第2章MEMS基础理论修改1Word文件下载.docx
《第2章MEMS基础理论修改1Word文件下载.docx》由会员分享,可在线阅读,更多相关《第2章MEMS基础理论修改1Word文件下载.docx(16页珍藏版)》请在冰豆网上搜索。
fe
Sp
mg
m(d2x/dt2)
uS/d(dx/dt)
eS(ΔL/L)
L4
p:
压力,S:
面积
g重力加速度
x:
位移量,t:
时间
u:
粘性系数,d:
间隔
e:
杨氏弹性模量
线性弹性系数
固有振动频率
转动惯量
重力产生的挠度
雷诺数
K
ω
I
D
Re
2UV/(ΔL)2
amr2
m/K
fi/ff
L-1
L5
U:
单位体积伸长所需能量
a:
常数,r:
旋转体的半径
热传导
热对流
热辐射
Qc
Qt
Qr
λΔTA/d
hΔTS
CT4S
ΔT:
温度差,λ:
热传导率
A:
断面积
h:
温度传导率
C:
常数
静电力
电磁力
热膨胀力
Fe
Fm
FT
εSE2/2
μSH2/2
eSΔL(T)/L
L0
ε:
介电常数,E:
电场
μ:
导磁率,H:
磁场强度
压电力也类似
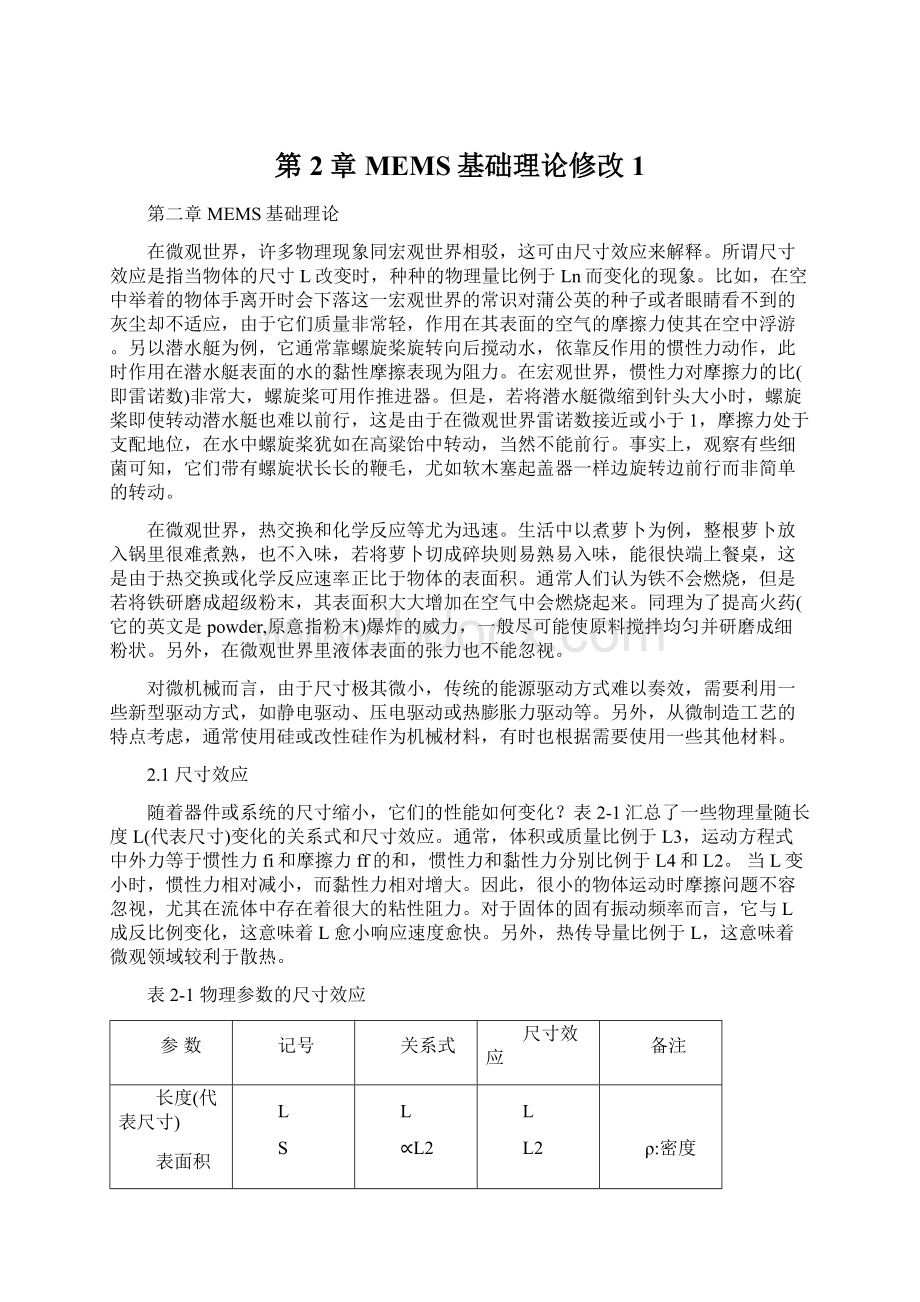
表2-2给出了运动参数受尺寸影响的估算值。
作为大小分别相差103倍的世界,分子的代表尺寸假定为1nm,细菌为1um,微机械为1mm。
人的代表尺寸若为1m,质量和表面积假定为50kg和1m2。
按照质量比例于L3,表面积比例于L2变化,可估算出各自的质量m和表面积S。
这里,各自的运动速度假定为每秒自身长(实际上,这种速度假设对人而言比较接近,对细菌来说约大十倍)。
表2-2与运动参数相关的尺寸效应
参数
单位
符号,
分子
细菌
微机械
人
代表尺寸
10-9(1nm)
10-6(1μm)
10-3(1mm)
1(1m)
质量
kg
m∝L3
5×
10-26
10-17
10-8
101
表面积
m2
S∝L2
10-18
10-12
10-6
1
速度
m/s
v(假定
∝L)
(水分子)
300m/s
(1μm/s)
10-3
(1mm/s)
(1m/s)
响应时间
(水中)
s
τ∝L2
10-7
10-1
105
密度,
μ:
摩擦系数
Re=
Lvρ/μ
水中
106
空气中
动量
kgm/s
mv∝L4
10-23
10-11
运动能量
J,kgm2/s2
mv2/2∝L5
(水分子的热运动能)
2.5×
10-29
10-14
设外力为F,黏性阻抗系数为f,速度为v,一般质量m的系统的运动方程如下
(2-1)
由该方程的解[v=F/f(1-e-t/τ)]可知,系统的响应时间常数τ为m/f。
对于半径L/2的球,黏性系数为u时,由斯托克斯定律知f等于3πuL,因此τ比例于L2。
考虑水中u约为10-3N·
s/m2,可计算得到表中的数值,这些数值说明物体尺寸愈小其响应时间愈快。
由表2-1还可知,对于微机械而言,在水中时其雷诺数约为1,而在空气中其雷诺数小于1,黏性力处于支配地位。
动量mv比例于L4,动能比例于L5,由计算结果可知微机械的动能比较小,这意味着对操作器而言耗能省;
对传感器而言,意味着高灵敏度。
下面以水分子为例考察热运动的影响。
