机械原理作业.docx
《机械原理作业.docx》由会员分享,可在线阅读,更多相关《机械原理作业.docx(22页珍藏版)》请在冰豆网上搜索。
机械原理作业
机械原理习题
第2章平面机构的结构分析
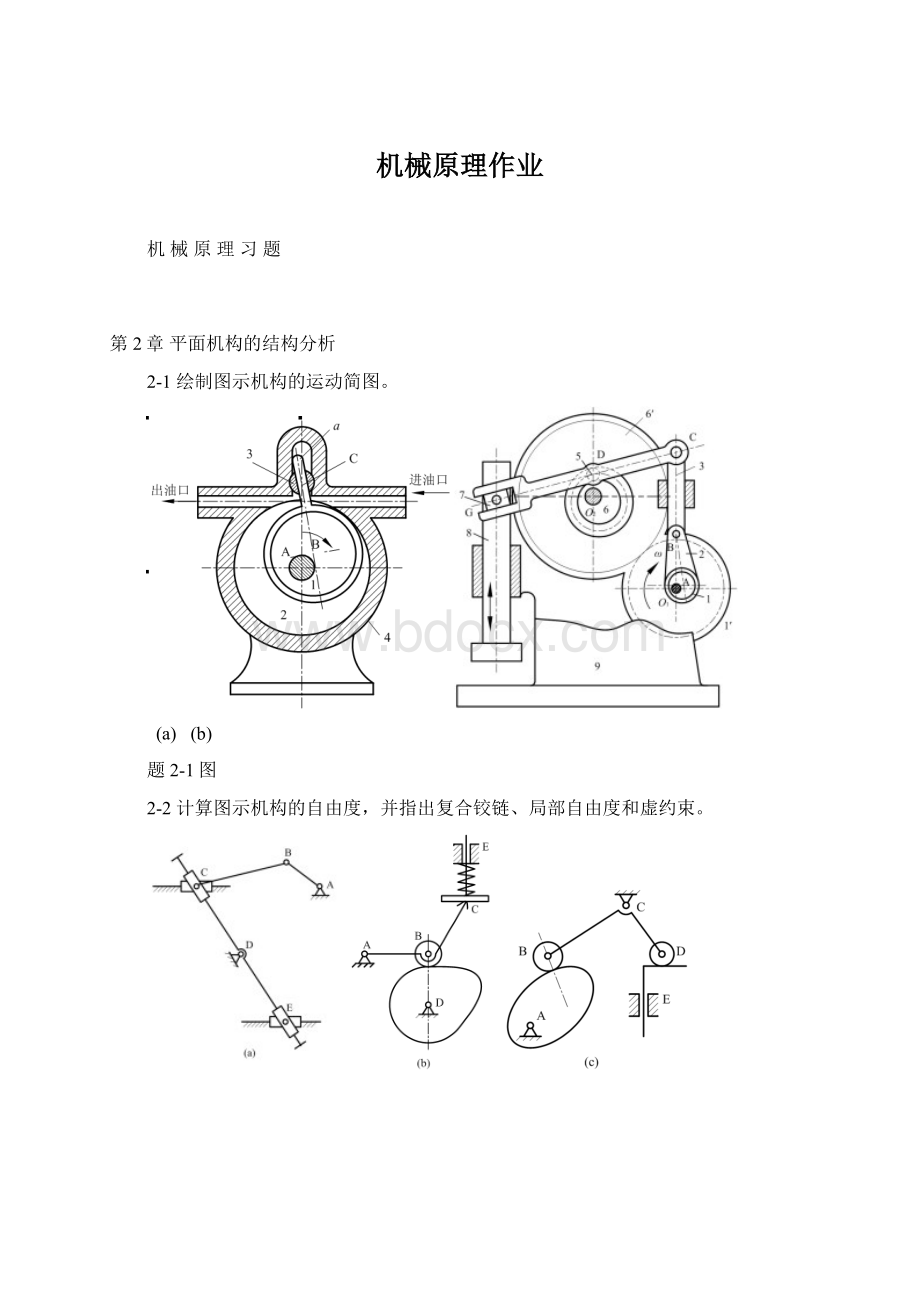
2-1绘制图示机构的运动简图。
(a)(b)
题2-1图
2-2计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
题2-2图
2-3计算刹车机构在刹车进程中的自由度。
题2-3图
2-4计算图示机构的自由度,并判定机构运动是不是确信。
假设存在复合铰链、局部自由度或虚约束,请指出。
(a)(b)
题2-4图
2-5判定图示机构设计是不是正确。
若不正确,提出修改方案。
题2-5图
2-6填空题
1)在平面机构中具有一个约束的运动副是副。
2)使两构件直接接触并能产生必然相对运动的连接称为。
3)平面机构中的低副有副和副两种。
4)机构中的构件可分为三类:
固定构件(机架)、原动件(主动件)、件。
5)在平面机构中假设引入一个高副将引入个约束。
6)在平面机构中假设引入一个低副将引入个约束。
7)在平面机构中具有两个约束的运动副是副和副。
2-7判定题
1)具有局部自由度的机构,在运算机构的自由度时,应当第一除去局部自由度。
()
2)具有虚约束的机构,在运算机构的自由度时,应当第一除去虚约束。
()
3)虚约束对运动不起作用,因此是多余的。
()
4)假设两构件之间组成两个导路平行的移动副,在计算自由度时应算作两个移动副。
()
