自动控制单选题参考答案汇总文档格式.docx
《自动控制单选题参考答案汇总文档格式.docx》由会员分享,可在线阅读,更多相关《自动控制单选题参考答案汇总文档格式.docx(33页珍藏版)》请在冰豆网上搜索。
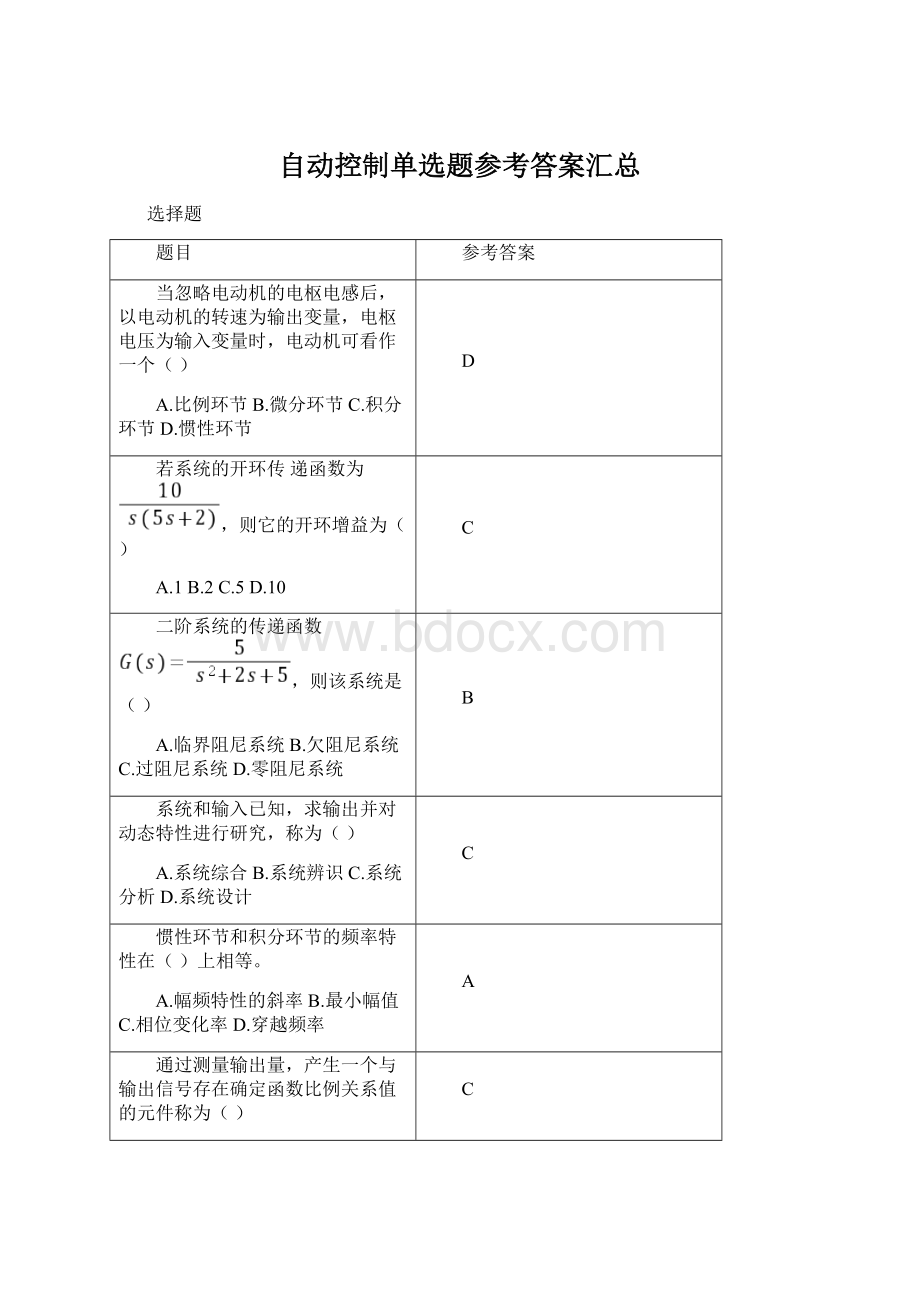
惯性环节和积分环节的频率特性在()上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率
A
通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为()
A.比较元件B.给定元件C.反馈元件D.放大元件
ω从0变化到+∞时,延迟环节频率特性极坐标图为()
A.圆B.半圆C.椭圆D.双曲线
若保持二阶系统的ζ不变,提高ωn,则可以()
A.提高上升时间和峰值时间B.减少上升时间和峰值时间
C.提高上升时间和调整时间D.减少上升时间和超调量
一阶微分环节,当频率时,则相频特性为()
A.45°
B.-45°
C.90°
D.-90°
最小相位系统的开环增益越大,其()
A.振荡次数越多B.稳定裕量越大
C.相位变化越小D.稳态误差越小
设系统的特征方程为,则此系统()
A.稳定B.临界稳定C.不稳定D.稳定性不确定。
某单位反馈系统的开环传递函数为:
,当k=()时,闭环系统临界稳定。
A.10B.20C.30D.40
设系统的特征方程为,则此系统中包含正实部特征的个数有()
A.0B.1C.2D.3
单位反馈系统开环传递函数为,当输入为单位阶跃时,则其位置误差为()
A.2B.0.2C.0.5D.0.05
若已知某串联校正装置的传递函数为,则它是一种()
A.反馈校正B.相位超前校正
C.相位滞后—超前校正D.相位滞后校正
在直流电动机调速系统中,霍尔传感器是用作()反馈的传感器。
A.电压B.电流C.位移D.速度
系统已给出,确定输入,使输出尽可能符合给定的最佳要求,称为()
A.最优控制B.系统辨识C.系统分析D.最优设计
与开环控制系统相比较,闭环控制系统通常对()进行直接或间接地测量,通过反馈环节去影响控制信号。
A.输出量B.输入量C.扰动量D.设定量
稳态误差ess与误差信号E(s)的函数关系为()
A.B.
C.D.