热运动的能量等于玻尔兹曼常量k(1.38×
10-23J/K)和温度T的乘积,即kT,室温时(T=300K)水分子的能量约5×
10-21J,这个值比表2-2所计算的细菌的运动能量要大。
水分子的质量为3×
10-26kg,由下列两式可进一步求得它的动量和速度,通过计算其动量mv约为1×
10-23kg·
m/s,速度v约300m/s。
比较表2-2可知,水分子的动量与细菌(5×
m/s)的相近,细菌受到热运动的影响是很大的。
(2-2)
(2-3)
2.2微机械常用材料
在微机械中通常使用硅作功能材料,如用硅制做微型静电电机或微型齿轮等微机械,这是由于硅材料具有下列一些优点。
(1)它比铝轻,比不锈钢的拉伸强度高,硬度高,弹性好,抗疲劳。
(2)在许多环境下,不生锈,不溶解,耐高温。
(3)可援用现有的集成电路加工设备及工艺技术,很容易制做出微米程度的微构造,从而大大降低了MEMS的研制费。
(4)利用集成电路技术有可能把微机械同微处理器,传感器等电路巧妙地集成到一块硅片上。
(5)利用光刻技术和自动生产线可廉价大量生产。
(6)硅资源很丰富,市场上有大量的高纯度硅片出售。
通常人们认为硅片易碎裂,这是接触很薄且较大的硅片所得的体会。
但是对微构造而言,由硅制做的膜片,梁或弹簧呈现很好的弹性且无塑性变形,其机械强度和可靠性比同样形状和尺寸的金属微结构更为优异。
另外,与硅相关联的材料有二氧化硅,氮化硅(Si3N4)等也经常使用,它们与半导体工艺有很好的整合性。
硅的缺点是易于磨耗,不能做为磁性体使用等。
除硅材料外,根据用途不同也使用一些其他材料表2-3。
作为构造材料有聚酰亚胺(polyimide)等高分子材料及钽、钼、镍、铜、金等金属材料。
作为操作器的材料常使用石英,氧化锌(ZnO),PZT压低陶瓷等压电材料和钛镍(TiNi)等形状记忆合金。
另外,作为润滑材料还使用氮化硅,金刚石膜(DLC)等硬质素材。
这里,采用旋转涂层的办法很容易制做聚酰亚胺膜,多层重叠的话可获得数十微米厚的膜,这种膜与硅膜相比较柔软,能得到大的变形,并可用作绝缘层。
另外,将LIGA技术和电镀技术结合起来可得到厚达0.1mm以上的三维构造。
表2-3微机械使用的材料及其特性
名称
用途
制造工艺
特征
聚酰亚胺
钨
钼
镍,铜,金
GaAs
石英
ZnO
PZT
TiNi
Si3N4
DLC
构造材料
同上
光学器件
执行器
润滑膜
半导体工艺
电镀
异向异性腐蚀
厚膜工艺
成膜简单,有柔性,性能稳定
不溶于氢氟酸,有韧性
有韧性,用LIGA可制造0.1mm以上构造
发光,受光,可动构造可能
具有压电性,绝缘,透明
具有压电性
强压电性
形状记忆合金
稳定,绝缘,高强度
金刚石膜
2.3微构造的机械特性
微构造的特性很大程度上依存于材料的物理性能。
表2-4给出了材料的物理性能及它们对微小构造体的影响。
压力、加速度,及振动传感器的机械特性受材料内应力和弹性模量的影响很大。
这里以圆形薄膜微型压力传感器为例,当有内部应力存在时,压力p和中心变形w0的关系为(薄膜中心的变形量与膜厚相比较小时)
(2-4)
表2-4材料的物理性能及对微构造的影响
物理性能
影响
影响举例
①内应力(Pa)
②杨氏模量(Pa)
③拉伸强度(Pa)
