焊接夹具气缸动作的程序化设计Word格式.docx
《焊接夹具气缸动作的程序化设计Word格式.docx》由会员分享,可在线阅读,更多相关《焊接夹具气缸动作的程序化设计Word格式.docx(13页珍藏版)》请在冰豆网上搜索。
这种设计要求工人操作时要记牢操作顺序,否则就易出现安全问题或损坏工件。
2)利用接近开关(如在气缸上固定磁性环)提供气缸到位情况的信号。
这种设计,因为加入了电磁元件,使得气路复杂化。
3)仅利用气阀本身通过气路设计来识别气缸到位状态。
这种设计对一些复杂的焊接结构可以实现程序化。
本文以我公司皮卡车后厢门焊接夹具为例,阐述气缸动作的程序化设计在焊接夹具中的应用。
一、工艺过程分析
皮卡车后厢门总成主要有以下零部件组焊而成:
后厢门本体、侧板总成、后厢门内部加强板、铰链板等。
以侧板与后厢门本体的组焊为例:
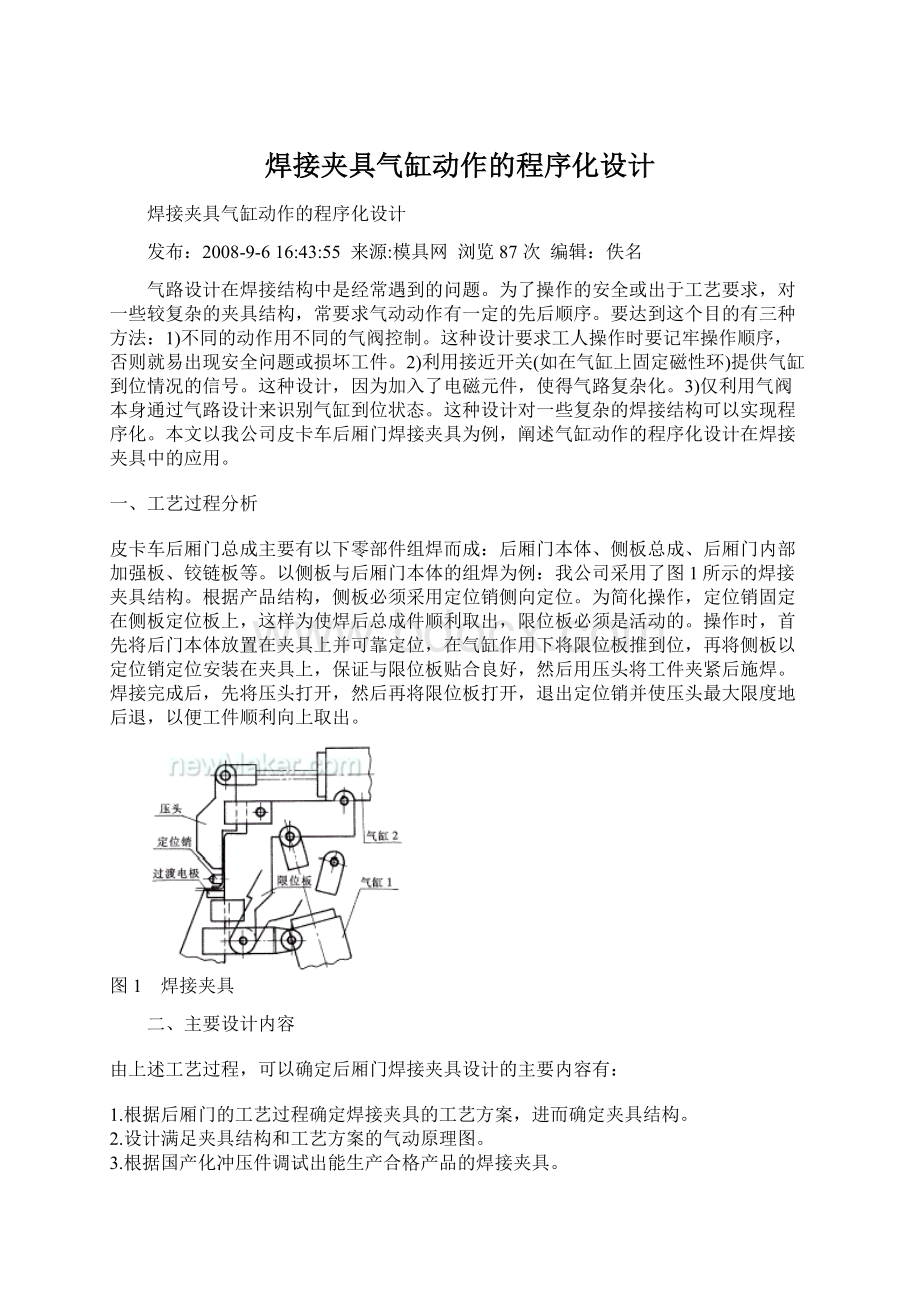
我公司采用了图1所示的焊接夹具结构。
根据产品结构,侧板必须采用定位销侧向定位。
为简化操作,定位销固定在侧板定位板上,这样为使焊后总成件顺利取出,限位板必须是活动的。
操作时,首先将后门本体放置在夹具上并可靠定位,在气缸作用下将限位板推到位,再将侧板以定位销定位安装在夹具上,保证与限位板贴合良好,然后用压头将工件夹紧后施焊。
焊接完成后,先将压头打开,然后再将限位板打开,退出定位销并使压头最大限度地后退,以便工件顺利向上取出。
图1 焊接夹具
二、主要设计内容
由上述工艺过程,可以确定后厢门焊接夹具设计的主要内容有:
1.根据后厢门的工艺过程确定焊接夹具的工艺方案,进而确定夹具结构。
2.设计满足夹具结构和工艺方案的气动原理图。
3.根据国产化冲压件调试出能生产合格产品的焊接夹具。
首先,根据产品结构,在气缸1推出时,气缸2必须处于缩入状态,否则侧板无法装入。
施焊完成后,在气缸1缩入时,气缸2也必须首先处于缩入状态,否则,就会将焊好的总成件拉坏。
由此可知,在设计气路图时必须保证:
1)夹紧工件时,气缸1先动,气缸2后动。
2)松开工件时,气缸2先动,气缸1后动。
也就是说,设计的气路图必须具有对气缸状态的识别功能。
在气缸状态不符合要求时,即在误操作的情况下,气动元件可以不理采外界输入的操作命令,而在执行操作命令时,气缸的动作必须按设计的程序进行,即气缸操作时实行程序化。
