电力传动实验指导书文档格式.docx
《电力传动实验指导书文档格式.docx》由会员分享,可在线阅读,更多相关《电力传动实验指导书文档格式.docx(13页珍藏版)》请在冰豆网上搜索。
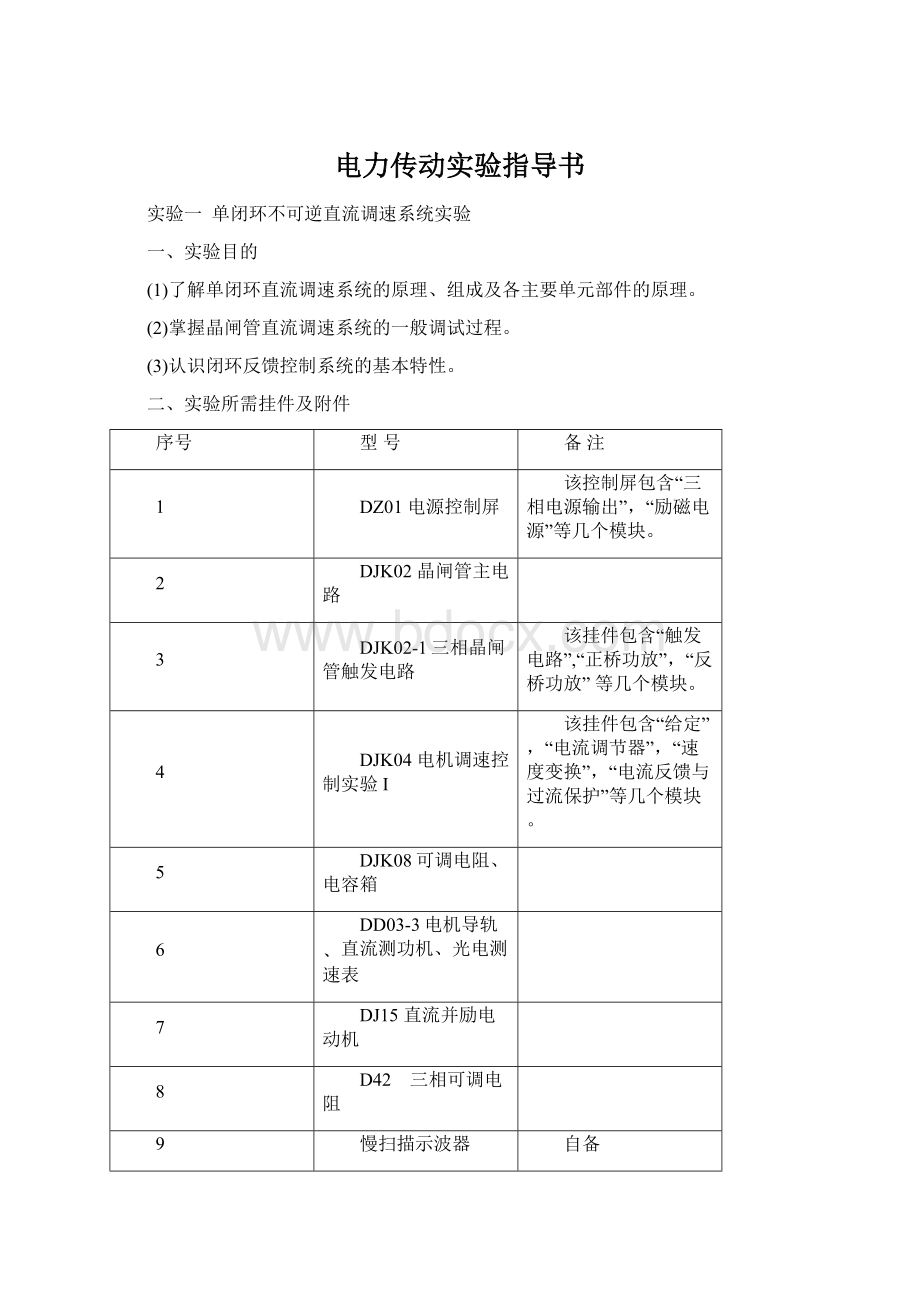
6
DD03-3电机导轨﹑直流测功机、光电测速表
7
DJ15直流并励电动机
8
D42 三相可调电阻
9
慢扫描示波器
自备
10
万用表
三、实验线路及原理
图1转速单闭环系统原理图
为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。
对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。
按反馈的方式不同可分为转速反馈,电流反馈,电压反馈等。
在单闭环系统中,转速单闭环使用较多。
转速单闭环不可逆直流调速系统采用光码盘作测速反馈,反馈电压经“速度变换”后接到“速度调节器”的输入端,与“给定”的电压相比较经放大后,得到移相控制电压UCt,用作控制整流桥的“触发电路”,触发脉冲经功放后加到晶闸管的门极和阴极之间,以改变“三相全控整流”的输出电压,这就实现了直流电动机在额定磁通下的调压调速。
电机的转速随给定电压变化,电机最高转速由速度调节器的输出限幅所决定,速度调节器采用P(比例)调节对阶跃输入有稳态误差,要想消除上述误差,则需将调节器换成PI(比例积分)调节。
当“给定”恒定时,闭环系统对电机负载或电源电压波动引起的速度变化起到了抑制作用,电机的转速以一定的精度稳定在某一速度上。
四、实验内容
(1)学习DZ01“电源控制屏”的使用方法。
DJK02-DJK02-1上的“触发电路”调试。
(2)Uct不变时直流电动机开环特性的测定。
(3)DJK04上的基本单元的调试。
(4)转速单闭环直流调速系统静特性测定。
五、预习要求
(1)复习电力传动自动控制系统教材中有关晶闸管直流调速系统、闭环反馈控制系统的内容。
(2)掌握调节器P、PI的控制规律。
(3)根据实验原理图,定性分析电动机的跟随性能及抗扰动性能。
(4)实验时,如何能使电动机的负载从空载(接近空载)连续地调至额定负载?
六、实验方法
1、DJK02和DJK02-1上的“触发电路”调试
①打开DZ01总电源开关,操作“电源控制屏”上的“电压指示切换”置于“三相电网输入”,观察输入的三相电网电压是否平衡。
然后置“三相电网输出”,启动,调U=200V,停机。
②用10芯的扁平电缆,将DJK02的“三相同步信号输出”端和DJK02-1“三相同步信号输入”端相连,打开DJK02-1电源开关,拨动“触发脉冲指示”钮子开关,使“窄”的发光管亮。
③将DJK04上的“给定”输出Ug直接与DJK02-1上的移相控制电压Uct相接,将DJK04上的给定开关S2拨到“停止”位置(即Uct=0),调节DJK02-1上的偏移电压电位器RP,用双踪示波器观察A相同步电压信号和“双脉冲观察孔”VT1的输出波形,使α=120°
。
④把DJK04板“(G)给定”模块上的开关S1置于“正给定”,S2置于“运行”,打开DJK04电源开关,调节给定电位器RP1,观测DJK02-1上“脉冲观察孔”的波形,看触发脉冲的移动情况。
