异步电动机的直接转矩控制系统Word文件下载.doc
《异步电动机的直接转矩控制系统Word文件下载.doc》由会员分享,可在线阅读,更多相关《异步电动机的直接转矩控制系统Word文件下载.doc(29页珍藏版)》请在冰豆网上搜索。
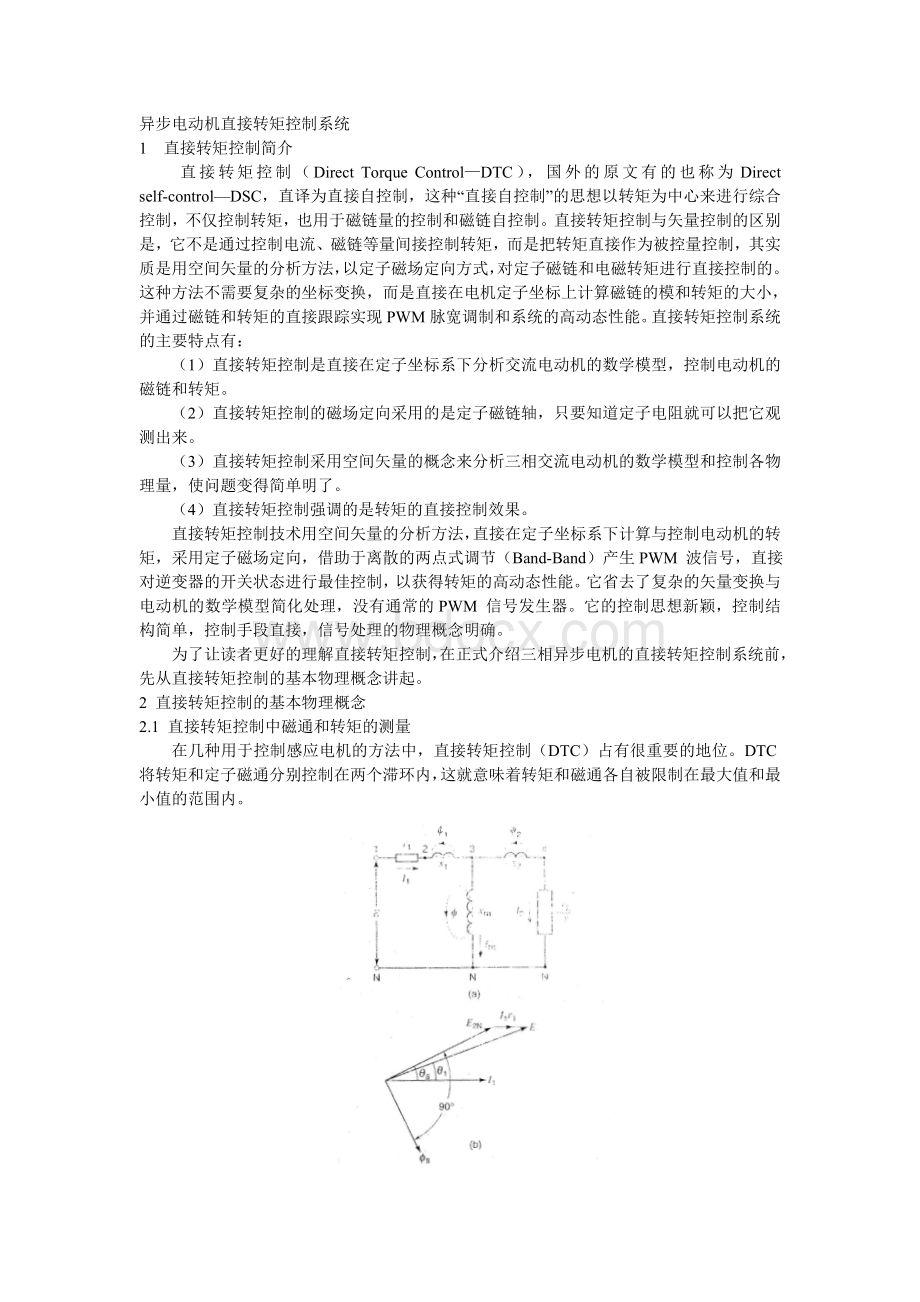
在解释DTC技术前,先要搞清楚磁通和转矩将如何测量。
图23.61a所示的电路为一个三相感应电机的单相等效电路,该等效电路接了一个正弦交流电源。
由图23.61a可见定子电阻、定子漏磁通、气隙磁通、转子漏磁通、电阻,其中电阻吸收了传输到转子的有功功率。
定子全磁通等于和之和,也就是。
推广到三相,转矩可以表达为
(13.9)
在点4和点N之间吸收的有功功率。
和流入定子点2和点N的有功功率相等,这是因为无功元件、、并不消耗有功功率。
因此可得
(23.6)
其中:
为提供给转子的有功功率(W);
为定子全磁通感应电压(V);
为定子电流(A);
为与的相位差。
不可测量,但是可以通过测量然后减去得到。
的大小正比于的大小,滞后90°
。
图23.61b所示的相量图表示了定子电流、定子电压以及定子电阻两端电压三者之间的关系。
当知道,以及时,根据式13.9和式23.6可以计算出转矩。
知道便可以得到。
在接下来的内容中,将忽略定子电阻。
2.2通过滞环来控制磁通和转矩
图23.62为感应电机供电的三相机械变流器
图23.62所示,一个三相感应电机由机械变流器供电。
该机械变流器由三个双刀开关组成,可以提供六个开关状态。
变流器连接到一个直流电压源。
开关的闭合和断开按照一个特殊的程序来执行。
和PWM技术不同的是,这个开关频率不是固定,而是根据转矩和定子磁通的瞬时值决定的。
期望的可以是上限和下限之间的任意值。
带宽越窄,磁通控制越准确。
这种控制方法常被称作砰砰控制或滞环控制。
当磁通下降到时,一个逻辑信号去切换变流器的开关状态以增大磁通。
同样地,当磁通上升到时,一个逻辑信号去切换变流器的开关状态以减小磁通。
假设转矩为期望值,当在滞环宽度内,开关状态不变。
按照上述方法,将在和之间不断波动。
相同的分析也可以用在转矩上,必须保持在和之间,如图23.62所示。
的额定值对应于和两者的平均值。
然而当电机运行在轻微过载的情况下,磁通并不需要运行在额定状态,此时可以减小以减少铁损。
为了做到这点,可以在不改变滞环宽度的前提下减小和。
2.3转速控制
转速的调节是通过控制转矩来实现的。
当转速低于期望值时,控制系统提高和,这样导致电机的转矩低于,此时系统将增大转矩,电机加速。
当转速达到期望值时,转矩将在新的和的设定值内波动。
同时,相同的开关状态使在和内。
2.4两相电机中磁场的生成
图23.63两相感应电机的原理图
如图23.62,当直流电压源接到变流器时,电机是如何产生一个旋转磁场的呢?
为了易于说明,可用两相电机来代替三相电机。
进一步将通过例题让读者更容易理解。
用相互垂直的X绕组、Y绕组来代替定子三相绕组,如图23.63所示。
每极有10匝绕组,因此和之间有总共20匝绕组。
和之间也是一样。
X绕组和Y绕组分别产生磁通和,假设每极磁通为25mWb。
