计算机持续信号脉冲信号区别Word下载.docx
《计算机持续信号脉冲信号区别Word下载.docx》由会员分享,可在线阅读,更多相关《计算机持续信号脉冲信号区别Word下载.docx(10页珍藏版)》请在冰豆网上搜索。
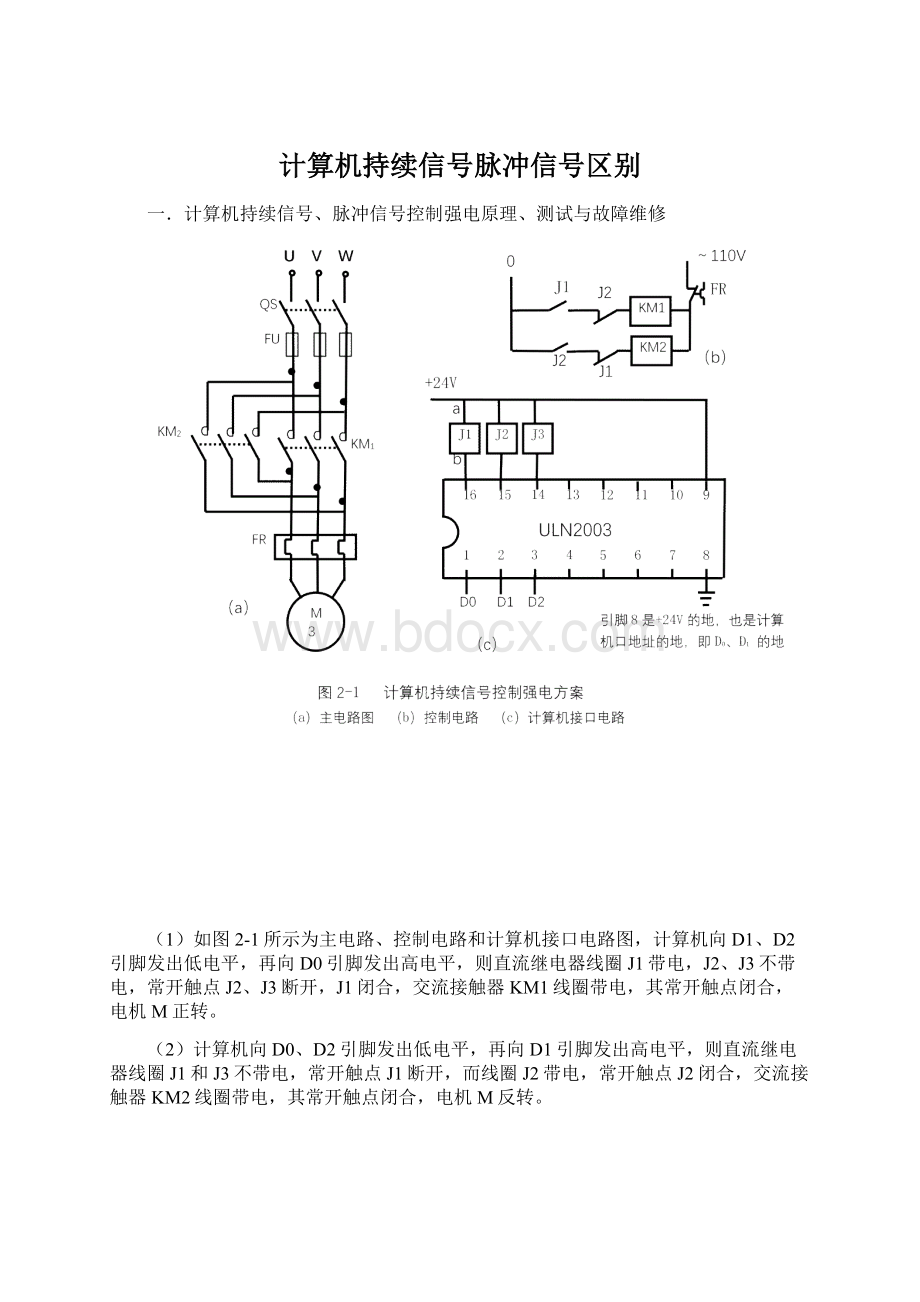
(1)如图2-1所示为主电路、控制电路和计算机接口电路图,计算机向D1、D2引脚发出低电平,再向D0引脚发出高电平,则直流继电器线圈J1带电,J2、J3不带电,常开触点J2、J3断开,J1闭合,交流接触器KM1线圈带电,其常开触点闭合,电机M正转。
(2)计算机向D0、D2引脚发出低电平,再向D1引脚发出高电平,则直流继电器线圈J1和J3不带电,常开触点J1断开,而线圈J2带电,常开触点J2闭合,交流接触器KM2线圈带电,其常开触点闭合,电机M反转。
(3)计算机向D0、D1发出低电平,向D2发出高电平,则直流继电器线圈J1、J2不带电,J3带电,常开触点J1、J2均断开,交流接触器KM1和KM2线圈均不带电,其常开触点断开,电机M停转。
持续信号控制若仅仅为了控制电机通断电,J3就没有必要接,若还有其他互锁等控制,就接上J3,数控系统设计上充分为用户提供多功能需求。
按上述三种情况计算机向D0、D1发出信号后,一直保持不变才能保证电机运行状态不变,即叫持续信号控制方案。
数控机床上计算机用持续信号控制主轴电机正转指令M03、反转指令M04、停转指令M05,其原理就是如图2-1所述的原理。
二.计算机脉冲信号控制强电方案
(1)主电路如图2-1(a),控制电路和计算机接口电路如图2-2(a)(b)所示,计算机向D1、D2引脚发出低电平后,向D0引脚发出高电平,则直流继电器线圈J2、J3不带电,而J1带电,常开触点J1闭合,交流接触器KM1线圈带电,其辅助常开触点自锁,主触点KM1闭合,电机M正转,这时再向D0位发出低电平,芯片和J1均不带电,但因自锁电机一直正转。
(2)计算机向D0、D1位发出低电平,再向D2位发出高电平,则直流继电器线圈J1、J2不带电,而J3带电,常闭触点J3断开,交流接触器KM1、KM2线圈不带电,电机M停转。
(3)计算机向D2、D0发出低电平,向D1位发出高电平,常闭触点J3和常开触点J2闭合,交流接触器KM2线圈带电,辅助常开触点KM2自锁,电机M反转,计算机再向D2位发出低电平,芯片和线圈J2均失电,但因自锁电机一直反转。
J1和J2互锁,控制程序又互锁,按上述三种情况计算机向D0、D1、D2位发出高电平后,电机运转又发低电平并且时间很短,电机运行状态不变,即叫脉冲信号控制方案。
三.采用过零型固态继电器、交流接触器的计算机控制强电原理与故障维修
如图2-4所示,固态继电器输入端接入0V,输出端就断开;
输入端接入3~32V直流电压,输出端就导通可以接通高达380V的交流电压,输入端接入3~32V由计算机控制实现,即实现了计算机控制强电,主电路如图2-1(a),控制电路和计算机接口电路原理如图2-4所示,工作原理如下:
计算机向D1位发出高电平,向D0位发出低电平,固态继电器SSR1的输出端导通,交流接触器线圈KM1带电,主触点KM1闭合,电机正转;
计算机向D0位发出高电平,向D1位发出低电平,固态继电器SSR2输出端导通,交流接触器线圈KM2带电,主触点KM2闭合,电机反转;
计算机向D1、、、D0位都发出高电平,固态继电器SSR1、SSR2输出端都不导通,交流接触器线圈KM1、KM2不带电,电机停转。
四.固态继电器的计算机控制强电的原理与故障维修
如图2-5所示,对小功率电动机,可以直接用固态继电器输出端接通三相交流电实现对电机的控制。
计算机向D0、D1、D2位发出高电平,再向D3、D4、D5位发出低电平,则固态继电器输出端SSR0、SSR1、SSR2不导通,SSR3、SSR4、SSR5导通电机正转;
计算机向D3、D4、D5位发出高电平,再向D0、D1、D2位发出低电平,则固态继电器输出端SSR3、SSR4、SSR5不导通,SSR0、SSR1、SSR2导通电机反转;
计算机向D0、D1、D2、D3、D4、D5位发出高电平,则固态继电器输出端SSR0、SSR1、SSR2、SSR3、SSR4、SSR5都不导通,电机停转。
五.基于光电隔离器、直流继电器的计算机控制强电原理与故障维修
对小功率三相交流电机,可以用图2-6所示的用直流继电器的常开触点控制电机的方案,计算机向
D1位发低电平后,再向D0发出高电平,则直流继电器线圈J2不带电,J1带电,直流继电器的常开触点J1闭合,电机M正转。
计算机向D0发出低电平,向D1位发出高电平,常开触点J2闭合,电机一直反转。
计算机向D0、D1位发出低电平,则直流继电器线圈J1、J2不带电,电机M停转。
六传感器控制强电
1.光电式传感器控制强电图2-7
2.霍尔传感器控制强电图2-8
七传感器信号读入计算机
1.行程开关信号读入计算机见图2-9
如图2-9所示,D0为计算机并行输入卡(芯片)的数据位,SL断开和闭合时,D0位状态在TTL电平的0、+5V变化,计算机CPU通过程序即可分辨出SL的状态。
2.光电式传感器信号采用分压法读入计算机见图2-10
如图2-10所示,将负载设置为两个电阻R1=1.4K、R2=2K,有物体靠近传感器时,R1电压5V、R2电压7V,当没有物体靠近传感器时,R1、、R2电压均为0V。
3.光电式传感器信号采用光电隔离法读入计算机见图2-11
如图2-11为用TLP521光电隔离器做接口电路的G18-3A10NA型光电式接近开关信号读入CPU接口电路图,其他同分压法完全一样。
4.霍尔传感器信号采用分压法和光电隔离法读入计算机见图2-12、图2-13
八.普通车床的手动控制主轴和冷却改为数控车床脉冲信号控制两电机的思路
用前述讲的ULN2003,ULN2803元件的计算机控制原理,把手动控制的按钮的常开触点改为计算机控制的直流继电器的常开触点;
把手动控制的按钮的常闭触点改为计算机控制的直流继电器的常闭触点;
就完成了手动控制改为计算机控制了,即数控化改造。
关于普通机床数控改造动力伺服系统设计改造思路
九数控车床带功能区图区的电气控制原理图案例
 升级会员
升级会员 