最后,将RP1逆时针旋到底,使触发脉冲重新回到α=120°
⑤用8芯的扁平电缆,将面板DJK02-1面板上的“触发脉冲输出”和“触发脉冲输入”相连,使得触发脉冲加到正反桥功放的输入端。
⑥关闭DJK02-1的电源,将DJK02-1面板上的Ulf端接地,用20芯的扁平电缆,将DJK02-1的“正桥触发脉冲输出”端和DJK02“正桥触发脉冲输入”端相连,并将DJK02“正桥触发脉冲”的六个开关拨至“通”,观察正桥VT1~VT6晶闸管门极和阴极之间的触发脉冲是否正常。
2、Uct不变时的直流电机开环外特性的测定
①按图1连接回路,不接反馈。
DJK02-1上的移相控制电压Uct由DJK04上的“给定”输出Ug直接接入。
直流测功机接负载电阻R1用D42上的可调电阻450Ω(两个900Ω并联),Ld用DJK02上200mH,将DJK04上的“(Ug)给定”的输出调到零。
②先闭合励磁电源开关,按下DZ01“电源控制屏”启动按钮,观察整流电压输出。
然后从零开始逐渐增加“给定”电压Ug,观察整流电压和转速的变化,电动机慢慢启动并使转速n达到1200rpm。
③减小负载电阻R的阻值(即增加负载转矩),使电机的电枢电流从空载直至Ied=1.0A。
即可测出在Uct不变时的直流电动机开环外特性n=f(Id),测量并记录数据于下表:
n(rpm)
Id(A)
停机,R1调最大。
3、DJK04上的基本单元部件调试
①移相控制电压Uct调节范围的确定
直接将DJK04“给定”电压Ug接入DJK02-1移相控制电压Uct的输入端,接成开环形式。
当给定电压Ug由零调大时,Ud将随给定电压的增大而增大,当U1超过电动机额定电压220V时,记录Ug'。
一般可确定移相控制电压的最大允许值为Uctmax=0.9Ug',即Ug的允许调节范围为0~Uctmax。
如果我们把输出限幅定为Uctmax的话,则“三相全控整流”输出范围就被限定,不会工作到极限值状态,保证六个晶闸管可靠工作。
记录Ug'于下表中:
Ug'
Uctmax=0.9Ug'
将给定退到零,再按“停止”按钮,结束步骤。
②(ASR)速度调节器的限幅调整
短接1、2、3端,调节DJK04中“ASR速度调节器”上的可调电位器RP3,使ASR输出为零。
再将DJK08中的可调电阻R1=40K接到“速度调节器”的“4”、“5”两端,用导线将“5”、“6”短接,使“调节器”成为P(比例)调节器。
把“速度调节器”的“5”、“6”短接线去掉,将DJK08中的可调电容0.47uF接入“5”、“6”两端,使调节器成为PI(比例积分)调节器,将速度调节器的所有输入端的接地线去掉,然后将DJK04的给定输出端接到转速调节器的“3”端,当加Ug=+5V的正给定电压时,调整负限幅电位器RP2,使之输出电压为最小值即可;
把“(G)给定”上的开关S1置于“负给定”,调节RP2使输入端加Ug=-5V负给定时,调整正限幅电位器RP1,使速度调节器的输出正限幅为Uctmax。
③转速反馈系数的整定
将“(G)给定”上的开关S2置于“正给定”。
直接将“给定”电压Ug接DJK02-1上的移相控制电压Uct的输入端,“三相全控整流”电路接直流电动机负载,Ld用DJK02上的200mH,给定电位器RP1向左旋到底,输出给定调到零。