根据以上要求,设计了如图2所示的气动原理图,显然这个气路图达到了后厢门夹具的结构要求。
此气路图实现了对气缸状态的识别,也实现了气缸动作的程序化。
图2 气动原理图
两位五通电磁阀的工作原理
一、工艺过程分析皮卡车后厢门总成主要有以下零部件组焊而成:
二、主要设计内容由上述工艺过程,可以确定后厢门焊接夹具设计的主要内容有:
1.根据后厢门的工艺过程确定焊接夹具的工艺方案,进而确定夹具结构。
2.设计满足夹具结构和工艺方案的气动原理图。
3.根据国产化冲压件调试出能生产合格产品的焊接夹具。
首先,根据产品结构,在气缸1推出时,气缸2必须处于缩入状态,否则侧板无法装入。
1)夹紧工件时,气缸1先动,气缸2后动。
2)松开工件时,气缸2先动,气缸1后动。
也就是说,设计的气路图必须具有对气缸状态的识别功能。
根据以上要求,设计了如图2所示的气动原理图,显然这个气路图达到了后厢门夹具的结构要求。
气动执行元件和回路(图)
四、执行元件
气动系统中将压缩空气的压力转换成机械能,从而实现所要求运动的驱动元件,称为执行元件。
它分为气缸和气动马达两大类。
相对于液压和机械传动,它结构简单,维修方便。
但由于压缩空气的压力通常为0.3-0.6Mpa故而输出力小。
气缸是用压缩空气作动力源,产生直线运动或摆动,输出力或力矩做功的元件。
主要气缸主要类型和特点见附表2。
五、气动回路
(一)回路设计基础
1)路的构成(图4)
2)控制方式
(二)驱动回路
1.驱动气缸的基本回路
在通常使用的气缸中有单作用气缸和双作用气缸。
以下介绍驱动这些气缸的基本回路。
1)单作用气缸只在一个方向上的运动靠压缩空气驱动,靠弹簧力的作用回程。
图5为使用单作用气缸作往复运动的气路图。
换向阀(电磁阀)使用二位三通阀。
换向阀的P口与气源净化装置相连接,A口与气缸相连接。
速度控制阀接在换向阀与气缸之间。
速度控制阀有方向性,连接时不可接反。
回路的动作动原理如下:
在初始位置时,P口封闭,气缸的气缸盖一侧通过速度控制阀的单向阀和换向阀直接与大气相通。
气缸活塞靠弹簧力的作用停止于完全缩回的位置.当电磁阀通电换向时,气源通过速度控制阀给气缸供气,压缩弹簧使活塞前进.调整速度控制阀节流孔的大小,可以控制活塞前进速度.当电磁阀断电恢复到初始位置时,P口再次封闭,气缸内空气排出.活塞在弹簧力作用下后退并返回原点.这时气缸的速度不能控制.
