雷达系统导论5Word下载.docx
《雷达系统导论5Word下载.docx》由会员分享,可在线阅读,更多相关《雷达系统导论5Word下载.docx(18页珍藏版)》请在冰豆网上搜索。
b.杂波频谱展宽
这取决于于天线波束宽度及平台速度:
式中为天线波束宽度
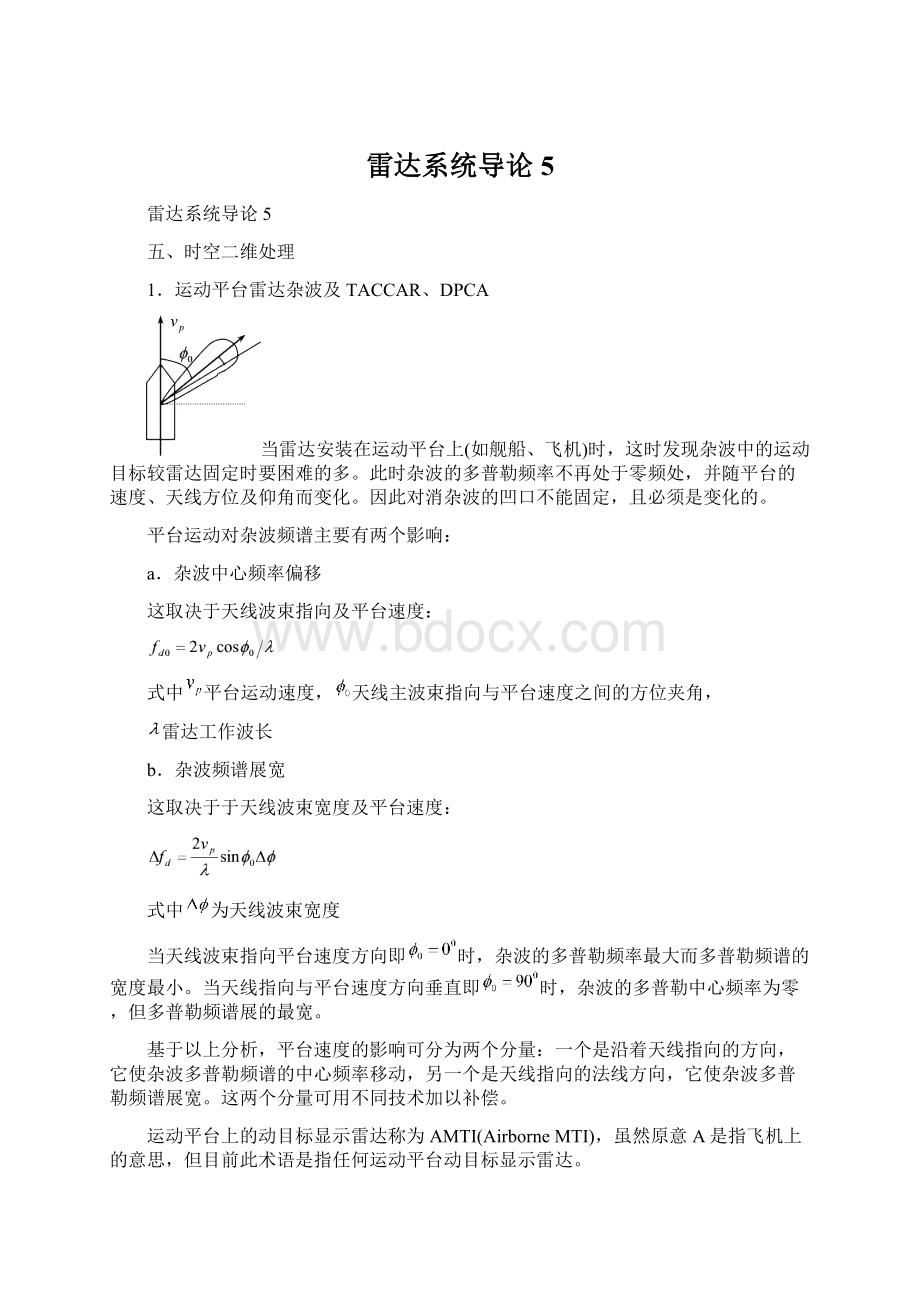
当天线波束指向平台速度方向即时,杂波的多普勒频率最大而多普勒频谱的宽度最小。
当天线指向与平台速度方向垂直即时,杂波的多普勒中心频率为零,但多普勒频谱展的最宽。
基于以上分析,平台速度的影响可分为两个分量:
一个是沿着天线指向的方向,它使杂波多普勒频谱的中心频率移动,另一个是天线指向的法线方向,它使杂波多普勒频谱展宽。
这两个分量可用不同技术加以补偿。
运动平台上的动目标显示雷达称为AMTI(AirborneMTI),虽然原意A是指飞机上的意思,但目前此术语是指任何运动平台动目标显示雷达。
A.杂波多普勒频移的补偿[3]p120
获取杂波多普勒频移的方法:
(1)在某些情况下,可利用装载雷达的平台速度及天线指向的先验知识,用开环控制的办法求补偿杂波的多普勒频移。
(主要适用于船载雷达)
(2)可对一定距离间隔内接收的回波信号采样,直接测量杂波频率,采样距离间隔应选择得使杂波成为起主导作用的信号。
通常,对若干脉冲重复周期的采样距离间隔得出的数据进行平均处理以得到平均的多普勒频移,仅进行单次多普勒测量并接着进行补偿是不能满足雷达的整个距离的实际状况的。
现有两种补偿多普勒频率(杂波锁定)的方法:
一种办法是改变相参振荡器(COHO)的频率以补偿杂波多普勒频率的移动,具体实现时可用将相参振荡器输出与频率可调振荡器混频的方法,并令频率可调振荡器的频率等于杂波的多普勒频率,如TACCAR。
另一种实现方法是在延时线对消器(对单个天线连续输出脉冲进行加权处理)的一个支路内加进可变移相器,用改变相移的方法求移动对消器频率响应的零值位置(对消器某支路的相移对应于频移)。
文[34]p236给出了两种方法的框图。
补偿运动雷达引起的杂波多普勒频移的主要技术有:
(1)杂波锁定动目标显示—塔卡TACCAR(Time-averaged-cluttercoherentairborneradar)
杂波锁定动目标显示系统:
能测量出在采样距离内杂波的平均多普勒频移,并用此测量结果使杂波平均多普勒频率能在所有其它的观测距离上,均与动目标显示多普勒滤波器频率响应的零值相重合。
杂波锁定动目标显示的一种形式叫“塔卡”TACCAR,它是时间平均相参机载雷达的缩写,原来是由麻省理工学院林肯实验室研制的一部机载雷达,由于此雷达的特征具有杂波锁定功能,故用此名代表杂波锁定技术。
其主要特点是在锁相环内采用了压控振荡器,即利用单路延迟相继回波信号相位差调整COHO频率以使杂波频谱落入两脉冲对消器的凹口。
