选取一个模糊控制的实例讲解Word文档格式.docx
《选取一个模糊控制的实例讲解Word文档格式.docx》由会员分享,可在线阅读,更多相关《选取一个模糊控制的实例讲解Word文档格式.docx(12页珍藏版)》请在冰豆网上搜索。
最优控制方法是基于状态反馈,但能实现输出指标最优的一种控制方法,方法和参数调节较简单,有着广泛的应用。
模糊控制有不依赖于数学模型、适用于非线性系统等优点,所以本文尝试了用模糊控制对倒立摆进行控制,以将先进的控制方法用于实际中。
同时,对倒立摆系统的研究也将遵循从建模到仿真到实控,软硬件结合的系统的控制
流程。
在这过程中,借助数学工具Matlab7及仿真软件Simulink,作了大量的仿真研究工作,仿真结果表明系统能跟踪输入,并具有较好的抗干扰性。
最后对实验室的倒立摆装置进行了软、硬件的调试,获得了较好的控制效果。
三.实验步骤:
1.一级倒立摆系统模型的建立
在忽略了空气阻力、各种摩擦之后(这也是为了保证Lagrange方程的建立),可
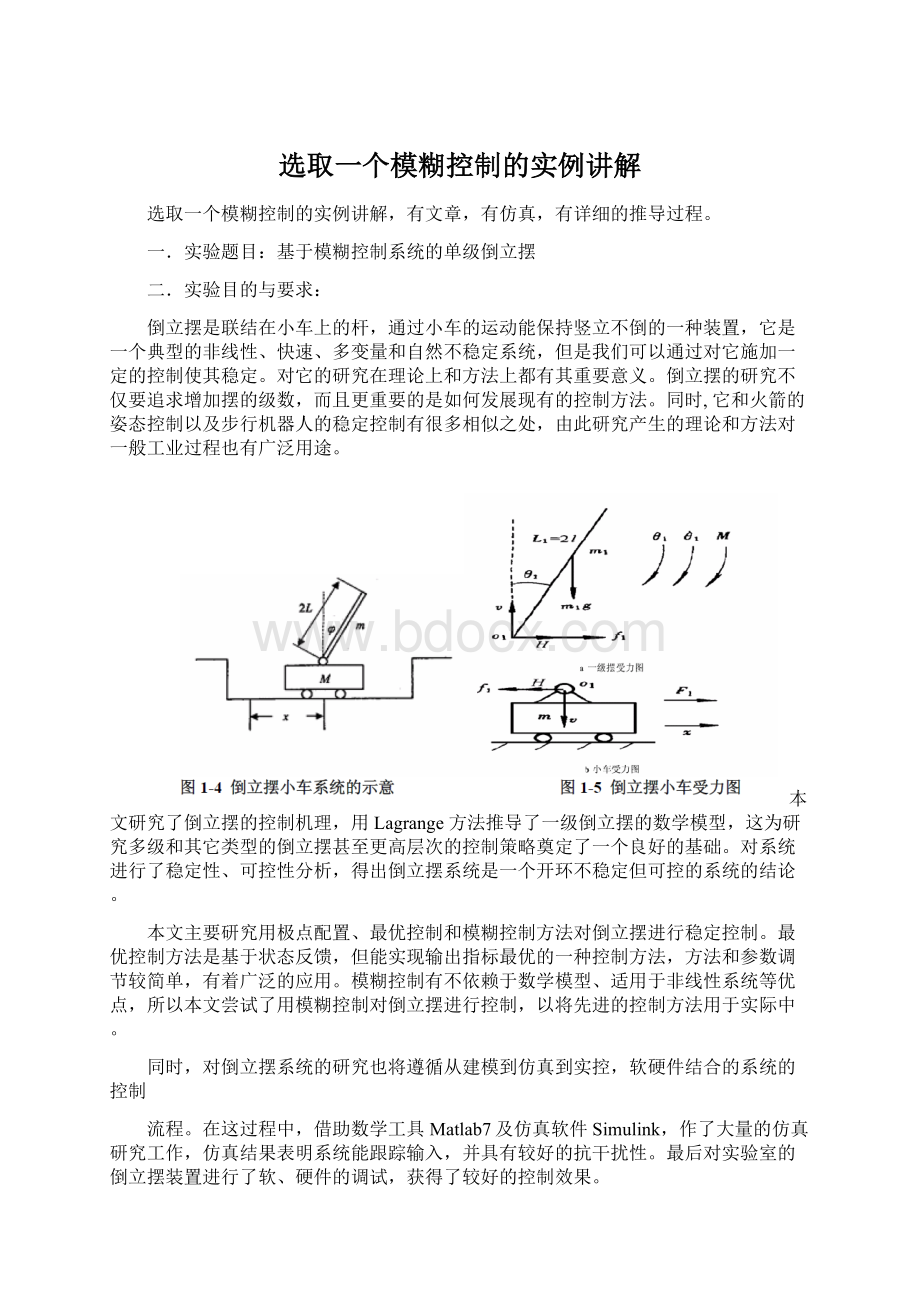
将一级倒立摆系统抽象为由小车和匀质杆组成的系统,本系统设定如下:
小车质量M;
摆杆质量m,长为l;
小车在x轴上移动;
摆与竖直方向夹角为θ,规定正方向如图所示;
加在小车x轴上的力为F;
拉格朗日算子L是系统动能Ec和势能Ep之差,拉格朗日方程由拉格朗日算子L
和广义坐标qi(i=1,2,3⋯n)表示如下:
Fi为系统沿该广义坐标方向上的外力,D为由摩擦而消失的能,本系统中可认为D=0;
本系统有两个广义坐标分别是x、θ。
整个系统(车+摆)移动时的动能:
其中v代表摆重心的速度矢量,重心位移为(x轴方向)(y轴方向)
于是:
,
系统势能是摆重心的势能:
于是拉格朗日算子;
于是根据自由度q(t)=x(t)的拉格朗日方程如下:
(1-1)
同理,可获得根据自由度q(t)=θ(t),的拉格朗日方程如下:
因广义坐标θ方向上无外力作用,即
即拉格朗日方程为:
(1-2)
由于倒立摆在平衡过程中摆角幅度很小,设竖直向上方向为θ=0,则在竖直方向附近摆角不大的范围内,可近似认为
于是(1-1)、(1-2)式可线性化为:
整理成状态空间方程形式,可得
(其中取u=F)(1-3)
实际系统的参数为:
M=1Kg,m=0.1Kg,l=0.5m,g≈10m/s2
2.一级倒立摆系统性能分析
单级倒立摆系统的的开环特征根用matlab的p=eig(A)语句计算得
{005.6745-5.6745}
这说明开环系统有一个极点在∣S∣平面右半平面,有两个极点在原点,因此系统是不稳定的。
根据线性系统理论系统{A,B,C,D}能控,满秩,即rankQ0=k,在matlab里可以编辑m文件,求解系统的能控阵、能观阵,求它们的秩,从而判断系统的能控性、能观性。
对于(3)式所表示的系统求得所以系统开环虽不稳定,但状态完全能控,这为实现倒立摆的稳定控制提供了理论依据。
计算一级倒立摆线性动态方程开环特征根、能控性矩阵过程作为实验结果1。
3.状态反馈和极点配置法
设控制对象状态方程为:
控制系统的各种特性以及其各种品质指标很大程度上由其闭环系统的零点和极点的位置决定。
极点配置法的控制原理就是设计状态反馈律中的K矩阵,使反馈闭环后的系统:
具有所需要的极点配置。
即闭环特征方程:
为所期望的极点。
下面给出Gura-Bass算法的步骤:
1判断Σ(A,B)的完全可控性。
确定能否完成预定的闭环极点配置综合目标。
2由给定的动态指标或闭环极点要求确定闭环特征多项式的n个系数βi。
3确定开环系统的特征多项式。
4求变换阵L=
能控阵Q=
5状态反馈阵K由下式求出
采用状态反馈方法使系统稳定并配置极点,
带入系统的物理参数M=1Kg,m=0.1Kg,l=0.5m,g≈10m/s2
得到系统矩阵A和输入矩阵B为
由上面分析可知,倒立摆系统有在复平面右半平面的特征根,所以该系统是不稳定的。
也就是说,u=0时,倒立摆系统是不稳定的系统;
同时也意味着当x非零时,总存在将x转移至零的控制作用,亦即系统的状态是能控的。
根据线性系统理论,不稳定的系统应用状态反馈,可使反馈后的系统的特征根,即矩阵(A-BK)的特征值,位于复平面的左半平面,从而使闭环系统稳定。
亦即可使摆杆垂直且使小车处于基准位置,达到稳定状态;
完全能控的系统可以通过对状态反馈矩阵的适当选择,使系统的极点按性能指标得到任意期望的配置。
对于上述倒立摆系统根据Gura-Bass算法配置其闭环极点,使其阶跃响应满足:
过渡过程时间ts,超调量σ%%<
5%。
首先要将期望的性能指标转化为复平面上极点的位置。