④疲劳强度(Pa)
⑤热传导率[W/(m·
K)]
⑥热容量(J/K)
⑦摩擦
⑧磨耗
弹性变形,固有频率,弯曲变形
机械强度,
可靠性
热惯性常数,
热绝缘性
摩擦阻抗
持久性
压力传感器的灵敏度,
振动传感器的固有振动频率
微型水泵等的构造强度
流量传感器和热红外线传感器的响应速度及灵敏度
微型电机的转动速度
式中:
a和t为薄膜的半径和厚度;
E、ν和σ分别为薄膜的弹性模量、泊松比和内部应力。
对压力传感器而言,它的灵敏度正比例于应变。
图2-1给出了一组应变和内应力间的计算结果,由图可知,当内应力比较小(<
0.1GPa)时,传感器的灵敏度随弹性模量E的增大下降而与σ无关,当内应力很大时(>
100GPa),灵敏度严重下降至接近零。
图2-1圆形薄膜的内应力和变形特征
在振动传感器的场合,杨氏弹性模量和内部应力与振子的弹性系数有关,因此它们对固有振动频率有影响。
杨氏弹性模量和内部应力的值愈大,振动频率愈高。
从基板分离开的薄膜状悬臂梁的弯曲变形是许多微小构造体的共同问题,特别对利用静电力工作的微执行器其工作间隙通常很小,若悬臂梁产生变形,间隙大小难以达到要求,设计的特性就不能保证。
这种变形是薄膜厚度方向内部应力不均衡所致,对于多层膜或杂质掺入的场合,膜厚方向的内应力更加难以控制。
材料的拉伸强度和疲劳强度是微构造体设计上不可少的物性指标,特别对微型阀门、泵之类利用膜片的大变形工作的构造体更是如此。
热传导率、热容量等参数对要求热绝缘构造的流量传感器或热红外线传感器的设计很重要,为了获得良好的热绝缘性能和快速响应,希望热传导率和热容量都要小。
摩擦和磨耗对于旋转机构,连杆机构或利用滑动工作的微机械来说是不容忽视的问题,这在2.6节将进一步论述。
如上所述,材料的机械特性对微构造的设计至关重要。
单晶硅的物性人们已基本弄明白,表2-5列出了单晶硅和一些普通材料的机械物性。
由此表可知,单晶硅和不锈钢的杨氏模量基本相同,但它的屈服强度大约高3.5倍,是一种很优良的材料。
人们对薄膜材料物性的认识还很浅薄,事实上,在厚度几百微米的基板上形成的亚微米厚的薄膜的测定需要尖端技术,因此测定例很少。
近年来,人们试制了一些膜片,微型双支撑梁或悬臂梁这样的简单构造以测定薄膜的内部应力、杨氏弹性模量等参数。
另外,为了控制薄膜的内部应力或弹性模量,常采用向膜内注磷、硼或氢,并且注入杂质的量或者注入能量不同所得到的效果也不同,有关这方面的详细内容见参考文献。
表2-5各种材料的机械性能
材料
屈服
强度
/(1010dyn①/cm2)
努普硬度率
/(1010kg/cm2)
杨氏模量
/(1010dyn/cm2)
/(g/cm3)
热传导率/(W/cm·
℃)
热膨胀
/(10-6/℃)
金刚石1)
SiC1)
TiC1)
Al2O31)
Si3N41)
铁1)
SiO2(光纤)
硅1)
钢(最大强度)
不锈钢
锰
铝
50.0
21.0
20.0
15.4
14.0
12.6
8.4
7.0
4.2
4.0
2.1
0.17
7000
2480
2470
2100
3486
400
820
850
1500
485
660
275
130
10.35
7.00
4.97
5.30
3.85
1.96
0.73
