机械原理第二章 平面连杆机构及其设计与分析详解文档格式.docx
《机械原理第二章 平面连杆机构及其设计与分析详解文档格式.docx》由会员分享,可在线阅读,更多相关《机械原理第二章 平面连杆机构及其设计与分析详解文档格式.docx(22页珍藏版)》请在冰豆网上搜索。
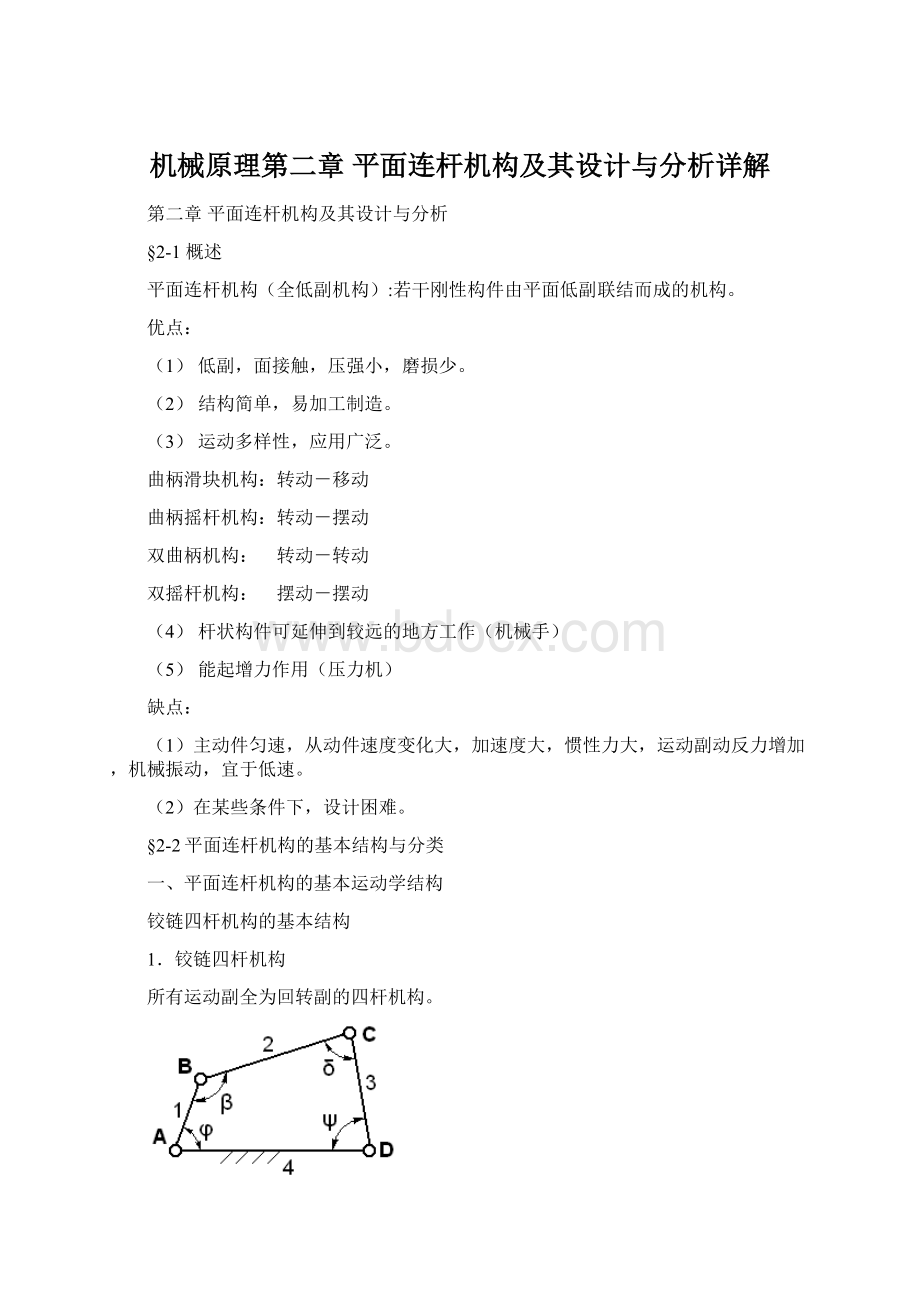
两连架杆一为曲柄,另一为摇杆的铰链四杆机构。
特点:
、
0~360°
<360°
应用:
鳄式破碎机缝纫机踏板机构揉面机
(2)双曲柄机构
两连架杆均作整周转动的铰链四杆机构。
由来:
将曲柄摇杆机构中曲柄固定为机架而得。
应用特例:
双平行四边形机构(P35),天平
反平行四边形机构(P45)
绘图机构
(3)双摇杆机构
两连架杆均作往复摆动的铰链四杆机构。
将曲柄摇杆机构中摇杆固定为机架而得。
翻台机构,夹具,手动冲床
飞机起落架,鹤式起重机
二.铰链四杆机构具有整转副和曲柄存在的条件
上述机构中,有些机构有曲柄,有些没有曲柄。
机构有无曲柄,不是唯一地由取哪个构件为机架决定,机构有曲柄的首要条件是:
机构中各构件长度间应满足一定的尺寸关系,该条件是首要条件。
然后,再看以哪个构件作为机架。
下面讨论机构中各构件长度间应满足的尺寸关系。
铰链四杆机构曲柄存在的条件
曲柄摇杆机构
考察BD间距离:
fmax=B’D=d+a,fmin=B’’D=d-a
△BCD中:
b+c≥f(b+c≥fmax), b+c≥a+d
(1)
b+f≥c(b+fmin≥c)b+d-a≥c,b+d≥a+c
(2)
c+f≥b(c+fmin≥b)c+d-a≥b,c+d≥a+b(3)
(1)+
(2)a≤d,
(1)+(3)a≤c,
(2)+(3)a≤b
有曲柄条件:
(a)最短构件与最长构件长度之和小于等于其余两构件长度之和。
