机电一体化考试题文档格式.docx
《机电一体化考试题文档格式.docx》由会员分享,可在线阅读,更多相关《机电一体化考试题文档格式.docx(8页珍藏版)》请在冰豆网上搜索。
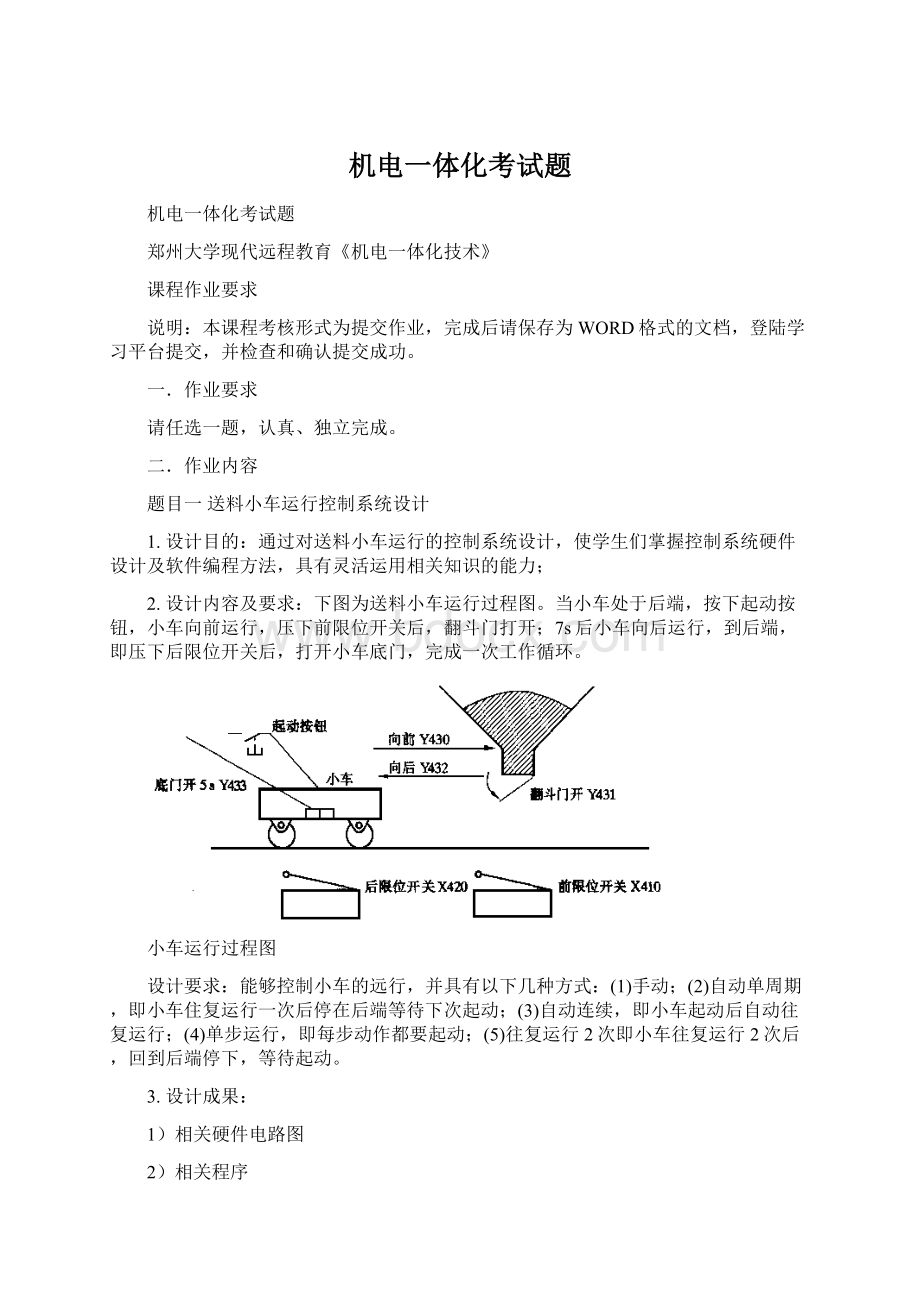
下图为送料小车运行过程图。
当小车处于后端,按下起动按钮,小车向前运行,压下前限位开关后,翻斗门打开;
7s后小车向后运行,到后端,即压下后限位开关后,打开小车底门,完成一次工作循环。
小车运行过程图
设计要求:
能够控制小车的远行,并具有以下几种方式:
(1)手动;
(2)自动单周期,即小车住复运行一次后停在后端等待下次起动;
(3)自动连续,即小车起动后自动往复运行;
(4)单步运行,即每步动作都要起动;
(5)往复运行2次即小车往复运行2次后,回到后端停下,等待起动。
3.设计成果:
1)相关硬件电路图
2)相关程序
题目二机械手控制系统设计
1.设计目的:
通过对机械手的控制系统设计,使学生们掌握控制系统硬件设计及软件编程方法,具有灵活运用相关知识的能力;
2.设计内容及要求:
要求根据机械手工作过程,设计出其控制系统
题目五双坐标十字滑台设计及控制
加深理解和掌握机电一体化、计算机接口技术、计算机控制技术、数控技术等课程的基本知识,提高学生综合运用所学知识能力
工作台行程:
工作台长度100mm;
宽度100mm;
脉冲当量:
0.005~0.008mm/P
其它参数如下表所列
1)相关计算
2)相关硬件电路图
3)相关程序
题目六四工位组合机床PLC控制系统设计
1、设计目的:
学生通过四工位组合机床课程设计,对所学课程理论知识进行一次系统的回顾检查复习和提高,并运用所学理论,,受到从理论到实践应用的综合训练,培养学生独立运用所学理论解决具体问题的能力。
2、设计内容及要求:
四工位组合机床由四个工作滑台,各带一个加工动力头,组成四个加工工位。
除了四个加工工位外,还有夹具、上下料机械手和进料器四个辅助装置以及冷却和液压系统共四部分。
工艺要求为由上料机械手自动上料,机床的四个加工动力头同时对一个零件进行加工,一次加工完成一个零件,通过下料机械手自动取走加工完的零件。
要求具有全自动、半自动、手动三种工作方式。
3、设计成果:
1)相关机械系统元件选择
题目七X-Y工作台机电一体化系统设计
1、设计目的:
