智能车高速稳定行驶局部路径规划算法精品文档完整版Word文件下载.docx
《智能车高速稳定行驶局部路径规划算法精品文档完整版Word文件下载.docx》由会员分享,可在线阅读,更多相关《智能车高速稳定行驶局部路径规划算法精品文档完整版Word文件下载.docx(9页珍藏版)》请在冰豆网上搜索。
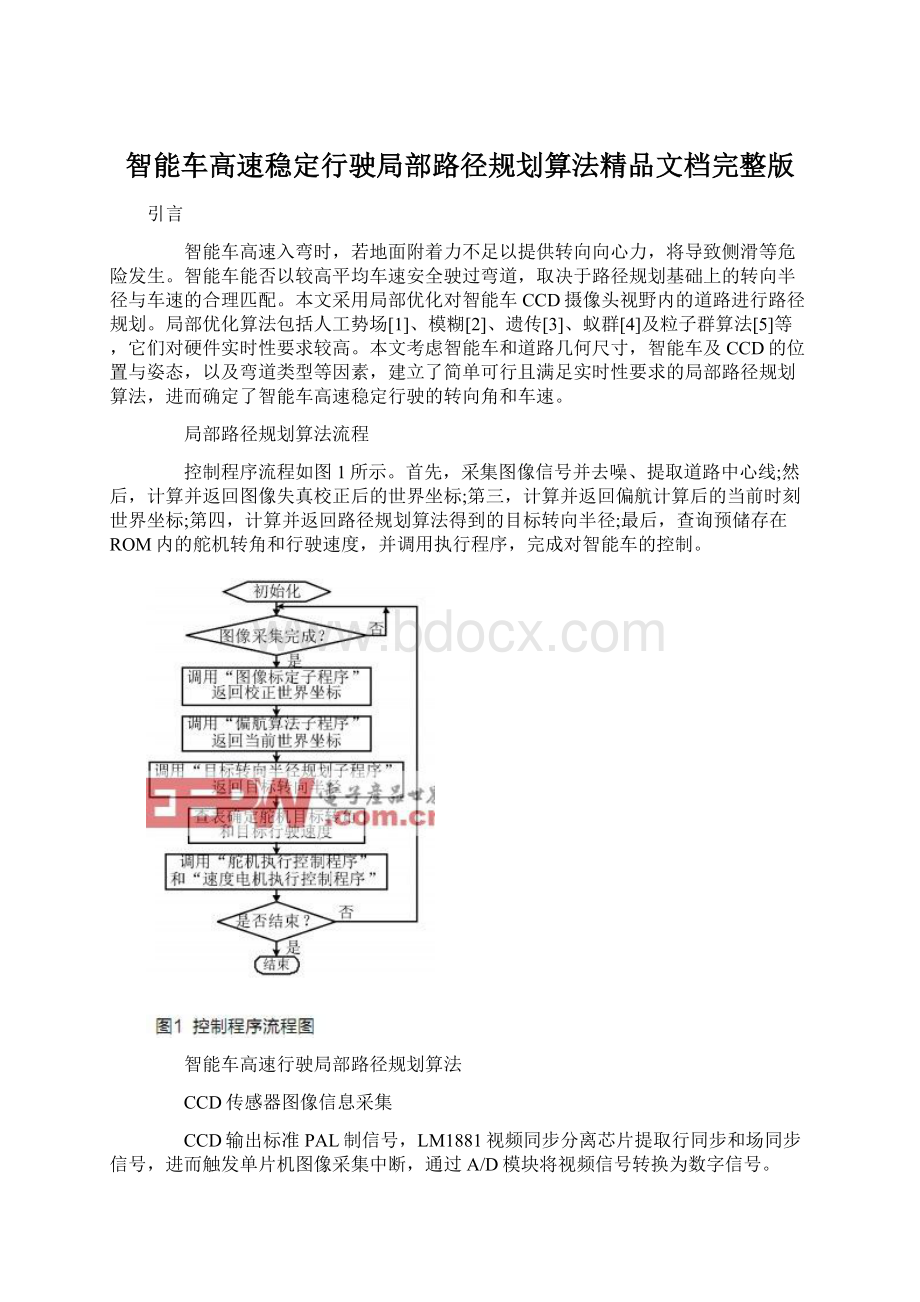
第三,计算并返回偏航计算后的当前时刻世界坐标;
第四,计算并返回路径规划算法得到的目标转向半径;
最后,查询预储存在ROM内的舵机转角和行驶速度,并调用执行程序,完成对智能车的控制。
智能车高速行驶局部路径规划算法
CCD传感器图像信息采集
CCD输出标准PAL制信号,LM1881视频同步分离芯片提取行同步和场同步信号,进而触发单片机图像采集中断,通过A/D模块将视频信号转换为数字信号。
CCD输出图像分辨率为320×
600,考虑单片机内存和运算速度限制,取分辨率为37×
150。
CCD传感器标定
假设道路为水平面,故在二维平面内标定CCD传感器,从而建立CCD图像坐标系与世界坐标系的对应关系。
如图2所示,图像坐标系原点位于图像左下角,坐标轴u、v分别为CCD图像平面的横向和纵向;
世界坐标系原点O'
位于智能车几何中心,x'
和y'
轴分别为智能车横向与纵向对称面在水平面的投影线;
中间坐标系原点O1'
位于视场最近端中点,x1和y1轴分别为中间坐标系所在平面的横向和纵向。
图2中各参数的物理意义与几何尺寸数值见表1。
由于CCD摄像头存在俯仰角以及镜头加工工艺和装配精度等因素的影响,采集的图像存在梯形和桶形失真,故基于小孔成像原理校正失真[6]:
视野同一点在图像坐标系与中间坐标系的坐标分别为(u,v)和(x1,y1),通过实验标定二者关系如下:
式中a1,b1为实验标定的拟合系数;
a[v-1],b[v-1],c[v-1]为实验标定的拟合向量的第v个元素(即拟合系数)。
依据图3所示的几何关系,可得到坐标(x1,y1)与(x'
y'
)的相应关系。
基于坐标变换的偏航算法
由于从CCD传感器采集图像开始到单片机输出控制量结束经历一定程序执行时间,在这段时间内,智能车行驶一定距离并转过一定角度,故为了针对当前时刻智能车相对道路的位置及姿态输出控制量,需将道路中心线各点坐标进行坐标转换,如图4。
由车速,转向半径及程序执行时间可求出智能车世界坐标系在程序执行时间内所转过的角度为:
式中ω为智能车瞬时角速度,t为程序执行时间,V为智能车行驶速度,R为转向半径。
故新坐标系的两坐标轴在原坐标系内方程分别为:
利用点到直线距离公式,可求出任意一点P'
(x'
y'
)坐标转换后的新坐标P(x,y)。
目标转向半径确定
智能车行驶道路为中心引导线两侧等宽且总宽为Wr的带状区域,如图5。
道路中心线是由直线和曲率不等的圆弧组成的。
直道行驶时,智能车转向轮转角为零,完全巡线即可。