5)假设两构件之间组成两个轴线重合的转动副,在计算自由度时应算作两个转动副。
()
6)六个构件组成同一回转轴线的转动副,那么该处共有五个转动副。
()
7)当机构的自由度F>0,且等于原动件数,那么该机构具有确信的相对运动。
()
8)虚约束对机构的运动有限制作用。
()
2-8选择题
1)机构中的构件是由一个或多个零件所组成,这些零件间()产生相对运动。
A.能够B.不能C.不必然能
2)原动件的自由度应为()。
A.0B.1C.2
3)在机构中原动件数量()机构的自由度数且大于0时,该机构具有确信的运动。
A.大于B.等于C.小于
4)由K个构件汇交而成的复合铰链应具有()个转动副。
A.K-1B.KC.K+1
5)一个作平面运动的自由构件有()个自由度。
A.1B.3C.6
6)通过点、线接触组成的平面运动副称为()。
A.转动副B.移动副C.平面高副
7)通过面接触组成的平面运动副称为()。
A.低副B.高副C.移动副
8)平面运动副的最大约束数是()。
A.1B.2C.3
第3章平面机构的运动分析
3-1试确信图示各机构在图示位置的瞬心位置。
题3-1图
3-2在图示四杆机构中,=60mm,=90mm,==120mm,=10rad/s,试用瞬心法求:
(1)当=45°时,点C的速度;
(2)当=165°时,构件2的线上(或其延长线上)速度最小的一点E的位置及其速度大小;
(3)当=0时,角之值(有两个解)。
题3-2图
3-3试用瞬心法求齿轮1与齿轮3的传动比ω1/ω3。
题3-3图
3-4试判定图示两机构中构件的B点是不是都存在哥氏加速度?
又在何位置时哥氏加速度为零?