在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是()
A.减小增益B.超前校正C.滞后校正D.滞后-超前
相位超前校正装置的奈氏曲线为()
A.圆B.上半圆C.下半圆D.45°
弧线
在系统对输入信号的时域响应中,其调整时间的长短是与()指标密切相关。
A.允许的峰值时间B.允许的超调量
C.允许的上升时间D.允许的稳态误差
主要用于产生输入信号的元件称为()
某典型环节的传递函数是,则该环节是()
A.比例环节B.积分环节C.惯性环节D.微分环节
已知系统的微分方程为,则系统的传递函数是()
引出点前移越过一个方块图单元时,应在引出线支路上()
A.并联越过的方块图单元B.并联越过的方块图单元的倒数
C.串联越过的方块图单元D.串联越过的方块图单元的倒数
8.设一阶系统的传递,其阶跃响应曲线在t=0处的切线斜率为()
A.7B.2C.D.
时域分析的性能指标,哪个指标是反映相对稳定性的()
A.上升时间B.峰值时间C.调整时间D.最大超调量
二阶振荡环节乃奎斯特图中与虚轴交点的频率为()
A.谐振频率B.截止频率C.最大相位频率D.固有频率
设系统的特征方程为,则此系统中包含正实部特征的个数为()
一般为使系统有较好的稳定性,希望相位裕量为()
A.0~15B.15~30C.30~60D.60~90
设一阶系统的传递函数是,且容许误差为5%,则其调整时间为()
A.1B.2C.3D.4
某一系统的速度误差为零,则该系统的开环传递函数可能是()
A.B.C.D.
单位反馈系统开环传递函数为,当输入为单位斜坡时,其加速度误差为()
A.0B.0.25C.4D.
A.相位超前校正B.相位滞后校正C.相位滞后—超前校正D.反馈校正
确定根轨迹大致走向,一般需要用()条件就够了。
A.特征方程B.幅角条件C.幅值条件D.幅值条件+幅角条件
某校正环节传递函数,则其频率特性的奈氏图终点坐标为()
A.(0,j0)B.(1,j0)C.(1,j1)D.(10,j0)
直接对控制对象进行操作的元件称为()
A.给定元件B.放大元件C.比较元件D.执行元件
A.比例环节B.惯性环节C.积分环节D.微分环节
已知系统的单位脉冲响应函数是,则系统的传递函数是()
A.B.C.D.
