海底隧道钻机控制系统设计西电Word文档格式.docx
《海底隧道钻机控制系统设计西电Word文档格式.docx》由会员分享,可在线阅读,更多相关《海底隧道钻机控制系统设计西电Word文档格式.docx(23页珍藏版)》请在冰豆网上搜索。
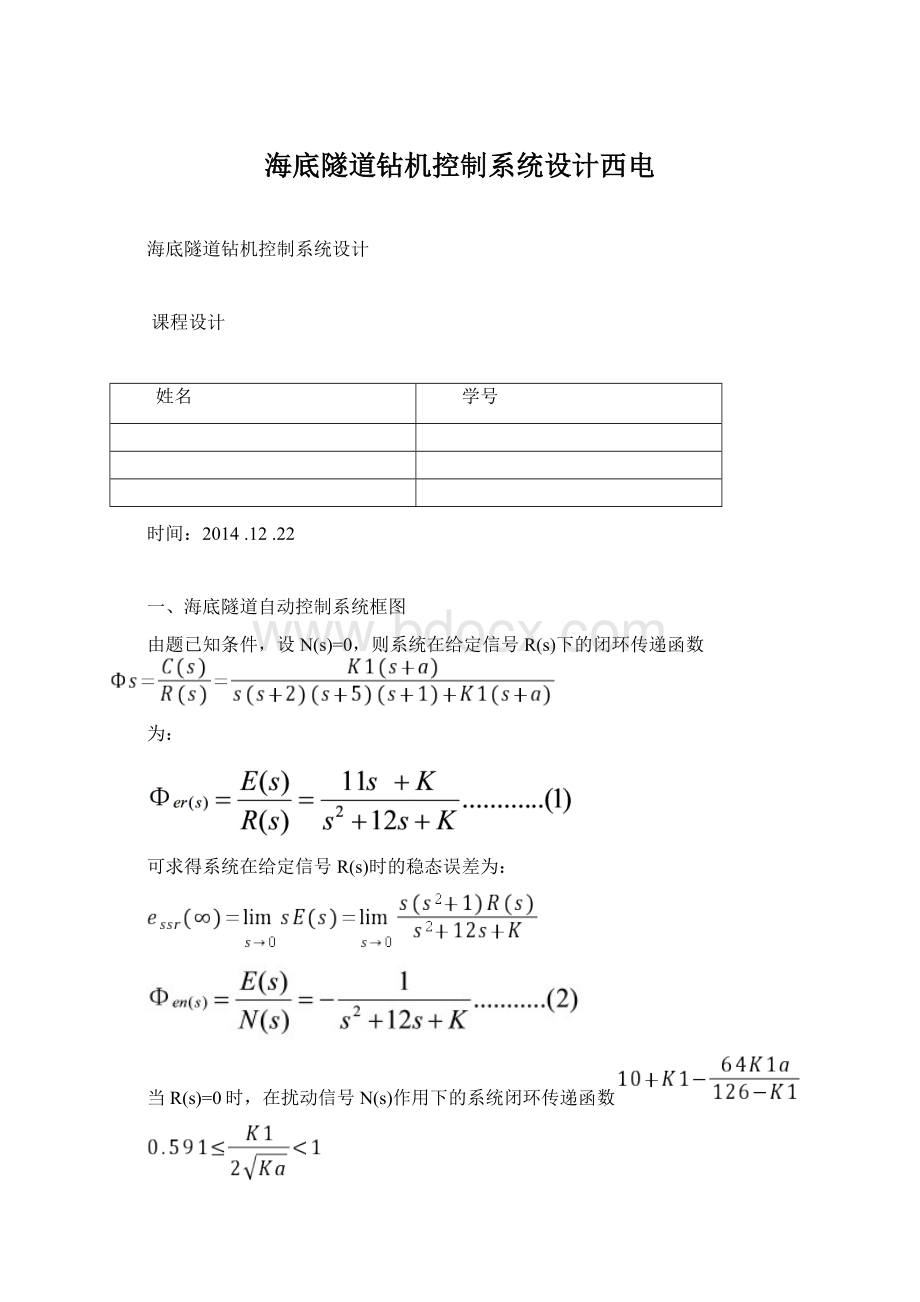
可求得系统在给定信号R(s)时的稳态误差为:
当R(s)=0时,在扰动信号N(s)作用下的系统闭环传递函数
到此可求得系统在扰动信号N(s)作用下的稳态误差为:
由
(1),
(2)两式可得在R(s)和N(s)作用下系统的输出为:
二、接下来根据不同的K值MATLAB绘制时域仿真曲线
在单位阶跃输入的N(s),R(s)时有:
此时的输入稳态误差和扰动稳态误差为:
在这里我取K值分别为1,20,60,100,120,150,单位阶跃输入以及单位阶跃扰动下的系统框图和响应分别为(Δ=2):
(注:
由系统的稳定性和闭环传递函数可知,极点必须位于s左半平面,故K值必须大于0)
下面的分析中将输入响应和扰动响应进行分开讨论。
(1)K=1系统的模拟框图为:
在N(s)=0时得到的单位阶跃响应曲线,如下图:
容易看出此时系统调节时间达到二十五秒左右,不能满足题目要求。
此时系统响应没有超调。
令R(s)=0时,在扰动信号N(s)作用下得阶跃响应曲线,如下图:
此时系统的扰动稳态误差为-1。
K=1不能满足系统的响应时间为5s,精度为0.01的标准。
(2)K=20系统的模拟框图为:
此时系统的调节时间为0.92s,超调量为4%。
此时系统的扰动稳态误差为-0.05,仍然无法满足系统精度要求。
由扰动稳态误差可知,只有当K=100的时候,才能满足精度要求。
(3)K=60系统的模拟框图为:
此时的调节时间为0.65s,超调量为15%。
此时系统的扰动稳态误差为-0.0167,仍然无法满足系统精度要求。
(4)K=100系统的模拟框图为:
此时的调节时间为0.66s,超调量为22%。
此时系统的扰动稳态误差为-0.01,达到了系统给的精度要求。
(5)K=120系统的模拟框图为:
此时的调节时间为0.66s,超调量为25%。
此时系统的扰动稳态误差为-0.0083,达到了系统给的精度要求。
(6)K=150系统的模拟框图为:
此时的调节时间为0.62s,超调量为28%。
此时系统的扰动稳态误差为-0.0067,达到了系统给的精度要求。
三、将各响应曲线通过编程反应在一张图当中进行比较。
(一)下面将K取值分别为1,20,,60,100,120,150的单位阶跃输入(N(s)=0)的响应利用matlab编程表达在一张图中。
Matlab编程:
响应图为:
(二)K取值分别为1,20,,60,100,120,150的单位阶跃扰动(R(s)=0)的响应利用matlab编程表达在一张图中。
由以上分析,得出下面表格:
增益K
超调量σ%
调节时间(Δ=2%)
输入稳态误差
扰动稳态误差
1
-
25
-0.1
20
4%
0.92
-0.05
60
15%
0.65
-0.0167
100
22%
0.66
-0.01
120
25%
-0.0083
150
28%
0.62
-0.0067
注:
N(s)和R(s)均为单位阶跃输入
从表中可以看出,随着K值的增大超调量在不断的增大,扰动稳态误差(单位阶跃输入和单位阶跃扰动的稳态误差之和)不断的减小,调节时间在减小,但当K值达到60以后调节时间的变化不大。
