一、二阶系统参数的测量与确定.doc
《一、二阶系统参数的测量与确定.doc》由会员分享,可在线阅读,更多相关《一、二阶系统参数的测量与确定.doc(7页珍藏版)》请在冰豆网上搜索。
广西大学实验报告纸
姓名:
刘志浩
指导老师:
林老师
成绩:
学院:
电气工程学院
专业:
自动化
班级:
132
实验内容:
一、二阶系统参数的测量与确定
2015年4月23日
其他组员:
鲁巍和刘志浩设计了MATLAB仿真并一起调试了动手实验
夏超设计了电路图并在multism中做了仿真
刘志浩通过和鲁巍,夏超讨论对实验结果进行了分析,撰写了实验报告。
【实验时间】2015年4月23日
【实验地点】广西大学综合楼808
【实验目的】学会一、二阶系统参数的测定方法。
【实验设备与软件】labACT实验平台与虚拟示波器
【实验原理】给定了模型或者系统,求其时域响应,一般称为一个正问题。
而有了系统的时域响应(有时候是一条连续的曲线,有时候则是一个信号序列)之后,反过来推算(估算)系统的模型,则是一个反问题。
在工程实践中,更多遇到的是反问题。
也就是说,对于待控制的对象的模型(也就是其特性)一般来说是不知道的。
即待控制的对象是一个灰箱甚至黑箱。
但我们可以通过实验(人为地加一些输入信号)或者根据系统实际运行记录,获取系统的时域响应,然后再来估算系统的模型。
系统模型的估算又分为两类。
一种情况是,已经知道了系统模型的结构,比如说,是一个一阶系统或者二阶系统,但对其内在的参数还不知道。
这种问题称为参数估算(或者估计)。
另外一种情况更为复杂,就连系统的结构都不知道,需要根据系统时域响应先去估算系统的结构,然后再去估算系统的参数。
这种问题称为系统辨识。
本次试验针对一阶和二阶线性系统依时域响应对参数进行估计。
1、对一阶系统采用小车运动系统(如图1)为对象