将光码测速反馈的“转速输出”按正负极分别接DJK04的“速度变换”的1、2端,按下启动按钮,接通励磁电源,调节RP1从零逐渐增加给定,使电机提速到n=150Orpm时,调节“速度变换”上转速反馈电位器RP1,使得该转速时反馈电压Ufn=+6V,这时的转速反馈系数α=Ufn/n=0.004V/(rpm)。
4、转速单闭环直流调速系统静特性测定
①在本实验中,DJK04的“给定”电压Ug为负给定,S2置于“负给定”,给定输出调到零,1(Ug)接(ASR)速度调节器给定端3(Usr)。
转速反馈为正电压,(FBS)速度变换器3端接(ASR)的2(Ufn)端。
5、6端短接(P调节器)。
②直流并励测功机先轻载,即负载电阻最大(R1=450Ω),从零开始逐渐调大“给定”电压Ug,使电动机的转速接近n=l200rpm。
③减小负载电阻R1即增加直流电动机的负载,测出电动机的电枢电流Id,和电机的转速n,直至Id=Ied,即可测出系统静态特性曲线n=f(Id)。
④将DJK04上的“(ASR)速度调节器”的“5”、“6”短接线去掉,将DJK08中的可调电容C1=0.47uF接入“5”、“6”两端,使调节器成为PI(比例积分)调节器,再调节负载电阻R1,测量静态特性曲线n=f(Id)。
七、实验报告
(1)根据实验数据,画出Uct不变时直流电动机开环机械特性。
(2)根据实验数据,画出转速单闭环直流调速系统P、PI调节的机械特性。
(3)比较以上各种机械特性,并做出解释。
八、思考题
(l)P调节器和PI调节器在直流调速系统中的作用有什么不同?
(2)调节什么元件能改变转速反馈的强度?
本实验中,为什么在电动机转速n=1500rpm时,要将反馈电压调节到+6V?
(3)改变“速度调节器”的电阻、电容参数,对系统有什么影响?
九、注意事项
(1)双踪示波器有两个探头,可同时观测两路信号,但这两探头的地线都与示波器的外壳相连,所以两个探头的地线不能同时接在同一电路的不同电位的两个点上,否则这两点会通过示波器外壳发生电气短路。
为此,为了保证测量的顺利进行,可将其中一根探头的地线取下或外包绝缘,只使用其中一路的地线,这样从根本上解决了这个问题。
当需要同时观察两个信号时,必须在被测电路上找到这两个信号的公共点,将探头的地线接于此处,探头各接至被测信号,只有这样才能在示波器上同时观察到两个信号,而不发生意外。
(2)电机启动前,应先加上电动机的励磁,才能使电机启动。
在启动前必须将移相控制电压调到零,使整流输出电压为零,这时才可以逐渐加大给定电压,不能在开环或速度闭环时突加给定,否则会引起过大的启动电流,使过流保护动作,告警,跳闸。
(3)通电实验时,可先用电阻作为整流桥的负载,待确定电路能正常工作后,再换成电动机作为负载。
(4)在连接反馈信号时,给定信号的极性必须与反馈信号的极性相反,确保为负反馈,否则会造成失控。
(5)直流电动机的电枢电流不要超过额定值使用,转速也不要超过1.2倍的额定值。
以免影响电机的使用寿命,或发生意外。
(6)DJK04与DJK02-1不共地,所以实验时须短接DJK04与DJK02-1的地。
实验二双闭环控制的直流脉宽调速系统(H桥)
(1)了解PWM全桥直流调速系统的工作原理。
(2)分析电流环与速度环在直流调速系统中的作用。
编号
备注
1.
