35KV微机线路保护原理说明书文档格式.docx
《35KV微机线路保护原理说明书文档格式.docx》由会员分享,可在线阅读,更多相关《35KV微机线路保护原理说明书文档格式.docx(12页珍藏版)》请在冰豆网上搜索。
三段式过电流保护原理
输电线路发生短路时,相电流突然增大,线电压降低,当故障线路上的相电流大于某一个规定值,同时保护安装处母线电压小于某一个规定值时,保护将跳开故障线路上的断路器而将故障线路断电,这就是过电流保护的工作原理。
其中,规定值就是过电流保护的动作电流,它是能使电流保护动作的最小电流,通常用Idz表示。
过电流保护在
35KV及以下的输电线路中被广泛应用。
下面对三段式过电流保护分别予以介绍:
(1)
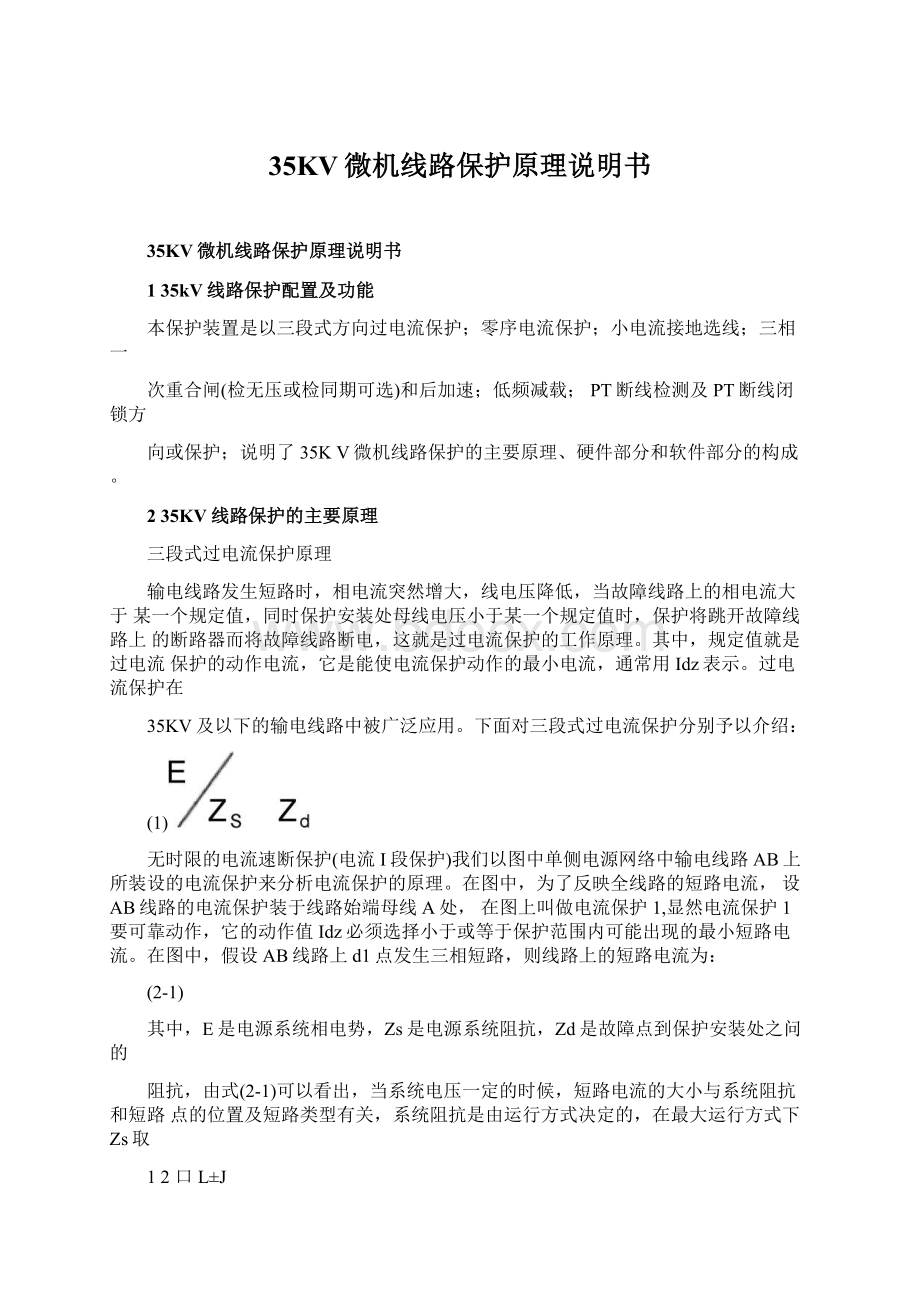
无时限的电流速断保护(电流I段保护)我们以图中单侧电源网络中输电线路AB上所装设的电流保护来分析电流保护的原理。
在图中,为了反映全线路的短路电流,设AB线路的电流保护装于线路始端母线A处,在图上叫做电流保护1,显然电流保护1要可靠动作,它的动作值Idz必须选择小于或等于保护范围内可能出现的最小短路电流。
在图中,假设AB线路上d1点发生三相短路,则线路上的短路电流为:
(2-1)
其中,E是电源系统相电势,Zs是电源系统阻抗,Zd是故障点到保护安装处之问的
阻抗,由式(2-1)可以看出,当系统电压一定的时候,短路电流的大小与系统阻抗和短路点的位置及短路类型有关,系统阻抗是由运行方式决定的,在最大运行方式下Zs取
12口L±
J
LainLaoxLd
图单侧电源网络中电流保护原理图
最小值,在最小运行方式下Zs取最大值,在实际中,一般来说系统在最大运行方式下三相短路电流最大,称此为保护的最大运行方式,系统在最小运行方式下两相短路电流最小,称此为保护的最小运行方式。
这两种情况下的短路电流随故障点位置变化的曲线如图中的曲线I和曲线2,曲线1为最大运行方式下的曲线,曲线2为最小运行方式下的曲线,当系统运行在其它任何方式下发生任何类型的短路时,Idf(Ld)曲线位于曲线I
和曲线2之间。
对安装在AB线路的保护1来说,快速切除AB线路的故障是它的首要任务,因此其动作值IDZ应该小于等于AB线路上可能出现的最小短路电流,最小短路电流为线路末端发生两相短路时的短路电流lB)min,iBLIdZ。
同时,当BC线路靠近B端发生短路时,由于短路电流大于lB)min,这时有可能使在AB
线路的保护1误动作,因此,为了不使保护1误动作同时可以区分所保护线路的末端故障和下一条线路的始端故障并且考虑到信号处理系统所产生的误差,保护1的动作电流应
满足:
其中,Kk是可靠系数,通常KkA,lB3L是B母线处在最大运行方式下发生三相短路的电流。
