电磁感应与动量结合2017新考纲Word格式.doc
《电磁感应与动量结合2017新考纲Word格式.doc》由会员分享,可在线阅读,更多相关《电磁感应与动量结合2017新考纲Word格式.doc(3页珍藏版)》请在冰豆网上搜索。
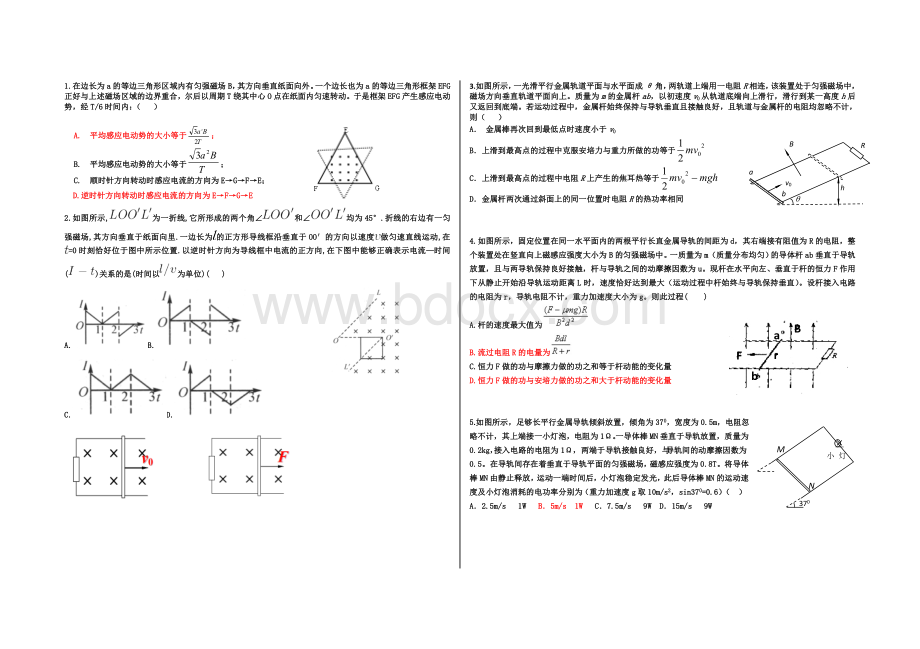
2.如图所示,为一折线,它所形成的两个角∠和∠均为45°
.折线的右边有一匀强磁场,其方向垂直于纸面向里.一边长为的正方形导线框沿垂直于OO′的方向以速度做匀速直线运动,在=0时刻恰好位于图中所示位置.以逆时针方向为导线框中电流的正方向,在下图中能够正确表示电流—时间()关系的是(时间以为单位)(
)
A.B.
C.D.
3.如图所示,一光滑平行金属轨道平面与水平面成θ角,两轨道上端用一电阻R相连,该装置处于匀强磁场中,磁场方向垂直轨道平面向上。
质量为m的金属杆ab,以初速度v0从轨道底端向上滑行,滑行到某一高度h后又返回到底端。
若运动过程中,金属杆始终保持与导轨垂直且接触良好,且轨道与金属杆的电阻均忽略不计,则()
q
h
a
b
R
B
v0
A.金属棒再次回到最低点时速度小于v0
B.上滑到最高点的过程中克服安培力与重力所做的功等于
C.上滑到最高点的过程中电阻R上产生的焦耳热等于
D.金属杆两次通过斜面上的同一位置时电阻R的热功率相同
r
F
4.如图所示,固定位置在同一水平面内的两根平行长直金属导轨的间距为d,其右端接有阻值为R的电阻,整个装置处在竖直向上磁感应强度大小为B的匀强磁场中。
一质量为m(质量分布均匀)的导体杆ab垂直于导轨放置,且与两导轨保持良好接触,杆与导轨之间的动摩擦因数为u。
现杆在水平向左、垂直于杆的恒力F作用下从静止开始沿导轨运动距离L时,速度恰好达到最大(运动过程中杆始终与导轨保持垂直)。
设杆接入电路的电阻为r,导轨电阻不计,重力加速度大小为g。
则此过程()
A.杆的速度最大值为
B.流过电阻R的电量为
C.恒力F做的功与摩擦力做的功之和等于杆动能的变化量
D.恒力F做的功与安培力做的功之和大于杆动能的变化量
370
N
×
M
小灯泡
5.如图所示,足够长平行金属导轨倾斜放置,倾角为370,宽度为0.5m,电阻忽略不计,其上端接一小灯泡,电阻为1Ω。
一导体棒MN垂直于导轨放置,质量为0.2kg,接入电路的电阻为1Ω,两端于导轨接触良好,与导轨间的动摩擦因数为0.5。
在导轨间存在着垂直于导轨平面的匀强磁场,磁感应强度为0.8T。
将导体棒MN由静止释放,运动一端时间后,小灯泡稳定发光,此后导体棒MN的运动速度及小灯泡消耗的电功率分别为(重力加速度g取10m/s2,sin370=0.6)()
A.2.5m/s1WB.5m/s1WC.7.5m/s9WD.15m/s9W
6.如图甲所示,MN、PQ为间距L=0.5m足够长的平行导轨,NQ⊥MN,导轨的电阻均不计。
导轨平面与水平面间的夹角,NQ间连接有一个R=4Ω的电阻。
有一匀强磁场垂直于导轨平面且方向向上,磁感应强度为B0=1T。
将一根质量为m=0.05kg的金属棒ab紧靠NQ放置在导轨上,且与导轨接触良好。
现由静止释放金属棒,当金属棒滑行至cd处时达到稳定速度,已知在此过程中通过金属棒截面的电量q=0.2C,且金属棒的加速度a与速度v的关系如图乙所示,设金属棒沿导轨向下运动过程中始终与NQ平行。
取g=10m/s2。
求:
(1)金属棒与导轨间的动摩擦因数μ;