2.
3.
DJK09单相调压与可调负载
4.
DJK17双闭环H桥DC/DC变换直流调速系统
5.
6.
7.
8.
9.
本实验系统的主电路采用受限单极性PWM控制方式,其中主电路由四个IGBT管构成H桥,通过控制IGBT的栅极电压,用以控制IGBT管的通断,从而调节直流输出电压的幅值。
电流调节器的电流反馈量是由主回路中的电流传感器取得的。
速度反馈量取自转速表输出的电压值。
本实验系统可设定不同的给定量、速度反馈量及电流反馈量,以完成开环、速度单闭环、电流单闭环及双闭环的调速实验。
本实验系统原理框图如图1所示:
图1双闭环H桥DC/DC变换直流调速系统原理框图
(1)控制单元调试、参数整定。
(2)观测并记录电枢回路电流Id随负载电流Id改变的波形。
(3)开环电机的正、反转机械特性n=f(Id)的测定。
(4)转速单闭环电动机正、反转机械特性n=f(Id)的测定。
(5)电流单闭环电动机的正、反转机械特性n=f(Id)的测定。
(6)电流转速双闭环电动机的正、反转机械特性n=f(Id)的测定。
五、预习题
(1)在驱动脉冲形成过程中,为什么要加逻辑延时(死区)?
(2)H桥变换器的受限单极式工作模式是怎样工作的?
(3)加大转速反馈深度会对调速系统哪些指标产生影响?
(4)了解电流环、速度环在双闭环控制中各起什么作用?
(5)熟悉双闭环调速的特点
六、思考题
为什么要调节偏移电压,如果不调节或者调节的不好对闭环调速有什么影响?
七、实验方法
1、系统主电路连接
①按下图连接直流电源电路,调节“自耦调压器”的电位器,使整流输出电压U0≤230V。
②按原理图连接主电路,负载回路串入D42上的450Ω(两个900Ω并联)可调电阻。
2、开环特性测试
①偏移电压调节:
把系统接至开环,给定为0,先闭合控制电源开关,接通电动机励磁电源,按“启动”按钮,启动电动机,闭合DJK17的电源开关,调节DJK17面板上的调节偏移电压的电位器,使电机处于刚好不转的状态,即整流电压为零,断开DJK17的电源开关。
②把给定接至面板上的Un*/Uct,直流测功机的负载电阻R放在最大值,给定调到零。
先闭合控制电源的开关,接通电机励磁电源,逐渐增大正给定电压Un*,使电机启动升速,使转速达到1000rpm。
逐渐减小负载电阻R的阻值(即增大负载),使电机的电枢电流达到额定电流1A,可测出该系统的开环特性n=f(Id),记录于下表中:
把负载电阻再增至最大,给定减小至零,切断直流电源,断开励磁,判断电源,结束实验。
③当给定电压Un*为负值时,同样完成上面②中的内容,并记录于下表。
3、电流速度双闭环系统测定:
(1)系统单元调试
①电流调节器的调节:
在电流调节器的4、5之间接50KΩ电阻,把调节器的1、2、3接地,用万用表测量电流调节器的输出7(Uct)和地之间的电压,调节电位器RP3,使输出尽可能接近0V。
②电流调节器正负限幅值的整定:
在电流调节器的4和5之间接50KΩ电阻和1μf的电容,输入端2(Ui*)加-1V的给定,用万用表测量电流调节器的输出7和地之间电压,调节正的限幅值电位器RP1,使输出为4V左右,加+1V给定,调节负限幅电位器RP2,使输出为-4V。
③速度调节器调零及正负限幅值的整定同电流调节器相同。
④速度反馈输出的整定:
把给定直接接至PWM发生器,调节给定,使转速为1600r/min,调节转速调节器电位器RP1使输出3(Un)为4V。
(或1200r/min,对应3V)。
⑤电流反馈输出的整定:
一般电机限流在额定电流的1.2倍,本实验所使用电机应调节限流值为1.0A左右。
把正给定直接接至PWM发生器2(Un*/Uct)(即开环实验),转速达到1200转后,改变负载,使电机的电枢电流达到1.0A,调节电流反馈输出电位器RP1使电压值等于速度调节器的限幅值4V即可。
⑥零速封锁器观测:
首先把零速封锁器的输入悬空,开关S1拨至“封锁”状态,输出接速度或者电流调节器的零速封锁端6,无论调节器的输入如何调节,输出7始终为零。
