈所需的脉冲数等于伺服编码器的线数乘以4,也就说PLC向MSDA043A1A发送10000个脉冲伺服旋转一圈。
伺服旋转一圈所需的脉冲数已经得知,伺服的速度也就很容易计算出来,以每秒10000个脉冲的速度发送脉冲就相当于伺服一秒旋转一转。
图2-1驱动器与电机匹配表
2.2向导配置说明
打开脉冲输出向导PTO/PWM,对其进行配置。
以下用图片进行说明向导配置的步骤。
图2-2向导目录
图2-3脉冲输出端选择
图2-4脉冲输出方式选择
图2-5伺服最高速度、启动停止速度设置
图2-6伺服加减速时间设置
图2-7运动包络的定义
图2-8为配置分配存储区
图2-9完成向导配置
2.3程序说明
子程序PTO0_CTRL为初始化子程序,必须要有。
PTO0_MAN与PTO0_RUN可以根据需求选择使用。
图2-10初始化子程序
子程序PTO0_MAN为手动控制模式,只能控制速度,其RUN端接通,Q0.0就会按照Speed端所给的脉冲频率一直发送脉冲,直到RUN端断开。
图2-11手动控制子程序
子程序PTO0_RUN为位置控制模式。
START端接通一个扫描周期,Q0.0会按照Profile所选择的包络的速度进行发送脉冲,包络中所设置的脉冲个数发送完毕后就会停止发送。
若START端一直接通,Q0.0发送完一轮后会接着发送下一轮,直到START端断开时正在发送的那一轮发送完毕。
Profile端地址用来选择使用你所设定的哪一个包络。
Abort端为模块终止端,当Abort端为1时,Q0.0会减速停止发送脉冲。
图2-12位置控制子程序
伺服运动方向控制配合PTO0_MAN与PTO0_RUN使用,当Q0.2接通时,伺服反转。
图2-13伺服运动方向控制
 升级会员
升级会员 