2)双作用气缸的驱动回路
图6为使双作用气缸作往复运动的气路图。
换向阀使用二位五通阀(二位四通阀也可以),换向阀的P口与气源静化装置相连接。
A口与气缸杆一侧的接口相连,B口与气缸盖一侧的接口相连。
速度控制阀接在换向阀与气缸之间(注意方向与单作用气缸时相反)。
在初始位置时,P口与气缸杆一侧相通,另一方面,气缸盖一侧通过换向阀与大气相通。
这时气缸活塞处于后死点的位置上。
当电磁阀通电换向时,气缸盖一侧通压缩空气,气缸杆一侧空气排出,活塞前进。
活塞的速度由速度控制阀①调整。
当电磁阀断电回到初始位置时,气缸杆一侧充气,气缸盖一侧排气,活塞后退。
后退的速度由速度控制阀②调整。
2.气缸的速度控制回路
基于不同的目的和条件,可使用各种回路对气缸进行速度控制。
下面介绍通常使用的基本回路。
b)
入口节流式
这种方式通过调节供给气缸的流量,对气缸的速度加以控制。
图7示出了这种方式的路图。
来自换向阀的空气流过速度控制阀时,单向阀关闭,气流只有通过节流阀流向气缸,因为节流阀是可调的,所以通过调整节流阀便可设定气缸活塞的速度。
气流反向流动时,即从气缸一侧流向阀一侧时,单向阀打开,空气流量不受控制(自由流)。
在入口节流方式中,气缸出口一侧排气较快,因而容易受到所供气压变动的影响。
对于所加负载为变动负载的情况,速度稳定性差,因而除了特殊回路(例如防止失控回路等),一般都采用下面将要介绍的出口节流式。
c)
出口节流式
这种方式通过调节气缸的排气流量来控制气缸速度。
图8示出了这种方式的回路图。
注意,速度控制阀的方向与入口节流式相反。
来自换向阀的空气流过速度控制阀时,单向阀打开,于是成为自由流,气流在不受控制的情况下流向气缸。
而来自气缸一侧的空气使单向阀关闭,由节流阀调节流量,从而控制气缸活塞的速度。
在气缸的两个口都按出口节流式连接速度控制阀时,活塞靠两侧的压差(由排气一侧的速度控制阀调整)动作。
因此,在负载变动的情况下,它比入口节流方式有更好的速度稳定性。
出口节流是应用得最普通的方式。
d)
排气节流式
这种方式是将节流阀连接在换向阀的排气口上,调节排气的流量来控制气缸的速度。
因为气缸的进气气流不经过节流阀,所以不需要单向阀。
在调节排气流量来实现速度控制这一点上,它同出口节流式完全相同,不过,如果气缸与换向阀之间的管路较长,这一部分就成了气罐,使回路的响应变差,负载变动时,速度就会不稳定。
图9为排气节流式的回路图。
2.
基本回路,
应用各种机能不同的电磁换向阀,可以构成不同的驱动回路。
下面介绍几种基本的驱动回路。
a)单作用气缸的往复动作回路
图5所示的即为单作用气缸的往复动作回路。
但由于它是采用单向的入口节流方式,所以气缸活塞的速度只有在伸出时受到控制。
如果希望在缩回时(靠弹簧力作用)控制其速度,可以在换向阀与气缸之间,再反向串联一个速度调节阀,构成出口节流调速,或是在换向阀的R口上连接一个节流阀,构成排气节流方式。
双作用气缸往复动作回路
图6所示的即为双作用气缸往复动作回路。
这个回路中,使用的电磁阀是单电磁铁弹簧复位的,线圈通电时气缸伸出并保持在前死点位置。
一旦断电,电磁复位,气缸马上后退。
所以,它适用于遇到紧急情况(例如电源断电)希望气缸活塞返回初始位置的场合。
带自保持功能的双作用气缸往复动作回路
若希望在遇到紧急情况时气缸活塞能保持现行位置,可采用图10所示的回路。
与图6相比,这个回路只是用带自保持功能的双电磁铁电磁阀代替了弹簧复位的单电磁铁电磁阀。
这种电磁阀在一侧线圈通电切换后,它可以在遇到紧急情况(例如电源断电)时立即停止不动。
这种回路普遍用于卡紧物体或抓持重物的气动路中。
双气源供气回路
这是将气源分别连接到二位五通阀的R1、R2接口上使用的回路。
P口为公共排气口,气缸与电磁阀之间的连接与通常的连接相反。
图11示出了其回路图。
在诸如用气缸升降重物等场合,当气缸伸出、缩回时,负载会有较大的不平衡。
这时可采用这种双气源供气回路。
一般只对一个供气口(气缸上无负载作用的一侧)的压力进行减压,以取得压力(包括负载)平衡.由于一般调压阀空气不能反向流动,所以调压阀应接在电磁阀之前.此外,并不是所有种类的电磁阀都允许从R口供气,使用时要注意选择可从R口供气的电磁阀.
e)中途位置停止回路(中位封闭式)
图12示出了使用中位封闭式三位五通换向阀使气缸在中途任意位置停止的回路。
如果让线圈①,②交替通电,断电,那么,同使用二位五通阀时一样,气缸活塞将作往复运动。
在活塞运动过程中,如果两个线圈都断电,则电磁阀靠弹簧作用返回中位,接口全部被封闭。
气缸靠推力差(包括负载的气缸盖一侧同气缸杆一侧的推力差)少许移动一段后停止。
当无负载时,气缸杆一侧活塞的受压面积较小,所以气缸活塞往气缸杆一侧移动。
停止后,如果气缸、配管、电磁阀没有泄漏,活塞将保持在停止位置上,当线圈①或②再次通电时,活塞重新做前进或后退。
这样,虽然可以让活塞在中途停止,但由于空气有压缩性,所以不能期望有较高的停止精度。
此外,有的电磁阀(滑阀)允许有一
 升级会员
升级会员 