把面板上的给定输出接至零速封锁单元其中一路,另一路悬空,增大给定,测量零速封锁单元输出端3:
给定的绝对值大于0.26V左右时,封锁端3输出-15V;
减小给定,给定的绝对值小于0.17V左右时,封锁端3输出+15V。
把给定加到另一路进行同样的操作。
(2)双闭环调速系统的调试
①原则上先单元、后系统,即先将单元的参数调好,然后才能组成系统。
先开环、后闭环,即先使系统运行在开环状态,然后再确定电流和转速均为负反馈后才可组成闭环系统。
先单环、后双环,即先使系统在电流单闭环和转速单闭环下稳定运行,然后再做电流速度双闭环。
②转速单闭环:
转速给定电压为正电压,转速反馈电压为负电压,速度调节器为PI,先构成转速单闭环,直流发电机接负载R,负载电阻调到最大值,给定调节至零(速度调节器的电阻值可调为50KΩ,电容值可调节为1μf)。
接好线后,先打开控制电源的开关,接通电机励磁电源,启动电动机,逐渐增大给定电压Un*,使电机启动升速,使转速达到1000rpm。
逐渐减小负载电阻R的阻值(即增大负载),可测出该系统的闭环特性n=f(Id),记录于下表中:
③电流单闭环:
与转速调节相同。
测定机械特性n=f(Id),记录于下表中:
④根据原理框图接线,可组成电流转速双闭环。
先把负载电阻调至最大,从零开始增大给定电压,使电动机转速达到n=1000rpm,调节负载电阻逐渐减小至零(增大负载)使电动机的电枢电流达到额定电流1A,再测定双闭环特性n=f(Id),记录于下表:
⑤降低Ug,测试n=800rpm的n,Id值,重复④的内容,记录于下表:
八、实验报告
画出上述实验中记录的各工作特性曲线n=f(zd),并比较它们的静差率。
(1)为保证系统在负反馈状态下运行,测速发电机输出电压极性与控制系统的连接必须正确。
(2)在测量电枢电流时,应将转速开关拨到“正向”,以保证示波器“地”为低电位。
(3)在Ug下调,使电机减速时,应缓慢调节。
实验三交流变频调速系统实验
(1)掌握SPWM、SVPWM及马鞍波PWM的基本原理和实现方法。
(2)测试并分析SPWM、SVPWM及马鞍波PWM调速系统的速度曲线。
DJK01电源控制屏
DJK13三相异步电动机变频调速控制
双踪示波器
三、实验方法
1、调制方式设定在SPWM方式下
(1)接通挂件电源,关闭电机开关,调制方式设定在SPWM方式下(将控制部分S、V、P的三个端子都悬空),然后开启电源开关。
(2)点动“增速”按键,将频率设定在0.5Hz,在SPWM部分观测三相正弦波信号(在测试点“2、3、4”),观测三角载波信号(在测试点“5”),三相SPWM调制信号(在测试点“6、7、8”);
再点动“转向”按键,改变转动方向,观测上述各信号的相位关系变化。
(3)逐步升高频率,直至到达50Hz处,重复以上的步骤。
(4)将频率设置为0.5HZ~60HZ的范围内改变,在测试点“2、3、4”中观测正弦波信号的频率和幅值的关系。
(5)变频调速系统:
连接三相鼠笼电机(角形接法),关闭DJK13电源,打开电机开关,再接通DJK13电源,改变频率、转向,观察电机转速变化。
磁通轨迹观测:
将示波器X、Y端分别接磁通观测的X、Y测试孔,并将示波器置于X、Y方式。
改变频率、转向,观察磁通轨迹变化情况。
2、调制方式设定在SVPWM方式下,重复1步骤。
(S、V短接,P端悬空)
3、调制方式设定在马鞍波PWM方式下,重复1步骤。
(V,P短接,S端悬空)
四、实验报告
(1)说明SPWM、SVPWM及马鞍波PWM的基本原理。
(2)分析在0.5HZ~50Hz范围内正弦波信号的幅值与频率的关系。
(3)分析频率与转速的关系。
(4)
(5)
(6)注:
合同范本有风险,使用需谨慎,法律是经验性极强的领域,范本无法思考和涵盖全面,最好找专业律师起草或审核后使用,谢谢您的关注!
(7)
(8)
(9)
(10)
 升级会员
升级会员 