梅逊公式主要用来()
A.判断稳定性B.计算输入误差
C.求系统的传递函数D.求系统的根轨迹
已知二阶系统单位阶跃响应曲线呈现出等幅振荡,则其阻尼比可能为()
A.0.6B.0.707C.0D.1
A.允许的稳态误差B.允许的超调量
C.允许的上升时间D.允许的峰值时间
设一阶系统的传递,其阶跃响应曲线在t=0处的切线斜率为()
A.7B.2C.D.
若系统的传递函数在右半S平面上没有零点和极点,则该系统称作()
A.非最小相位系统B.最小相位系统C.不稳定系统D.振荡系统
某系统的闭环传递函数为:
A.2B.4C.6D.8
开环传递函数为,则实轴上的根轨迹为()
A.(-4,∞)B.(-4,0)C.(-∞,-4)D.(0,∞)
系统的传递函数,其系统的增益和型次为()
A.5,2B.5/4,2C.5,4D.5/4,4
A.相位滞后校正B.相位超前校正C.相位滞后—超前校正D.反馈校正
进行串联超前校正前的穿越频率与校正后的穿越频率的关系,通常是()
A.=B.>
C.<
D.与无关
.已知系统开环传递函数,则与虚轴交点处的K*=()
A.0B.2C.4D.6
A、B是高阶系统的二个极点,一般当极点A距离虚轴比极点B距离虚轴大于()时,分析系统时可忽略极点A。
A.5倍B.4倍C.3倍D.2倍
开环控制系统的的特征是没有()
A.执行环节B.给定环节
C.反馈环节D.放大环节
主要用来产生偏差的元件称为()
某系统的传递函数是,则该可看成由()环节串联而成。
A.比例、延时B.惯性、导前C.惯性、延时D.惯性、比例
已知,其原函数的终值()
A.0B.∞C.0.75D.3
在信号流图中,在支路上标明的是()
A.输入B.引出点C.比较点D.传递函数
设一阶系统的传递函数是,且容许误差为2%,则其调整时间为()
A.1B.1.5C.2D.3
二阶欠阻尼系统的有阻尼固有频率ωd、无阻尼固有频率ωn和谐振频率ωr比较()
A.ωr>ωd>ωnB.ωr>ωn>ωdC.ωn>ωr>ωdD.ωn>ωd>ωr
单位反馈系统开环传递函数为,当输入为单位阶跃时,其位置误差为()
A.2B.0.2C.0.25D.3
.当输入为单位斜坡且系统为单位反馈时,对于II型系统其稳态误差为()
A.0B.0.1/kC.1/kD.
A.相位滞后校正B.相位超前校正C.微分调节器D.积分调节器
.根据系统的特征方程,可以判断系统为()
A.稳定B.不稳定C.临界稳定D.稳定性不确定
某反馈系统的开环传递函数为:
,当()时,闭环系统稳定。
A.B.C.D.任意T1和2
在系统中串联PD调节器,以下那一种说法是错误的()
A.是一种相位超前校正装置B.能影响系统开环幅频特性的高频段
C.使系统的稳定性能得到改善D.使系统的稳态精度得到改善
根轨迹渐近线与实轴的交点公式为()
C.D.
直流伺服电动机—测速机机组(型号为70SZD01F24MB)实际的机电时间常数为()
A.8.4msB.9.4msC.11.4msD.12.4ms
随动系统对()要求较高。
A.快速性B.稳定性C.准确性D.振荡次数
“现代控制理论”的主要内容是以()为基础,研究多输入、多输出等控制系统的分析和设计问题。
A.传递函数模型B.状态空间模型C.复变函数模型D.线性空间模型
主要用于稳定控制系统,提高性能的元件称为()
A.比较元件B.给定元件C.反馈元件D.校正元件
某环节的传递函数是,则该环节可看成由()环节串联而组成。
A.比例、积分、滞后B.比例、惯性、微分
C.比例、微分、滞后D.比例、积分、微分
A.0
 升级会员
升级会员 