为了满足题目要求的响应时间小于5s,精度达到0.01,同时超调量在相对比较合理范围时,在这里K值取值在100到150之间比较好。
为了讨论方便,接下来取K≥100进行频域分析和离散化仿真。
K值取100时的闭环系统的零、极点图为
由图中可以看出闭环零、极点的值,极点位于左半平面系统是稳定的。
四、频域仿真
(1)K值为100时,用matlab绘制系统的bode图:
Matlab程序:
由以上值可以看出,系统图的截止频率Wc=Wcp=13.2898rad/s,相角裕量ϒ=Pm=59.9290º
,从下图看到相频特性曲线并没有穿过-л,故相角穿越频率Wg=Wcg不存在,幅值裕量为无穷大。
系统的bode图:
K=100时系统的nyquist图为:
(2)K值为120时,用matlab绘制系统的bode图:
此时,系统图的截止频率Wc=Wcp=13.9343rad/s,相角裕量ϒ=Pm=56.0476º
,从上图看到相频特性曲线并没有穿过-л,故相角穿越频率Wg=Wcg不存在,幅值裕量为无穷大。
K=120时系统的nyquist图为:
(3)K值为150时,用matlab绘制系统的bode图:
此时,系统图的截止频率Wc=Wcp=14.8847rad/s,相角裕量ϒ=Pm=51.3497º
K=150时系统的nyquist图为:
比较K=100,120,150,相频特性曲线都没有穿过-л,因此通的稳定性还是很好的,随着K值增大Wc不断增大,系统的快速性不断提高。
五、系统的离散化仿真设计
对于系统的离散化仿真设计,在这里只取K值为100进行仿真分析,当K取大于100的其他值时,可以通过同样的方式得出。
与时域相对应,只有输入和只有扰动输入的情况下,先对传递函数做Z域变换:
在这里采样周期取0.1s
取采样周期为0.1s时
只有输入时的响应为:
只有扰动的响应为:
从系统的离散化仿真中可以看出,离散化仿真与时域仿真相对应,只要采样周期T取的值足够小,响应图中看到的曲线几乎是和时域图中看到的曲线一模一样。
六、心得体会
(1)钻机控制系统的仿真设计,感觉K值的限定条件有点少,在精度为0.01rad的条件下,K值一般都能满足响应时间(<
5s)的要求,而系统的稳定性也能够得到满足,这样就只能通过超调量的大小来判断K值在哪个范围内比较合适。
还有就是从系统的bode图中,无法判断不同K值系统稳定性的好坏,可能是这方面懂的不是很多。
在这里只用了时域和频域方法进行仿真,对于作业要求中的复域方法进行仿真没有去做,这方面没有学习。
(2)本次控制系统进行仿真的关键部分我认为是对系统框图的输入和输出部分进行分开处理,即系统框图的分解,但是在频域仿真时没有对干扰项做单独的开环频域仿真,只进行了输入项的开环频域分析,觉得这样的处理没太大必要。
在分析每一种K值下的系统的变化时,总感觉处理的信息不够,要么就是分析的过于简洁,不知道该再在哪方面下手,觉得分析得出来的一些结论也没有太大的实在价值,只是做了一些皮毛处理。
(3)在这里就把对课程设计的一些建议也说了吧,总的来说课程设计的作用性和意义性是很大的,对我们而言,正是需要一些像这样自己动手操作的而且带有开放性的课题去锻炼,知识的运用和发现其实就在这些方面,从不懂到熟悉,从茫然到认知,就好像是事物的渐进过程一样,只有经历了必不可少的过程才可能有新的突破,不过这一切都要建立在我们学生对自己的认识上,也许并不是每个人都需要这样的锻炼,但这样的锻炼于每个人却是十分宝贵的,觉得课程设计这样的作业很好,没有更好的建议了。
 升级会员
升级会员 