在弯道行驶时,对智能车给定一个转向轮转角,其行驶轨迹是一段圆弧,故确定智能车目标路径即确定一个目标转向半径,以确保智能车在不触及道路边界的条件下以更短的时间通过弯道。
弯道形式大体上可以分为单个弯道和连续弯道两类。
对于单个弯道,当智能车以一定转向半径过弯时,向心力方程为:
式中:
F为地面对智能车提供的向心力,M为智能车质量,V为智能车行驶速度,R为转向半径。
从(5)式中可知,当向心力一定时,最高稳定车速与转向半径成开平方关系:
k1为比例系数。
转向半径与路程成比例关系:
S为行驶路程,k2为比例系数。
则行驶时间:
因此,在单个弯道上,选择较小的转向半径可以减少行驶时间。
连续弯道由几段半径相同或不同的圆弧组成,当两段圆弧内切时,可近似看成曲率渐变的一段圆弧,当两段圆弧外切时,应充分利用道路宽度,切内线行驶以增大转向半径,减少行驶路程,进而减少行驶时间。
一段圆弧目标转向半径的确定
由一段圆弧上三点坐标,通过求两条弦线中垂线交点的方法可求出圆心坐标,如图6所示,其中P1(x1,y1),P2(x2,y2),P3(x3,y3)为经过偏航算法坐标转换后一段圆弧上的三点,O1(x0,y0)为圆弧圆心。
计算可得:
得到圆心坐标后,计算三点中任意一点与圆心的距离即为道路中心线圆弧半径R1。
同时可求出相应的与其同心且半径为R2的一段内圆弧,保证智能车沿该段内圆弧行驶时内侧车轮刚好处于不触及道路边界的临界状态,即
式中Wr为道路宽度,Wc为智能车几何宽度。
目标圆弧即为通过世界坐标系原点O且与内圆弧相内切的一段圆弧,如图7。
计算可得,目标转向半径R0为:
式中x0,y0为道路中心线圆弧圆心的横坐标和纵坐标,R2为内圆弧半径。
两段外切圆弧目标转向半径的确定
当两段圆弧外切连接,可采用“弦线法”确定两段圆弧的切点,如图8,将圆弧平分为7段,分别连线13,24,35,46,57,68,则有一条弦线与圆弧相交,若没有找到交点或找到多个交点,可将圆弧平分为更多段数进行连线,直到仅找到一个交点为止,近似认为该交点即为切点。
将切点作为两段圆弧的公用特征点,再分别从两段圆弧上各提取两点作为特征点,按照一段圆弧圆心位置的计算方法,可分别求出两段圆弧的圆心位置和半径,进而可分别计算出响应远端圆弧的目标转向半径Rf和响应近端圆弧的目标转向半径Rn,如图9。
若响应远端圆弧的目标圆弧与响应近端圆弧的目标圆弧弯曲方向相反,则选取Rf为目标半径;
否则,即两者弯曲方向相同时,当Rf≤Rn时,为保证响应近端弯道时不触及道路边界,选取Rn为目标半径,当Rf>
Rn时,选取Rf为目标半径。
由此可在连续弯道中规划出一条近似最优的通过路径。
舵机转角和行驶速度的确定
当智能车行驶速度较高且侧向加速度剧烈变化时,容易出现侧向附着力不足以提供车辆所需的侧向力的情况。
这种情况发生在前轮,会造成前轮失去转向能力;
发生在后轮,则会造成后轮侧滑甚至激转。
由于在智能车实际行驶过程中发生侧滑现象较多,故通过定圆周实验可确定智能车在一系列不同转向半径下确保智能车不发生侧滑的转向轮转角及最高稳定速度,并拟合出转向轮转角与转向半径及最高稳定速度与转向半径之间的关系曲线,如图10、11。