1.90
2.10
4.10
2.00
3.430.70
3.5
3.2
4.9
3.1
7.8
2.5
2.3
7.9
19.3
10.3
2.7
20.000
3.500
3.300
0.500
0.190
0.803
0.014
1.570
0.970
1.780
0.329
1.380
2.360
1.00
3.30
6.40
5.40
0.80
12.00
0.55
2.33
4.50
17.30
5.00
25.00
1)单晶体。
①dyn为非法定单位,1dyn=10-5N。
2.4微构造的振动特性
为了考察微构造的振动特性,考虑如下1自由度的运动方程式,
(2-5)
m、λ、k分别为质量、阻尼常数、弹性系数。
通常λ较小时,共振频率f0、阻尼比ζ和品质因数Q由下列各式给出。
在式(2-8)中,f1和f2分别是振幅下降到峰值一半所对应的频率。
(2-6)
(2-7)
(2-8)
当式(2-5)的右端施加强制振动f0sinωt时,若阻尼比ζ很小,则系统处于共振状态,振幅非常大。
由于在式(2-6)中,k比例于L,m比例于L3,因此f0比例于L-1,这意味着L愈小共振频率愈高。
利用微制造工艺可制作出悬臂梁、双端支撑梁和膜片等振动子,振动模式有弯曲,扭曲和表面弹性波等。
激励方法分压电、静电或电磁、或利用热、光等周期性加热等方式。
与此相对应,检出方式也有利用压电方式、压阻响应、电容变化、光反射等各种各样。
振动子本身利用石英等压电晶体制作的比较多,手表用的石英振子即是很好的例子。
另外,也常采用压电薄膜或静电型执行器和电容型传感器相结合的构造,即激励用的执行器和检测用的传感器同构造的场合很多。
f0或Q都与许多量有关,因此可利于这些量的变化测量一些物理量参数。
由式(2-6)可知,f0是质量m和弹性系k的函数,而k又与材料的杨氏模量E成比例,因此可通过f0测量材料的E,同理也可以利用它的变化测量力、压力或温度等量,值得一提的是f0为脉冲信号,易于测量和传送,便于计算机处理。
振子周围的媒体不同时Q发生变化,利用这个特性可测量真空度,当真空度高或者说压力低时,振动的能量衰减很慢因而Q较大,反之低真空度时Q变的较低。
在设计、制作加速度传感器时为了防止共振,并要求频率响应宽,这就要正确设定阻尼系数,即要控制媒体的真空度。
2.5微构造的热特性
下面考察感热器件的温度特性。
设温度为T的器件发出功率W时其温度上升δT,此时热平衡方程式如下
(2-9)
C、G分别为热容量和等价导热系数。
器件所产生的热按W=W0ejwt变化时,上升温度由式(2-10)决定。
(2-10)
式中:
τ等于C/G,当ω远远小于1/τ时,温度变化能够跟随热的变化,此时灵敏度δT/W0等于1/G,这意味着热绝缘愈好(G愈小)器件的灵敏度愈高。
另外,由于响应时间τ等于C/G,这意味着热容量愈小器件的响应速度愈高。
理论上,热容量C由体积和密度的积表示,当尺寸减少时,它按尺寸的3次方减小。
热传播有热传导、热对流和热辐射三种形式,下面探讨等价热导G与尺寸的关系。
热传导是指热沿着一个物体内部的移动,若单位时间的传热量为Q,长度d断面积A的材料两端温度差为δT时,Q由式(2-11)来表示。
(2-11)
λ为热传导率。