通过X-Y工作台系统设计,使学生们掌握相关机电一体化系统机械系统设计、传感检测系统、执行系统、控制系统的设计方法,具有灵活运用相关知识的能力;
2、
设计内容及要求:
设计一套简易的微机控制X-Y工作台,固定在Z4012型12mm台式钻床的工作台上。
能批量加工最大面积为150×
100mm2的印刷电路板上许多孔,最大孔径可达6mm。
1)相关设计计算
题目八x向进给传动系统的滚珠丝杠
传动系统是机电一体化机械系统很重要的一部份内容,滚珠丝杠是高精传动的常用器件之一,通过学生对滚珠丝杠的设计,提高学生机械计算、查表和设计能力。
2.设计设计内容及要求:
根据给定条件,计算出所需滚珠丝杠的精度、载荷、所需直径等参数,结合相关手册,完成x向进给传动系统的滚珠丝杠,并完成相关校核。
工作台相关参数
工作台重量(kg)
220
交流伺服电机额定转速(min-1)
2000
夹具和工件重量(kg)
350
减速比
1
最大工作行程(mm)
600
支承面摩擦系数μ
0.003
最高速度(m/min)
20
失动量(mm)
0.01
加速时间(s)
0.15
全行程定位精度(mm)
±
0.008
减速时间(s)
重复定位精度(mm)
0.005
寿命(h)
20000
丝杠螺母副等摩擦力(N)
15
设电机惯量矩(kgm2)
2)滚珠丝杠设计图1份
题目九x向直线导轨设计
支撑导向是机电一体化机械系统关键性部件之一,直线导轨是高精加工设备常用导向支撑器件之一,通过学生对直线导轨的设计,提高学生机械计算、查表和设计能力。
根据给定条件,计算出所需直线导轨的精度、载荷等参数,结合相关手册,完成x向支撑导向系统的直线导轨,并完成相关校核。
导轨工作条件参数
工件质量(kg)
200
匀速行程(mm)
575
夹具和工作台质量(kg)
减速行程(mm)
12.5
进给速度(m/s)
0.17
导轨行程(mm)
X向切削力(N)
800
匀速时间(s)
3.38
Y向切削力(N)
Z向切削力(N)
加减速度、(m/s2)
10
重力加速度(m/s2)
9.8
加行程(mm)
1)相关设计计算过程
2)直线导轨设计图1份
题目十电子钟设计及控制
掌握MCS-51定时/计数器、中断系统初始化的编程方法,以及中断服务子程序、总体程序设计及其调试方法。
利用RAM/IO扩展8155联接键盘、显示器,利用定时器T0的模式1定时中断,控制电子钟走时,同时显示时、分、秒。
 升级会员
升级会员 