(a)(b)
题3-4图
3-5如下图机构中,各构件尺寸已知,构件1以角速度匀速回转,求要求写出必要的矢量方向式,并画出速度与加速度多边形(比例尺自定)。
题3-5图
3-6如下图机构中,各构件尺寸已知,构件1以角速度匀速回转。
求要求写出必要的矢量方向式,并画出速度与加速度多边形(比例尺自定)。
题3-6图
3-7图示机构中1为原动件,=常数,各构件尺寸已知。
试求及。
要求列出矢量方程式,画出速度图和加速度图(比例尺任选)。
题3-7图
3-8对图示机构进行运动分析。
已知:
rad/s,mm,mm,mm。
(1)绘制时的速度多边形,并求
(1)绘制时的加速度多边形,并求
题3-8图
3-9填空题
1)速度瞬心是两刚体上为零的重合点。
2)当两构件组成回转副时,其相对速度瞬心在。
3)当两构件不直接组成运动副时,其瞬心位置用确信。
3-10判定题
1)瞬心是两构件上瞬时绝对速度为零的重合点。
()
2)利用瞬心既能够求机构的速度,又能够求加速度。
()
3-11选择题
1)构件2和构件3组成移动副,那么有关系()。
A.,B.,
C.,D.,
2)在两构件的相对速度瞬心处,瞬时重合点间的速度应有( )。
A.两点间相对速度为零,但两点绝对速度不等于零
B.两点间相对速度不等于零,但其中一点的绝对速度等于零
C.两点间相对速度不等于零且两点的绝对速度也不等于零
D.两点间的相对速度和绝对速度都等于零
3-12简答题
1)什么叫速度瞬心?
绝对速度瞬心和相对速度瞬心有什么区别?
2)机构运动分析包括哪些内容?
对机构进行运动分析的目的是什么?
3)在进行机构运动分析时,速度瞬心法的优势及局限是什么?
4)什么叫三心定理?
5)速度瞬心法一样适用于什么场合?
可否利用速度瞬心法对机构进行加速度分析?
6)哥氏加速度在什么情形下产生?
其方向任何确信?
第4章平面机构的力分析
4-1图示为一颚式破碎机在破碎矿石时要矿石不至被向上挤出,试问角应知足什么条件?
题4-1图
4-2填空题
1)槽面摩擦比平面摩擦力大是因为()。
2)从受力观点分析,移动副的自锁条件是();转动副的自锁条件是()。
3)三角形螺纹比矩形螺纹摩擦(),故三角形螺纹多用于(),矩形螺纹多应用于()。
4-3问答题
1)什么是自锁机构?
2)所谓自锁机构是不是确实是不能运动的机构?
3)什么是摩擦角?
移动副中总反力是如何定的?
4)什么是当量摩擦系数及当量摩擦角?
引入它们的目的是什么?
5)矩形螺纹和三角形螺纹螺纹副各有何特点?
各适用于何种场合?
6)何谓摩擦圆?
摩擦圆的大小与哪些因素有关?
7)什么缘故实际设计中采纳空心的轴端?
8)什么叫自锁?
在什么情形下移动副、转动副会发生自锁?
第5章平面连杆机构及其设计
5-1在图示铰链四杆机构中,各杆长度别离为=28mm,=52mm,=50mm,=72mm。
(1)假设取为机架,求该机构的极位夹角,杆的最大摆角和最小传动角;
(2)假设取为机架,该机构将演化成何种类型的机构?
什么缘故?
请说明这时、两个转动副是周转副仍是摆转副?
题5-1图
5-2如图示,设已知破碎机的行程速比系数=,颚板长度=300mm,颚板摆角,曲柄长度=80mm,求连杆的长度,并查验最小传动角是不是符合要求。
题5-2图
5-3曲柄滑块机构的行程H=60mm,偏距e=20mm,行程速度转变系数=,求曲柄和连杆的长度。
5-4一摆动导杆机构的行程速度转变系数=,机架的长度L=100mm,试设计此机构。
5-5在图示的四杆机构中,已知a=20mm,b=60mm,e=10mm,试确信:
1)此机构有无急回运动?