(b)曲柄或机架为最短构件。
结论:
条件(a)满足
i)最短构件为连架杆,曲柄摇杆机构。
ii)最短构件为机架,双曲柄机构。
iii)最短构件为连杆,双摇杆机构。
条件(a)不满足,只能是双摇杆机构。
例:
图示铰链四杆机构,已知:
LBC=50mm,LCD=35mm
LAD=30mm,AD为机架。
(1)若此机构为曲柄摇杆机构,且AB为曲柄,求LAB的最大值。
(2)若此机构为双曲柄机构,求LAB的最小值。
(3)若此机构为双摇杆机构,求LAB的数值。
三.平面四杆机构的基本类型与演化
变换机架
曲柄摇杆机构-固定另一最短构件的相邻构件为机架→曲柄摇杆机构
固定最短构件为机架→双曲柄机构
固定最短构件的对边构件为机架→双摇杆机构
曲柄滑块机构→转动导杆机构→移动导杆机构→曲柄摇块机构(偏心泵)
扩大回转副
曲柄滑块机构→偏心轮机构
转动化为移动副曲柄摇杆机构→曲柄滑块机构
滑块导杆互换
变换运动副位置
四.平面多杆机构
在四杆机构的基本结构型式基础上,通过添加杆组得到。
牛头刨床机构,插床机构,插齿机,内燃机
2-2平面连杆机构的基本特性及运动分析
一、平面连杆机构的基本特性
1)行程速比系数
C1D-左极限,C2D-右极限,
θ-极位夹角:
从动件处于两位置,
对应曲柄轴线间所夹锐角。
Φ1=180°
+θ
摇杆:
C1→C2,工作行程
所用时间为t1,C点平均速度为V1。
Φ2=180°
-θ
C2→C1,空回行程
所用时间为t2,C点平均速度为V2。
Φ1>Φ2(ω=常数),故t1>t2,
V2>V1,机构具有急回特性。
为表征机构的急回特征,引入行程速比系数K。
急回特性取决于θ
观察机构有无急回特性
θ↑,急回作用↑,K↑
对心曲柄滑块机构、偏置曲柄滑块机构
转动导杆机构、摆动导杆机构
曲柄摇杆机构、双曲柄机构、双摇杆机构
曲柄摇杆机构K=1?