它也是用在采样距离间隔内测量的杂波多普勒频率的平均值去校正杂波的多普勒频率。
单个环路TACCAR的改善因子见文[45]p33,文[34]p101给出了TACCAR框图。
TACCAR自动地把去杂波凹槽的中心对准被采样的距离范围内的杂波平均多普勒频率,它可用来对消任何固定的或移动的杂波源,因此不管雷达是固定的还是在一个移动平台上,在任何距离门范围内的地杂波、海杂波、气象杂波和箔条杂波TACCAR都能消除。
但它在一个特定距离范围上不能同时消除两个不同的杂波源,如气象杂波叠加在地杂波回波上时,TACCAR就不能同时消除这两个杂波[34]p236。
(2)动目标显示显示矩阵[31]
主要在数字动目标显示中采用。
(3)逐次逼近法[40][41]
同时给出若干个可能的多普勒频率校正值,然后选择在采样距离间隔内产生最小对消剩余的那个校正值。
(4)宽凹口抑制技术
用一种足够宽的凹口的多普勒处理器抑制掉杂波的多普勒频率,即使雷达平台在运动时也可作到这一点。
这只能用于第一盲速高(相应于雷达的工作频率低或重复频率高)和平台速度低的情况,只有船载雷达才能满足上述条件。
(5)自适应动目标显示AMTI(AdaptiveMTI)[42][43]
一般地说,当一个采样距离分辨单元内同时出现固定的和运动的杂波时,多数杂波锁定技术不能将这两种杂波都抑制掉。
自适应动目标显示则不受此限制,它能对任何形式的杂波进行自适应。
应用与天线中旁瓣对消相类似的技术,让各零值自适应地对准在强杂波的频率上。
注:
非相参MTI不需要进行运动补偿。
B.杂波多普勒展宽的补偿[3]p120—DPCA(DisplacedPhaseCenterAntenna)
在分析天线辐射方向图和实验数据的基础上,Staudaher给出了雷达平台运动引起的杂波频谱展宽的标准偏差[44]:
式中是垂直于天线波束指向的速度的水平分量,是有效的水平孔径宽度,且假定天线波束宽度近似为。
上式推导过程如下[44]中译文p7~93:
对窄波束情形,当杂波多普勒频移完全补偿后,杂波散射体呈现的径向速度与同一距离天线主波束线的径向速度之差为:
式中
对应的多普勒频率为:
,由此构成杂波展宽谱,这种近似的前提条件是天线波束很窄,此时的非线性关系可简化为线性关系,从而使得外界方位上杂波的分布与所形成的杂波谱严格地一致。
杂波谱被天线双程功率方向图所加权,通常天线方向图可由余弦函数、高斯函数或辛克函数来近似,若天线方向图用高斯函数近似,则杂波谱对应可近似为高斯频谱:
当时,天线双程功率方向图为,式中为半功率点波束宽度,可用近似表示,其中为有效的水平口径宽度,则得
假如杂波回波的平均多普勒频移得到完全的补偿,并假定杂波是高斯形频谱,则采用脉冲对消器时杂波展宽对改善因子的限制为:
若将平台运动产生的杂波频谱展宽与杂波内部运动产生的杂波频谱展宽合并起来,得总的杂波频谱标准偏差,则总杂波频谱改善因子为:
如果杂波频谱展宽仅仅是由于雷达平台的运动速度造成的,则若让雷达天线看起来象静止的,就可减缓雷达平台运动的影响。
这可用相距一定距离的两个分离天线来实现,此距离应为(假设已补偿了杂波多普勒频移,而仅用于补偿杂波频谱展宽,若将两者结合起来应满足条件为详见以下分析),其工作方式是:
一个脉冲由前面的天线发射,另一个脉冲由后面的天线发射,所以这两个脉冲由不同的天线发射,而接收是空间的同一点。
其结果是雷达天线似乎是静止的,此技术称为移动相位中心技术(简称DPCA)。
此外还可利用两个辐射器改变反射式天线的相位中心并产生两个偏斜重叠的波束,对和差波束进行适当组合可补偿平台运动[3]p122。
DPCA杂波对消可在时域或频域进行,此外还存在自适应DPCA(ADPCA)。
一般文献均以克服雷达平台运动而引起杂波谱展宽的观点讨论DPCA技术,下面从时空二维滤波的观点加以分析,说明DPCA是一种最简单的二维信号处理[46][47]。
为补偿载机运动引起的地杂波谱展宽的影响,上世纪六十年代就提出了DPCA技术,它将天线相位中心相对于机身作偏置调整,而相对于大地则处于静止状态。
设如右图所示侧面放置的两个天线阵元,其中延时为脉冲重复周期,则左、右阵元接收远场地杂波信号为:
、
式中,指数上为系考虑收发双程。
取之差得:
对应可得DPCA的二维滤波响应特性为:
将上式二维滤波的幅度特性画出可得凹口沿下列直线分布:
,即
若取,则该直线方程为,这正好是地杂波谱,即这样的滤波特性对地杂波有良好的抑制性能。
上面讨论的是两天线沿正侧面放置情形,更一般情况是两天线连线与平台速度矢量有一定夹角,此时地杂波谱为斜椭圆,对凹口为直线的滤波特性,两者是失配的,其杂波抑制性能变差。
上述DPCA系统是一种最简单的二维信号处理,空域只有两个阵元,时域只用两个脉冲,若采用多阵元的阵列及多脉冲,类似于陆基MTI滤波器设计可构成复杂的滤波特性(如简单地采用二项式加权或Emerson加权等),使之与杂波谱更好的匹配。
同样,也可采用改善因子分析各种误差对DPCA性能的影响[48]p437~439。
对舰载HFSWR接收阵元共用一个发射天线,故只需考虑接收单程的路程差,则阵元空域相位差系数应为,相应条件为,并且为抑制一阶Bragg海杂波(频率为),必须采用三脉冲、三阵元并附加特定相移。
2.时空二维自适应处理Space-TimeAdaptiveProcessing(STAP)[49]
AEW雷达中强的地杂波谱被展宽且时变,这使得常规MTI失效。
主要问题是运动目标回波在频域上被淹没在多普勒展宽的杂波中,使得单纯的频域滤波器无法滤除与运动目标具有相同多普勒频率的杂波。
然而另一方面频率相同的杂波、目标一般是来自不同的方向,即在空域上这两者存在差异(差异较小即方位差小于波束半功率宽度,不足以利用空域滤波区分)。