图23.644个开关与两相电机绕组的连接情况
X绕组和Y绕组通过一个由4个开关组成的变流器连接到200V直流电压源上,如图23.64所示。
就X绕组而言,有四种连接到“+”“-”的方式。
和两端分别是(+-)、(-+)、(++)(--)。
当两端极性相同时,两端明显是短路。
因此这四种方式就只有三种不同的连接方式。
注意到X绕组不能开路,流过X绕组的电流在开关换流过程中不会断流。
相同的分析也可以用在Y绕组。
因此对于X和Y绕组就有3×
3种不同的连接到的“+”“-”的方式,这些连接方式可以用来改变和的幅值和方向。
例如在图23.63中为向右增大的,根据楞次定律可知端为正,端为负。
按照图26.63标示可以得出为正。
当电压源“+”和“-”两极连接到端和端,将是向右增大的。
根据法拉第定律可以得到
(2.24)
这里,。
因此可得,也就是等于(因为开关周期特别短,时间单位常采用毫秒)。
当为零(也就是短路),也就不变化,保持原值。
当连接到Y绕组使得,端为正,端为负,这就使得的变化率为,方向向上。
当连接到Y绕组使得,端为负,端为正,这就使得磁通的变化率为,方向向下。
例23-7在某个时刻,假设为,正号(+)表明的方向向右。
同时假设为,负号(-)表明的方向向下。
绕组X和Y与的连接方式突然变为如图23.65所示的那样。
图23.65例23-7中使用的图
请问
a定子磁通的初始大小及其方向
b后定子磁通的大小及其方向
解
a因为绕组X与绕组Y互差90°
,定子磁通的初始方向如图23.66所示。
图23.66(a)的初始位置;
(b)的最终位置(见例23-7)
b如图23.65所示,由于相对于为负,可知,的变化率为,方向向左。
然而由于,并不改变,保持为。
中的变化量为,可得后为。
在这中,先由降到0,然后反向变为,负号表示的方向向左。
可以看出,在中的方向角由变为,也就是顺时针旋转了,证明了可以通过开关的合适开通和关断可以生成一个旋转的磁场。
通过上述分析可见,欲改变绕组中的磁通,不是靠改变绕组中的电流,而是靠改变接入绕组的直流电压源电压大小和持续时间的乘积,即伏秒特性。
如直流电压源电压是固定的,则接入时间愈长,则磁通愈大。
2.5旋转磁场的生成
现在来说明图23.63中的两相电机如何生成旋转磁场。
为了把这个问题说清楚,将运用六步开关方式来进行分析。
和的额定值为。
第一步():
;
假设电机的初始磁通为零,也就是。
然后通过调整开关状态使得和。
将以的变化率向右增大,并在后达到额定值。
为了使得不超过额定值,在第一步结束的时候将和之间短路。
第二步():
当和之间仍保持短路的情况下,调整开关状态使得。
本来初始为零的将立即方向向上增大。
保持的情况下增大到的时间。
由于不能超过,所以在第二步结束的时候要将和之间短路,得的。
第三步():
这一步在X绕组上加负电压。
将以的变化率向左增大。
由于的初始值为,将在后变为零。
如果保持,将继续向左反向增大,在后变为。
此时将和之间短路。
第四步():
,将以的变化率向下反向增大。
后,此时将和之间短路。
第五步():
向右增大。
当达到时,此时将和之间短路。