其思路就是根据经验公式和性能指标确定一对主导闭环极点,然后将非主导极点放在复平面上远离主导极点的地方。
根据系统的动态指标超调量σ%<
5%,过渡过程时间ts<
3s,以及二阶系统极点与动态指标的关系:
可以求得期望的系统闭环主导极点为:
p1=-2+2i,p2=-2-2i,因为原系统是四阶的,所
以选取另外两个非主导极点为-20和-80。
此程序作为实验结果2。
4.一级倒立摆系统的最优控制器设计
倒立摆系统是一个单输入双输出系统,被控系统的输入量是施加在小车上的力或小车的加速度,输出量是摆杆的角度和小车的位移。
最优控制信号虽然实际上也是一个状态反馈信号,但是在性能指标J最小的意义下求得的,与极点配置法的状态反馈不一样。
下面用Matlab中的lqr函数,求最优控制器对应的K。
lqr函数允许我们选择两个参数——R和Q,这两个参数用来平衡系统对输入量和状态量的敏感程度。
最简单的情况是假设R=1,Q为单位矩阵。
当然,也可以通过改变Q矩阵中的非零元素来调节控制器以得到期望的响应。
5.一级倒立摆的模糊控制器仿真设计
设定系统的初始状态为:
下(相当于摆的初始倾斜角度为0.1rad,车和摆的速度为0,小车的位置在x=0处)
为使摆不取决于小车的位置x而处于垂直位置,可以在零设定点调节角位置θ(t)。
因此模糊控制器呈现两个输入θ和,以及反馈力输出F,相应的Simulink模型见图5-1所示。
目标信号见图5-2,扰动信号见图5-3。
5-25-3
倒立摆模糊控制Simulink模型:
5-1
所建立的模糊推理系统:
输入θ的隶属函数:
输入的隶属函数:
输出f的隶属函数:
对小车位移和摆角正方向的定义,建立如下的模糊规则:
5.模糊控制器初始化,先新建空白页,运行Untitled1.m,再在Commandwindow输入fuzzy,导入,然后在Commandwindow输入test.fis,Test=readfis('
Test.fis'
再仿真。
四.实验结果:
实验结果1:
从图中可以看出,小车位置以及摆杆角度都是发散的,开环系统不稳定。
实验结果2:
从图中可以看出,系统的快速性很好,过渡过程时间不超过3秒,并且响应过程中只振荡了一次,超调量也非常小,基本满足最初的设计要求
实验结果3:
注;
黄色为角度,红色为角速度。
从图中看出,系统的输出角度曲线可以跟踪目标信号,抗干扰性也比较好。
 升级会员
升级会员 