当尺寸L缩小时,若A/d按比例变化,则Q比例于L减少。
热对流是指热从固体到气体或到液体的传播,它会影响热流量式传感器或热传导型真空度传感器的工作。
设热对流系数为h,表面积为S,传热量Q由式(2-12)给出。
(2-12)
这里,Q比例于S,即比例于L2。
热辐射是指热以电磁波(包括红外光和可见光)传播的形式,它会给高温加热器或红外线传感器带来一些问题。
根据玻尔兹曼定理,Q比例于T4,即
(2-13)
C为常数,显然Q比例于S,即比例于L2。
热传导、热对流的场合,Q正比例于
变化,它们间的比例系数称之为等价导热率G,分别比例于L、L2。
进一步参见式(2-10)可知,尺寸愈小,愈可能获得高灵敏度的感热传感器或低耗电加热器。
2.6摩擦磨耗的减少办法
对于具有微机构的微机电系统,减小摩擦和磨耗是必不可少的。
由式(2-5)的运动方程可预知,当物体的尺寸变小时其体积(按尺寸的3次方变化)比表面积(按尺寸的2次方变化)大幅度减小,这导致依存于体积的惯性项可忽略不计,而依存于表面积的摩擦的项处于支配地位。
在微机电系统中,由负荷所产生的接触压很小,但由摩擦、磨耗引起的表层原子间的相互作用却是个不容忽略的问题,例如,在磁盘、磁带这样的记忆媒体和磁头的接触面间会产生很大问题,此研究领域称为微摩擦学(microtribology)。
摩擦和磨耗对于旋转机构、连杆机构或利用滑动工作的微机械来说是不容忽视的问题。
摩擦是两界面间分子力相互作用的结果,只要使两界面分离就可减少它,具体可采用夹入第三种物质的办法,但是这种物质在支撑负荷的同时,要求它剪切方向的阻抗要小。
一般减小摩擦、磨耗的方法如图2-2所示。
图2-2减小摩擦磨耗的几种办法
图2-2(a)显示的是油之类吸附分子膜在两界面间存在时的情况,称为境界润滑。
在大气中固体表面通常被水分子吸附膜等所覆盖,因此它处于自然境界润滑状态。
与此相对应,在真空中由于无吸着层存在,摩擦大大增加,有时在分子间力的作用下,二者会粘贴起来,但利用这种特性我们可得到一种常温键合方法。
图2-2(b)和(c)称为流体润滑。
(b)显示有动压力作用时,相对运动使流体流入两界面间从而浮起移动体的情况,例如,用磁头读取磁盘信息时,通常利用空气将磁盘浮起约0.2um。
另外,一般机械使用油润滑也是此道理。
但是,这种润滑是利用黏性流体中运动产生的浮力,当无运动时就无润滑效果。
(c)是人工加压润滑的情况,它在静止时摩擦力也很小。
上述流体润滑的场合,黏性阻力可看作摩擦力。
图2-2(d)和(e)分别是固体粉末润滑和软质皮膜润滑。
由于粉末或皮膜的剪切强度较小从而能达到润滑的目的,它们在油性润滑剂不便使用时是行之有效的。
(f)是利用自润滑材料的情况,如黑铅、二硫化钼具有特殊构造,它们和聚四氟乙烯(teflon)间的分子结合力较弱,因而能够起到润滑作用。
(g)是利用滚动减小摩擦,而(h)是利用磁悬浮达到减小摩擦的目的。
另外,利用(i)的平行弹簧构造也可减少摩擦,它特别适应于微细构造的场合。
2.7微流路中液体的流动
狭窄流路中流体的流动涉及许多器件的动作,如气体与液相色谱仪、喷墨打印机的磁头的工作、磁盘与磁头间的流体润滑,还有分子筛分离膜细孔的动作解析。