(2)cd离NQ的距离s;
(3)若将金属棒滑行至cd处的时刻记作t=0,从此时刻起,让磁感应强度逐渐减小,为使金属棒中不产生感应电流,则磁感应强度B应怎样随时间t变化(写出B与t的关系式)。
7.某课外兴趣小组为研究感应器设计了如图所示的装置,光滑导轨MN、PQ倾斜固定,与足够长水平固定的光滑导轨MR、PS在M、P两点光滑连接,水平导轨处在竖直方向的匀强磁场中,在水平导轨两侧安装有“感应控制器”,其结构中包括感应器1、感应器2和锁定控制器,现将导体棒a垂直导轨放置在水平导轨上,并置于锁定控制器处,导体棒b垂直放置在倾斜导轨某处,由静止释放,当导体棒b到达MP处时,被感应器1感应,并发送锁定信号到锁定控制器,瞬间锁定导体棒a,使其不得水平移动,当导体棒b运动到CD处时,被感应器2感应,并发送解锁信号到锁定控制器,瞬间解锁导体棒a,之后两导体棒在磁场中运动。
如图所示,两导体棒的质量为ma=mb=1kg,磁场的感应强度为B=1T,MPCD间的距离为L0=1m,导轨宽L=1m,两导体棒的电阻为,导轨电阻不计,CD与AB间距离足够大,导体棒b释放的位置到水平导轨的高度h=0.8m,(g=10m/s2)求(计算结果保留两位有效数字)
(1)导体棒b到达感应器2处时的速度大小。
(2)由于感应控制器的安装使系统多损失的机械能。
感应器1感应器2锁定控制器
N
Qb
MCR
PDAa
B
8.在工业中有一种感应控制装置,利用它进行如图情景演示。
两根间距为L=5m的光滑平行金属导轨,电阻不计,左端向上弯曲,其余水平,水平导轨处在磁感应强度为B=0.4T的竖直向上的匀强磁场中,弯曲部分都不在磁场中。
有两根金属棒垂直导轨放置,其中a棒质量为M=2kg,电阻为R=2Ω;
b棒被感应控制装置固定在水平导轨上,距离水平导轨左端s=2m,b棒质量为m=1kg,电阻也为R=2Ω。
现在a棒从左端弯曲导轨高H处静止释放,当a棒即将与b棒相碰时(已知此时a棒的速度v=2m/s),感应控制装置立即放开b棒,让它可以在导轨上自由运动,,然后a与b发生弹性正碰。
感应控制装置始终对a棒的运动没有任何影响,导轨足够长。
则求
(1)最终稳定后a棒的速度大小;
(2)a与b碰撞后的瞬间,b棒的速度大小;
(3)a棒的释放高度H。
9.在如图所示的水平导轨上(摩擦、电阻忽略不计),有竖直向下的匀强磁场,磁感强度B,导轨左端的间距为L1=4l0,右端间距为l2=l0。
今在导轨上放置AC、EF两根导体棒,质量分别为m1=2m0,m2=m0,电阻R1=4R0,R2=R0。
若AC棒以初速度v0向右运动,求AC棒运动的过程中产生的总焦耳热QAC,以及通过它们的总电量q。
10.如图所示,一个质量为、电阻不计、足够长的光滑形金属框架,位于光滑水平桌面上,分界线分别与平行导轨和垂直,两导轨相距。
在的左右两侧存在着区域很大、方向分别为竖直向上和竖直向下的匀强磁场,磁感应强度的大小均为。
另有质量也为的金属棒,垂直于放置在左侧导轨上,并用一根细线系在定点。
已知,细线能承受的最大拉力为,棒接入导轨间的有效电阻为。
现从时刻开始对形框架施加水平向右的拉力,使其从静止开始做加速度为的匀加速直线运动。
1.求从框架开始运动到细线断裂所需的时间;
2.若细线尚未断裂,求在时刻水平拉力的大小;
3.若在细线断裂时,立即撤去拉力,求此时框架的瞬时速度和此后过程中回路产生的总焦耳热。
 升级会员
升级会员 