、双滑块组合机构
牛头刨床机构、插齿机、齿轮插刀加工齿轮
θ↓,急回作用↓,K↓
θ=0,无急回作用,K=1
给定曲柄摇杆机构,用作图法在图上标出极位夹角θ。
2)压力角与传动角
P-连杆BC对摇杆的作用力
Pt-P沿C点速度方向的分力
Pn-P沿垂直于速度方向的分力
α-压力角
α定义:
力的作用线与从动件上力作用点绝对速度方向间夹角。
γ-传动角,α+γ=90°
(互为余角)
Pn=Psinα,α↓,Pn↓,运动副中压力↓
Pt=Psinγ,γ↑,Pt↑,传动有利
为使机构有良好的传力性能,希望最小传动角γmin不要太小。
要求:
γmin≥[γ]
一般机械[γ]=40°
,高速大功率机械[γ]=50°
最小传动角γmin的确定:
由图知,γ=δ,δmin=γmin1,要使δ最小,须BD最短,故
γmin1的机构位置出现在B点位于AD连线上。
γmin还可能出现在B点位于B’的机构位置,此时,γ=180°
-δ,
γmin2=180°
-δmax,故
γmin=min(γmin1,γmin2)
标压力角及传动角
(1)偏置曲柄滑块机构
(2)摆动导杆机构(牛头刨床机构)
(3)摆动油缸机构
总结:
α、γ的标注
(1)由α的定义,先标压力角。
(2)γ=90°
-α,后标传动角。
(3)力P夹在α+γ=90°
的两射线中。
(P分90°
为α、γ)
3)机构的死点
力对从动件回转中心不产生力矩而顶死,使机构处于静止状态的机构位置。
即γ=0,α=90°
的机构位置。
克服死点的方法:
(1)利用多套机构将错开;
(火车前轮驱动)
(2)利用惯性,越过死点;
(装飞轮)
(3)限制摇杆摆角。
(双摇杆机构)
死点的用:
(1)飞机起落架
(2)快速夹具
二、平面连杆机构的运动分析
1、速度瞬心法
(1)瞬心的定义:
瞬心是作相对运动两刚体的瞬时等速重合点,若瞬心的速度为零,称绝对瞬心,若不为零,称相对瞬心。
(2)瞬心的数目
式中:
K-构件数N-瞬心数
(3)瞬心的求法
a)直接观察法
(I)两构件直接与回转副相连,铰链中心即为瞬心。
(II)构件2相对于构件1作平面运动,其瞬心在VA2A1和VB2B1垂线的交点上。
(III)两构件以直移副相连,瞬心在垂直于导路的无穷远处。
(IV)两构件构成高副,瞬心在位于接触点C的公法线n-n上,当两构件作纯滚,C点即为瞬心。
b)三心定理法
作平面运动的三个构件共有三个瞬心,它们位于同一直线上。
证:
①有三个瞬心
②位于同一直线(反证法)
瞬心P12、P13为已知,设连线外任意点S为瞬心P23,则
有:
即:
因:
P12为瞬心,
,P13为瞬心,
但由图知:
,故:
瞬心P23不能在连线外任意点S,只能在P12、P13连线上。
(3)瞬心法在机构速度分析中的应用
例1:
凸轮机构,求各瞬心及V2。
例2:
四杆机构,知各杆长及ω1,求各瞬心及ω3。
三心定理推广(图解)
例3:
曲柄滑块机构,知各杆长及ω1,求各瞬心及VC。
例4:
齿轮连杆机构,三个齿轮节圆作纯滚,由P13求轮1与轮3角速度比ω1/ω3。
(4)瞬心法的优缺点
作简单机构的速度分析方便、直观。
对复杂机构不易很快求得瞬心,且不能作机构加速度分析。
2、相对运动图解法
(1)同一构件上两点间的速度、加速度求法(刚体的平面运动)
基本原理:
刚体作平面运动时,可看成此刚体随基点(运动已知点)的平动(牵连运动)和绕基点的转动(相对运动)的合成。
图示铰链四杆机构,已知机构位置、各构件长度及曲柄1的角速度ω1和角加速度ε1,求连杆2的角速度ω2和角加速度ε2和E点C点的速度、加速度Vc、ac、VE、aE及ω3、ε3。
解:
1.选机构比例尺μL绘出该位置机构运动简图
2.速度分析*****3.加速度分析
讨论:
1.任意点的绝对向量都从极点指向该点,并表示同名点的绝对速度和绝对加速度。
2.连接极点以外任意两点间的向量都表示相对量,其指向与相对速度或相对加速度角标相反,如
表示
。
3.极点ρ或π表示构件上速度(加速度)为0的点。
极点ρ或π即为构件上绝对速度(绝对加速度)瞬心。
通常ρ、π不重合。
4.由于牵连运动为平动,ω、ε为绝对角速度和绝对角加速度角。
5.机构只有一个原动件时,其ω1的大小只影响图形比例尺,不影响速度图形的形状。
当ε1=0,也不影响加速度图形的形状。
6.相似原理:
构件BCE和图形bce及b’c’e’相似,且字母顺序相同。
称
图形bce为构件BCE的速度影像
图形b’c’e’为构件BCE的加速度影像
用处:
已知同一构件上不同两点的速度、加速度的大小方向,利用相似原理作相似图形且字母顺序一致,可直接求出该构件上第3点的速度和加速度大小、方向。
注
1.相似原理仅适用于同一构件上的不同点,而不适用于不同构件上的点。
2.速度多边形用小写字母,加速度多边形用小写字母加“’”、“’’”表示,机构用大写字母表示。
(2)构成移动副的两构件重合点的速度、加速度求法(点的复合运动)
点的绝对运动是牵连运动和相对运动的合成。
机构如图示,已知机构位置、各构件长度及曲柄速度ω1,求构件3的ω3和ε3。
1.速度多边形,求ω3
大小?