由于平台运动,杂波具有时空耦合的二维谱,因此最佳的杂波抑制应该由一个同时工作在时间、空间域上的滤波器来实现。
这样的时间—空间滤波器要求对回波场同时作空间和时间采样,这可用具有阵列天线的相干脉冲多普勒雷达来实现。
天线的阵元提供空间采样,而相干脉冲串则实现了回波场的时间采样。
1973年,Brennan[50]等人首先提出了一般概念和原理,说明二维联合处理比通常的时空级联处理性能要好得多,但其设备量和运算量十分惊人。
他提出了用时空二维取样进行雷达自适应处理的方法,并在高斯噪声加确知有用信号(即时间和空间角频率已知)模型下,根据最大似然比理论导出了二维自适应最佳处理器结构。
1976年,Brennan[51]等人首先把最佳处理器应用到机载雷达中。
A.时空二维自适应处理的基本原理[46][47]
设为第个阵元的第次快拍(snapshot)数据(,),第个阵元的时序向量为,定义数据矢量():
设数据矢量(其中、分为信号矢量、杂波和噪声矢量),则零均值杂波和噪声矢量的协方差矩阵为:
按信噪比最大准则,系统的最佳权值为(类似于最大改善因子准则下点多普勒处理器的最优加权。
对高斯分布杂波而言,信噪比最大对应于虚警率一定情况下的最大检测概率):
式中为非零的复常数。
一般信号矢量未知,故常取作导引矢量(steeringvector)用以对某锥角和某多普勒频率进行检测。
导引矢量由空间形成的波束(用DBF)和时域的窄带多普勒滤波(用DFT)所构成,若设两个矢量分别为:
式中和分别为阵元间和脉冲间相应和时的角相移,和为对空域和时域矢量的幅度加权,则导引矢量为(其中表示Kronecker直积)
由于杂波加噪声的协方差阵是正定的Hermitian矩阵,故可作特征分解,不妨设其大特征值有个,即,而其余个特征值均近似等于噪声方差,即,则
式中为对应于特征值的特征矢量,故
上式表明最佳权矢量是向量组的线性组合,即系统只需要个自由度,就可有效地抑制杂波。
由此可见正确估计杂波协方差矩阵的大特征值个数相当重要。
B.杂波协方差矩阵的估计
为了计算自适应的最佳权值,首先应计算杂波协方差矩阵。
一般是在检测单元的邻近单元(距离单元或时域脉冲组单元)得到个数据矢量样本,采用下式估计:
邻近参考单元的选择必须满足独立同分布(IID)的条件,同时,为使因估计不准确而带来的信噪比损失不超过,参考单元数应比矩阵阶数大一倍以上[52]。
参考单元应围绕检测单元选取,时间上可复用,但为满足IID条件,只能以个脉冲为一组,且各组的雷达工作条件相同。
一般参考单元满足IID有困难,但至少必须与检测单元具有相同的谱结构。
阵列信号处理中有关超分辨算法都需要估算阵列协方差矩阵,文[53]p56~58总结了协方差矩阵的不同估计方法,
 升级会员
升级会员 