根据式(2-2)整定的电流可以保证保护的选择性,如果省略装置和断路器的动作时
间,保护可以无延时动作,因此将此电流保护叫做无时限电流速断保护,也叫电流I段保护,它的动作值选择原则为:
按躲开本线路末端发生短路时的最大短路电流整定。
但是,从图中可以看出,系统在最小运行方式下保护的范围Lmin最小,而在最大运行方式下保护的范围Lmax最大,无时限电流速断保护的范围随着运行方式的变化而变化,在最小方式下保护范围可能为0,这是无时限电流速断保护的缺点。
(2)限时电流速断保护(电流U段保护)”
电流I段保护并不能保护线路的全长,应该在A母线处再装设一套电流保护,这套电流保护用来保护AB线路的全长,这样,如果在下一段相邻线路BC靠近B端发生短路时,这套保护将会跳开1DL而失去选择性,因此,将这套保护启动以后经过一个延时再作用于出口跳闸,当BC始端发生短路时,装在B母线的电流速断保护2首先动作,而装在保护1处的带延时的电流保护不会误动,从而保证了选择性。
这套电流保护被称为限时电流速断保护,也叫电流U段保护,电流U段保护的延时时间一般为左右。
在图中看出,只要AB闻的U段电流保护范围不超过BC间的I段电流保护范围,就可以保证选择性,即:
其中iDz.i是AB间U段电流保护的整定值,lDz.2是BC间I段电流保护的整定值,KK可靠系数,KKll一般大于。
在线路上安装了电流I段和电流U段保护以后,整段线路的故障可在~之内得到解
决,我们称电流I段和U段保护为线路的主保护
图三段式电流保护原理图
(3)定时限过电流保护(电流川段保护)
一条线路保护中只安装了主保护,理论上来说可以解决线路的所有故障,但是当主保护由于各种原因而拒动时,就需要一个后备保护,用来解决当主保护拒动时切除线路故障,后备保护可以保护本线路全长,也可以保护相邻线路全长。
后各保护也叫电流川段保护,一般是定时限过电流保护,在图中可以看出川段电流的保护范围,它的动作值整定原则为:
躲过正常运行时的最大负荷电流来整定,即:
(2-4)
其中,KK是电流川段可靠系数,KKK大于,Kst是自启动系数,Kst大于等于1,Kre为返回系数,Kre小于1,IL.AB.max为线路AB上可能流过的最大电流,IDZ.1是装在保护1处的电流川段整定值。
电流川段保护的延时时间比电流U段保护的延时时间要长,而且,越靠近电网末端的川段电流保护动作时间越短,在越靠近电源附近的川段电流保护动作时间越长,所以电流川段保护只能用做后备保护。
输电线路方向性电流保护的工作原理
前面分析的是单侧电网过电流保护,而在实际中,一般都是双侧电源或者环网,以
双侧电源网络为例说明,为了切除线路上的故障,线路的两侧都应该装设保护装置和断
路器
E1
图方向型电流保护工作原理图