ω1LAB?
方向⊥BC⊥AB//导路BC
2.加速度多边形,求ε3
大小
?
方向B→C⊥BCB→A⊥BC//导路BC
-科氏加速度
大小:
,
-牵连角速度
方向:
沿
转90度
产生条件:
牵连运动为转动,相对运动为移动。
机构如图示,现已作出部份速度、加速度多边形。
在已给的多边形及机构图上求:
1)构件1、2、3上速度为Vx的点X1、X2、X3;
2)构件2上加速度为0的点Q的位置,并求VQ;
3)构件2上速度为0的点I的位置,并求aI;
解3)构件2上速度为0的点I的位置,并求aI;
分析图示机构求
的思路
求
解步骤:
VB=LABω1已知
B→C→E
↓↓
F3→F5(F4)
求C点:
第1类基本原理:
求E、F3点,相似原理:
由B、C点,求E点;
由C、D点,求F3点;
求F5(F4)点:
第1类、2类基本原理综合应用。
大小?
∨?
?
方向?
∨⊥FE∨//导路?
机构如图示,求C3点速度(扩大构件法)
3)机构运动分析解析法(课程设计讨论)
(1)回路法;
(2)计算机模块化法
2-4平面连杆机构的运动学尺寸综合
平面连杆机构设计的基本问题
1.实现刚体给定位置的设计(刚体引导)
双摇杆机构(翻台机构)
2.实现预期运动规律
正弦机构(函数发生器)
急回运动:
摆动导杆机构、曲柄摇杆机构
插床机构、牛头刨床机构
3.实现预定轨迹
曲柄摇杆机构(搅拌机)鹤式起重机
1.按连杆预定位置设计四杆机构
已知连杆长度、连杆二个或三个位置,求两连架杆长度和机架位置。
二个位置有无穷多组解,三个位置有唯一解
方法实质:
由圆点坐标定圆心点坐标(三点定圆心)
设计特征:
求对边构件(机架)上绞链中心位置。
2.按给定两连架杆预定位置设计四杆机构
已知两连架杆三组对应个位置和机架长度,求连杆和连架杆长度。
机构转化原理(转化为求对边构件(机架)上绞链中心位置)
3.按行程速比系数设计四杆机构
(1)曲柄摇杆机构
已知:
摇杆长度LCD、摆角Φ、行程速比系数K。
分析:
∠C1DC2=Φ,∠C1AC2=θ=
设曲柄长度为
,连杆长度为
,则:
AC1=
,AC2=
,AC1-AC2=
设计步骤:
①任选一点D,以D为顶点作等腰三角形,使两腰之长等于CD之长,∠C1DC2=Φ。
②计算θ=
③过C2作C1C2垂线C2M,过C1作与C1C2夹角为90°
-θ之射线C1N,得交点P,作△C1C2P之外接圆I。
④以A为圆心,AC2为半径作弧交AC1于E,则:
,四杆机构AB1C1D为所求。
注意:
理论上,A点可在弧C1G和C2PF上任选,故有无穷多组解,若有附加条件,则解唯一。
思考:
为何A不能在FG弧上任取。
附加条件:
a)给定机架长度AD=d
以D为圆心,d为半径作弧交圆I得A点。
b)给定[γ]
作∠AC1D>=[γ],得交点A,再校核。
C)给定曲柄长度AB=
①作C1C2中垂线与圆I相交得J点
②以J为圆心,JC1(或JC2)为半径作圆II。
③以C1为圆心,
为半径作弧交圆II,得E点。
④连接C1E并延长交圆I于A点。
⑤以A为圆心,
为半径作弧交AC1于B1点,四杆机构AB1C1D为所求。
d)给定连杆长度BC=
课后思考
(2)曲柄滑块机构
机构e≠0(若e=0,则θ=0)
偏距e,行程速比系数K,滑块行程H=C1C2
(3)摆动导杆机构
行程速比系数K,机架长度d(或曲柄长度AB=
)
例已知一曲柄摇杆机构,
摇杆与机架间的夹角分别为
ψ1=45°
,ψ2=90°
,机架长LAD=300mm,摇杆长LCD=200mm,确定曲柄和连杆长度LAB、LBC。
习题:
机构简图2-1
机构基本性质2-3,2-4
相对运动图解法2-14、2-15、2-16
机构设计2-18,2-21,2-22
 升级会员
升级会员 