第六部():
将以的变化率向上正向增大。
由于的初始值为,所以后变为零。
通过上述分析,可以看到正好旋转一周。
图23.67在不同时刻时磁通的幅值和方向
图23.68、、、的瞬时值
、、、的瞬时值如图23.68所示,和为矩形波,和为梯形波。
图23.67对于观察的空间方向特别有用处。
例如,在时,,,则
旋转一周的时间为,也就是说转速为每秒50转或。
从图23.67的正方形图中,可以看到4个角的可达到,大于额定值()40%,这种情况必须被校正。
2.6磁通的控制
通过为设置上下限,通过开关状态的配合切换可以获得一个更加接近圆形的磁通。
例如要把磁通限制在1pu(额定值)与1.12pu之间,可以以这两个值为半径做两个同心圆,选择适当的开关方式,使限制在和之间变化。
图23.69中一周开关切换20次,而图23.67中每周只有4次,但前者的精度保持在。
图23.69的运动轨迹
图23.70、、、的瞬时值
减小滞环宽度可以降低波动的范围。
如选择在1pu与1.06pu之间,可以获得的精度,但是旋转一周需要的开关次数变为44次。
由于一周时间仍为,则开关每秒钟需要切换的次数为44/20ms=2200次/s。
可见如果想获得高精度的,就需要提高开关的切换频率。
2.7旋转速度的控制
注意到换流次数的增加并不影响旋转一周需要的时间是非常关键的。
一旦的最小值定为,则旋转一周通常需要,平均旋转速度为。
旋转速度为
(23.37)
式中为的旋转速度,单位;
为直流电压源的电压值,单位;
为每极的额定磁通,单位;
为与电机结构有关的常数,如每极绕组的匝数
从式23.7可知,有两个方法可以改变的旋转速度:
1、改变;
2、改变。
降低可增加旋转速度。
若不变,则用于控制的伏秒值也不变。
增加,可相应减小时间。
若由增加到,则的旋转速度由增加到。
实际上,是固定的。
此外,第三种方法就是引入“零矢量”,即将X、Y绕组短接。
处在“零矢量”时,在此期间保持不动,这样就增加了旋转一周所需的时间。
如增加“零矢量”40个,每个,则旋转一周所需的时间由增加到。
2.8开关切换逻辑
想使磁通和转矩保持各自的滞环内(磁通在和之间,转矩在和之间),那该如何确定开关切换逻辑呢?
图23.71五个开关状态对的作用
图23.72五个开关状态对的作用
假设的瞬时值和位置如图23.71所示的,以的速度逆时针方向旋转。
另外假设电机转子以的速度逆时针方向旋转。
由于小于,必须通过开关切换使得回到滞环内。
可供选择开关状态共有五种,它们分别是
1让,使磁通向右。
2让,使磁通向左。
3让,使磁通向上。
4让,使磁通向下。
5让、,也就是将X绕组、Y绕组短路。
要使图23.71所示的回到滞环内,显然第2、第4两种开关状态要被排除。
第5种开关状态因为只能使得原地不动,故也被排除。
仅第1、第3两种开关状态可以选择。
到底选择第1、第3中哪一个,还要看的情况。
由图23.72可见,当时可选择第1种开关状态,顺时针方向旋转变为,与转子旋转方向相反,此时对转子制动。
当时可选择第3种开关状态,逆时针方向旋转变为,与转子旋转方向相同,对转子加速。
改变开关状态可使和在所要求的范围内
 升级会员
升级会员 