从图可以看出,当两端都有电源时,如果di点发生短路故障,按选择性要求应该是离故障点最近的保护1和保护2动作,使1DL和2DL跳闸切除故障,但是由于保护2和保护3流过同一电流I有可能使保护3误动作,而这个误动作的保护是由于保护安装处反方向发生故障时,由对侧电源提供的短路电流而引起的,而且误动作的保护上流过的电流方向都是由被保护的线路流向保护安装处母线,正确动作的保护上电流方向是由保护
安装处母线流向被保护的线路,两者电流方向正好相反,所以,应该在原来三段式电流保护的基础上加上一个判断电流方向的元件,当正方向电流时保护动作,而负方向电流时保护不动作,这就是方向电流保护的工作原理。
在实际中,由于电流是交流量,不用直接来判断它的方向,但是当故障点一定的时候,短路电流和保护安装处的母线电压之间的夹角是不变的,所以应该利用功率方向元件来判断,如果设保护2的短路电流和母线电压之间的夹角为di,那么保护3的短路
电流和母线电压之间的夹角是180°
di,则保护2和保护3处的短路功率为
P2>
0,P3<
O根据功率方向元件可以判断哪个保护应该动作,哪个保护不应该动作,从而有效的解决了保护的误动作。
采用90°
接线方式后,当保护安装处附近发生两相相间短路时,有两相输入保护的电压中含有非故障相电压,而非故障相电压不变,故障相电压降低,所以输入保护装置的电压仍然很高,这样就消除了保护的死区,当保护安装处附近发生三相短路时,因为输入保护的电压都很低,但是在故障前瞬间这些值都很大,所以可以利用微机保护的记忆功能来使输入电压的幅值增大而保持故障电压的相位特征,从而可以消除死区。
单相接地报警原理
35KV电网是中性点不接地系统,当发生单相接地故障时,故障点的电流很小,而且三相线电压仍然保持对称,对负荷的供电基本没有影响,在一般情况下,允许再运行1-2小时,不必立即跳闸,但是这时其它两相的对地电压要升高倍,为防止故障进一
步扩大成两点或多点接地短路而对负荷供电造成影响,应该及时的发出报警信号,以便运行人员采取措施给予清除。
小电流系统的单相接地原理图如图所示。
在图中可以看出,系统在正常运行情况下,三相对地有相同的电容C。
,每一相都
有一个对地电容电流,这三个电流之和为0,假设A相发生单相接地短路,A相对地电压为0,其它两相对地电压变为原来的.3倍,对地电容电流也变为原来的.3倍,我们用lb和Ic来表示非故障相的对地电流,则可以得出:
lbUBDjC01cUCDjC0(2-5)
此时,从接地点流回的电流IdlbIc3UC0,为正常运行时三相对地电容电流的算术和。
当系统中有多条线路存在时,每条线路上都有对地电容存在,当其中一条线路A相发生单相接地故障时,整
个系统的A相对地电压都为0,所以A相的对地电容电流为0,在非故障线路上,B相和C相流有本身的电容电流,因此,在线路的始端反应的零序电流为
10x1bx1cx(2-6)