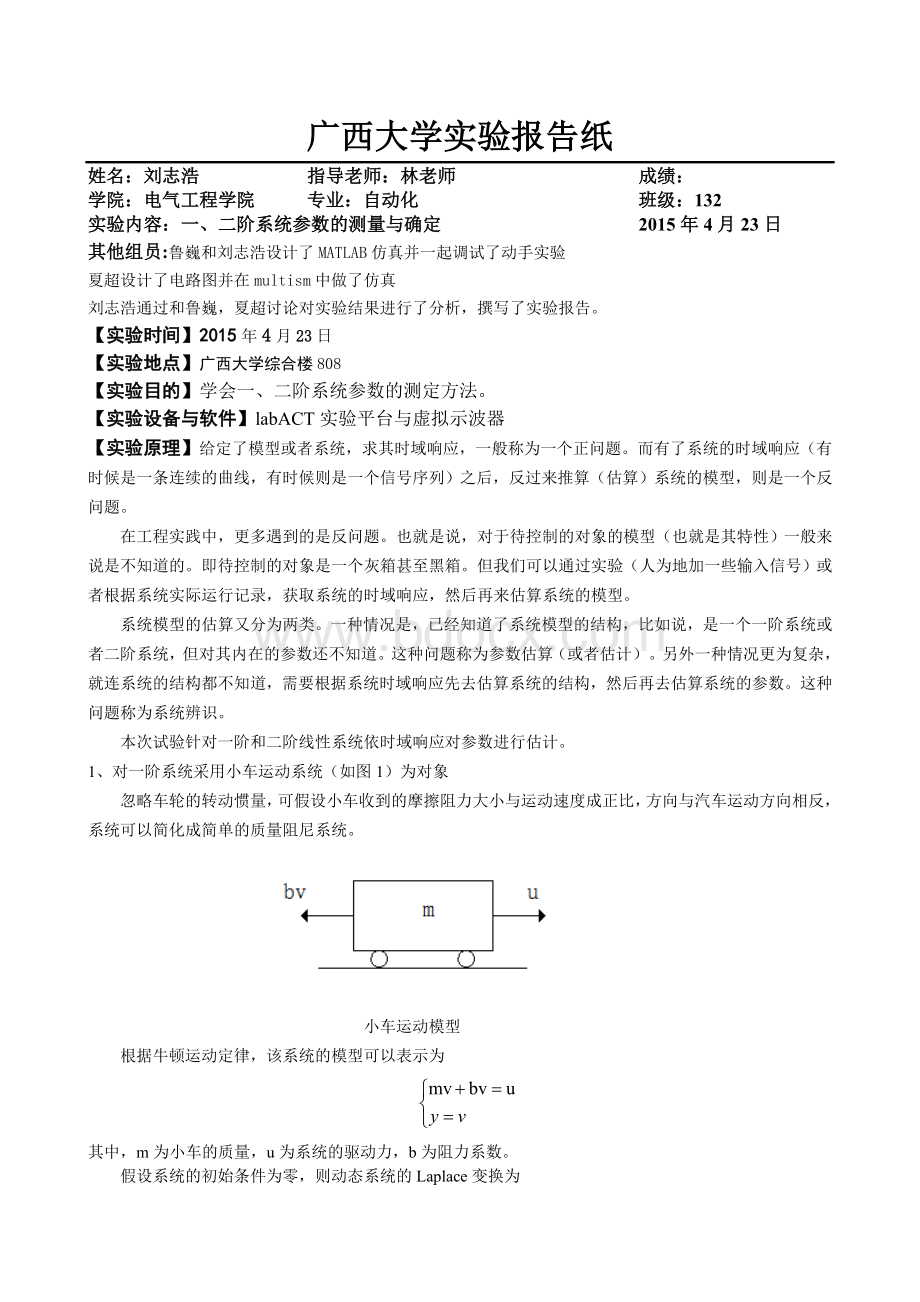
忽略车轮的转动惯量,可假设小车收到的摩擦阻力大小与运动速度成正比,方向与汽车运动方向相反,系统可以简化成简单的质量阻尼系统。
小车运动模型
根据牛顿运动定律,该系统的模型可以表示为
+
其中,m为小车的质量,u为系统的驱动力,b为阻力系数。
假设系统的初始条件为零,则动态系统的Laplace变换为
msV(s)+bV(s)=U(s)
Y(s)=V(s)
整理得小车运动系统的传递函数为
2、二阶系统以双容水箱系统(如图3)为对象
根据流体力学与管道基本结构,可以将双容水箱的模型简化为一个二阶系统
双容水箱系统
【实验内容、方法、过程与分析】
某小车运动系统模拟电路图如图
Multisim仿真实验结论如下
某双容水箱系统的模拟电路如图
Multisim仿真实验结论如下
labACT实验台仿真结论如下图
由图可得以下数据:
输入值Ui(v)
最终平稳值(v)
达到平稳时间(s)
4.30
4.26
1.460
由上表可得;。
对应系数相等得m=0.487/0.991=0.491;b=1/0.991=1.009,所以
最大超调量σ%
平稳值(v)
达到平稳时间(s)
0.39
1.88
0.49
增益D=(1.88-0)/2=0.94,
超调量σ%=39%,由ln(0.39)=-πξ/解得ξ=0.29。
由=ln(0.05)/ξ=0.49,解得=21.39.
所以
由/
/
/
解得
【实验结论与总结】
本次实验学会了一阶、二阶系统参数的测定方法,实验数据与仿真数据在误差允许的范围内。
在进行labACT实验台实验前,先在Multisim进行仿真实验,在计算的过程中,必须将传递函数表达式转化为标准的表达式,才能用学过的公式去求解。
 升级会员
升级会员 