通常,用微制造工艺制作的流体控制系统都设有微流路,正确把握流体在微流路中的流动是很有必要的。
在微制造工艺中,从很窄的缝隙处进行牺牲层腐蚀,还有深部洗净时液体的交换等都是很大的问题。
另外,对电容型加速度传感器而言,它的重块在窄缝动作时气体的阻尼不容忽视,阻尼的大小与间隙的3次方成反比例。
流路很窄时,与体积相比表面积相对增大,流路在管壁处会带来许多问题。
由于黏性,流体在管壁处速度为零,离开管壁愈远其流速愈大。
另外,在管壁附近呈现速度梯度的流层称为境界层,若流路很窄它会全部成为境界层。
除流体力学的问题外,还存在流体和管壁的相互作用,如色谱仪利用壁面的分子吸附特性进行成分分离。
此外,液体在有电场作用时会引起界面电泳现象。
气体的密度不超过液体的千分之一,它除压缩性外,分子间不易碰撞但易扩散。
压力较低时,即使很窄的流路中气体也可当作分子流处理。
对于不满足上述条件的气体或液体,因分子间存在碰撞,它们作为黏性流来处理。
黏性流的重要指标是雷诺数Re,它由式(2-14)定义
(2-14)
v是流体的速度;
d是流路的宽;
μ是动黏性摩擦系数(它定义为黏性常数u/密度ρ的值)。
当Re很小时称看作层流,但当它非常大时则作为湍流。
事实上,水中和空气中的雷诺数是完全不同的。
气体分子间不发生碰撞向前行进的平均距离称为平均自由行程λ,它与分子密度成反比例,在1atm①下,约为0.1um,随压力减小它也相应增大。
管路中气体流动的模式取决于d/λ比。
当二者比d/λ远大于1,即压力很大或管路很粗的场合,仅分子间碰撞为黏性流;
当d/λ远小于1时,气体分子与管壁发生碰撞称为分子流,即克努森流;
d/λ处于上述二者间时则称为中间流。
对于黏性流,流速v由式(2-15)决定
(2-15)
L为管长;
R、T分别是摩尔气体常量和热力学温度;
p1、p2分别是出、入口的压力。
对于分子流而言,流速v由式(2-16)决定,由于它与相对分子质量M的平方根成反比例,这意味着流速与分子的种类有关。
这里,考察磁盘与磁头间的气体润滑,大气中气体的速度每秒约数米至数十米,二者间的间隙约0.2um,由此计算得d/λ约0.3程度,即近似为分子流。
分子流不能作为连续体处理,必须进行量子解析。
①atm为非法定单位,1atm=1.01325
105pa,下同。
图2-3界面电泳现象
(2-16)
细管中液体流动时界面现象的影响是很大的。
如图2-3(a)所示,管壁和液体的界面处会产生电荷,这会引起以下现象。
液体流动时,如(b)所示它会带走管内侧的电荷从而产生电位差。
相反当在管两侧施加电压时,如(c)所示液体中的电荷离子在电场的作用下会产生电气泳动,或者管内侧的电荷移动如(d)所示会产生电气渗透。
值得一提的是电气渗透现象可用于微型泵的工作。
此外,液体界面处的表面张力或固体表面的潮湿都会引起毛细管现象,需要加以考虑。
2.8微机械的驱动原理
微机械通常尺寸很小,传统的电机不能用作驱动源使其工作。
因此,人们根据不同的用途尝试了各种驱动方式,大致可分为静电力、电磁力、压电效应、形状记忆合金、热膨胀等各种驱动方式。
表2-6汇总了各种驱动方式及其特点。
表2-6各种微操作器的驱动方式及其特点
操作器的种类
静电型
压电层叠型
双压电片
超声波电机
形状记忆合
 升级会员
升级会员 