因此,在智能车行驶过程中通过路径规划计算出目标转向半径后,可通过查表确定期望的转向轮转角及最高稳定速度,并通过PID控制器对舵机和电机进行控制。
智能车及无线传输模块试验平台
为实时监视智能车运行参数,搭建智能车及无线传输模块硬件试验平台如图12。
试验平台由智能车和计算机两部分组成,智能车是试验平台的主体,计算机通过虚拟仪器语言Labwindows开发的监控程序实现试验数据的监控及显示,两者之间通过无线通信模块进行数据实时传输。
其中,智能车部分包括:
①传感器单元,由CCD传感器,测速编码器组成;
②MC9S12DP512单片机,为智能车的控制器;
③电源管理单元,为智能车各工作单元提供能源;
④动作执行单元,由电机驱动模块、电机及舵机组成⑤无线通信模块发射端。
计算机部分主要由Labwindows监控程序及无线模块接收端组成。
实验结果与比较
为验证算法有效性,搭建实验道路如图13,分别使智能车采用传统的跟踪道路中心线循迹控制算法和采用路径规划算法由起点开始各逆时针方向行驶一周,两者皆根据上文中标定实验分配转向轮转向角和车速,并在行驶过程中通过无线传输模块发送其转向轮转角及实时车速,并通过计算机拟合出转向轮转角对比曲线如图14,车速对比曲线如图15。
实验结果表明,在不触及道路边界的前提下,相比传统的跟踪道路中心线循迹控制算法,通过局部路径规划算法可以使智能车在复杂的行驶道路中平均车速提高大约40%,缩短了智能车的行驶时间;
转向轮转角的绝对值总体上减小大约50%,降低了侧向加速度剧烈变化危险工况发生的几率,提高了智能车的高速行驶稳定性。
参考文献:
[1]Khatib.Real-timeobstacleavoidanceformanipulatorsandmobilerobots[J].TheInternationalJournalofRoboticResearch.1986,5
(1):
90-98
[2]付宜利,顾晓宇,王树国.基于模糊控制的自主智能车路径规划策略研究[J].智能车,2004,26(6):
548-552.
[3]HuY,YangSX.Knowledgebasedgeneticalgorithmforpathplanningofamobilerobot[C].Proceedingsofthe2004IEEEInternationalConferenceonRobotics&
Automation.NewOrleans:
[s.n.],2004:
4350-4355
[4]朱庆保.复杂环境下的智能车路径规划蚂蚁算法[J].自动化学报.2006,32(4):
586-593
[5]杨维,李歧强.粒子群算法综述[J].中国工程科学,2004,6(5):
87-94.
[6]赵祥磊,吴颖熹,雷典.第四届“飞思卡尔”杯智能汽车竞赛吉林大学爱德队技术报告[R].2009
 升级会员
升级会员 