其有效值是3l°
x3UC0,就是该线路本身的电容电流,该电容电流的方向为母线
流向线路。
总结以上分析的结果,我们可以得出以下结论:
(1)发生单相接地故障时,整个系统都出现零序电压。
(2)非故障线路上的零序电流数值上等于本身的对地电容电流,电容性无功功率实际方向是从母线流向线路。
IC
IB
^ITf
图小电流系统单相接地原理图
(3)故障线路上,零序电流为整个系统非故障线路对地电容电流之和,数值比较大,电容性无功功率方向是从线路流向母线。
3保护装置的硬件构成及特点
微机保护的硬件系统
一套微机保护由硬件系统和软件系统两大部分组成。
硬件系统是构成微机保护的基础,软件系统是微机保护的核心。
微机保护的硬件系统构成,它由下述几部分构成:
⑴微机主系统:
它是以中央处理器(CPU为核心,专门设计的一套微型计算机,完成数字信号的处理工作。
⑵模拟量数据采集系统:
对模拟量信号进行测量和数字量转换。
⑶开关量的输入输出系统:
对输入开关量进行采样、通过驱动小型继电器输出跳闸命令和开出信号。
⑷外部通信接口:
与外部设备通讯。
⑸人机对话接口:
完成人机对话。
⑹电源:
把变电站的直流电压转换成微机保护装置需要的稳定的直流电压。
保护装置的硬件工作原理图如图3-1所示,它采用双CPU系统,下面的CPU称为起动CPU,运行起动元件,当起动元件动作时,给出口继电器送正电源。
上面的CPU(采用DSP数字信号处理器)称为故障判断CPU,运行各种动作继电器算法和逻辑判断程序,动作后给出口继电器发跳闸脉冲。
只有出口继电器同时得到正电源和跳闸脉冲,才能完成保护跳闸。
从逻辑上来说,双CPU组成了逻辑’与’的关系,起动元件和故障判断元件同时动
作,保护才能出口跳闸,这样提高了装置的可靠性。
图3-1保护装置硬件工作原理图
模拟量数据采集系统
模拟量数据采集系统的功能是将来自电压、电流互感器的连续的电压、电流信号转换成离散的数字量信号供微机主系统进行保护运算。
在介绍模拟量数据采集系统前,先对若干名词作一些解释。
(1)采样:
在给定的时刻对连续的模拟量信号进行测量称做采样。
每隔相同的时间对模拟量信号测量一次称做理想采样。
微机保护采用的都是理想采样。
(2)采样频率fs:
每秒采样的次数称做采样频率。
采样频率越高对模拟信号的测量越正确。
但采样频率越高对计算机的运算速度的要求也越高。
计算机必须在相邻两个采样时刻之间完成它的运算工作,否则将造成数据的堆积而导致运算的紊乱。
在目前的技术条件下,微机保护中使用的采样频率有600Hz1000Hz、1200Hz三种。
(3)采样周期T
\:
相邻的两个米样点之间的时间间隔称做米样同期。
米样同期与米
样频率互为倒数Ts
1f。
当米样频率为600Hz、1000Hz、1200Hz
 升级会员
升级会员 