假设有,试以作图法确信极位夹角θ,并求行程速比系数K的值;
2)当以AB为原动件时,标出此机构的最小传动角γmin和最小压力角αmin;
3)作出当以滑块为原动件机会构的死点位置。
题5-5图
5-6如下图,欲设计一铰链四杆机构,已知其摇杆CD的长度LCD=75mm,行程速比系数K=,机架AD的长度为LAD=100mm,又知摇杆的一个极限位置与机架间的夹角为ψ=45º,试求曲柄的长度LAB和连杆的长度LBC。
(只需求出两解中的一个)
5-7填空题
1)平面连杆机构是由一些刚性构件用()副和()副连接组成的。
2)某些平面连杆机构具有急回特性。
从动件的急回性质一样用()系数表示。
3)对心曲柄滑快机构()急回特性。
4)偏置曲柄滑快机构()急回特性。
5)机构处于死点时,其传动角等于()。
6)机构的压力角越()对传动越有利。
7)曲柄滑块机构,当取()为原动件时,可能有死点。
5-8判定题
1)平面连杆机构可利用急回特性,缩短非生产时刻,提高生产率。
()
2)有死点的机构不能产生运动。
()
3)机构的压力角越大,传力越费力,传动效率越低。
()
4)双曲柄机构中,曲柄必然是最短杆。
()
5)平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。
()
6)平面连杆机构中,压力角的补角称为传动角。
()
5-9选择题
1)铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和()其他两杆之和。
A<=;B>=;C>。
2)铰链四杆机构中,假设最短杆与最长杆长度之和小于其余两杆长度之和,当以()为机架时,有两个曲柄。
A最短杆相邻边;B最短杆;C最短杆对边。
3)一曲柄摇杆机构,假设曲柄与连杆处于共线位置。
那么当()为原动件时,称为机构的死点位置。
A曲柄;B连杆;C摇杆。
4)当极位夹角θ()时,机构就具有急回特性。
A<0;B>0;C=0。
5)当行程速度转变系数k()时,机构就具有急回特性。
A<1;B>1;C=1。
6)假设以()为目的,那么机构的死点位置能够加以利用。
A加紧和增力;B传动。
7)压力角与传动角的关系是α+γ=()。
A180º;B45º;C90º。
5-10简答题
1)何谓“死点”?
它在什么情形下发生?
它与“自锁”在本质上有无区别?
说明“死点”的危害及其克服方式,和“死点”在机械工程中的应用情形。
2)什么叫连杆机构的急回特性?
它用什么来表达?
3)什么叫极位夹角?
它与机构的急回特性有什么关系?
4)什么叫死点?
它与机构的自由度F<=0有什么区别?
5)何谓曲柄?
四杆机构具有曲柄的条件是什么?
曲柄是不是确实是最短杆?
6)何谓行程速比系数?
何谓急回作用?
何谓极位夹角?
三者之间的关系如何?
第6章凸轮机构及其设计
6-1设计一偏置移动滚子从动件盘形凸轮机构。
凸轮回转方向和从动件初始位置如下图。
已知偏距,基圆半径,滚子半径。
从动件的运动规律如下:
,,,从动件在推程中以简谐运动规律上升,升程=30mm;回程以等加速等减速运动规律返回原处。
试用图解法绘制从动件位移线图及凸轮轮廓(要求推程和回程的分点数≥6个)。
题6-1图
6-2已知凸轮机构如下图,试在图上标注:
(1)凸轮的基圆半径;
(2)从动件的升程;
(3)推程运动角;
(4)回程运动角;
(5)远停止角;
(6)近停止角;
(7)当凸轮转过90°时,从动件的位移;
(8)当凸轮转过180°时,机构的压力角。
题6-2图
6-3已知凸轮机构如下图,试在图上标注当凸轮转过45°时,从动件的位移s和压力角。
题6-3图
6-5填空题
1)凸轮机构是凸轮、()和机架组成的高副机构。
2)凸轮机构中,凸轮与从动件的接触处,是以点或线相接触,形成()副。
3)凸轮按形状分为()凸轮移动凸轮和圆柱凸轮。
4)凸轮按形状分为盘形凸轮、()凸轮和圆柱凸轮。
5)按从动件与凸轮的接触形式可分为()从动件、滚子从动件和平底从动件三种类型。
6)按从动件与凸轮的接触形式可分为尖底从动件、()从动件和平底从动件三种类型。
7)按从动件与凸轮的接触形式
 升级会员
升级会员 