并联机构总结.docx
《并联机构总结.docx》由会员分享,可在线阅读,更多相关《并联机构总结.docx(34页珍藏版)》请在冰豆网上搜索。
并联机构总结
并联机构总结
CNKI2011.6-2011.12
题目:
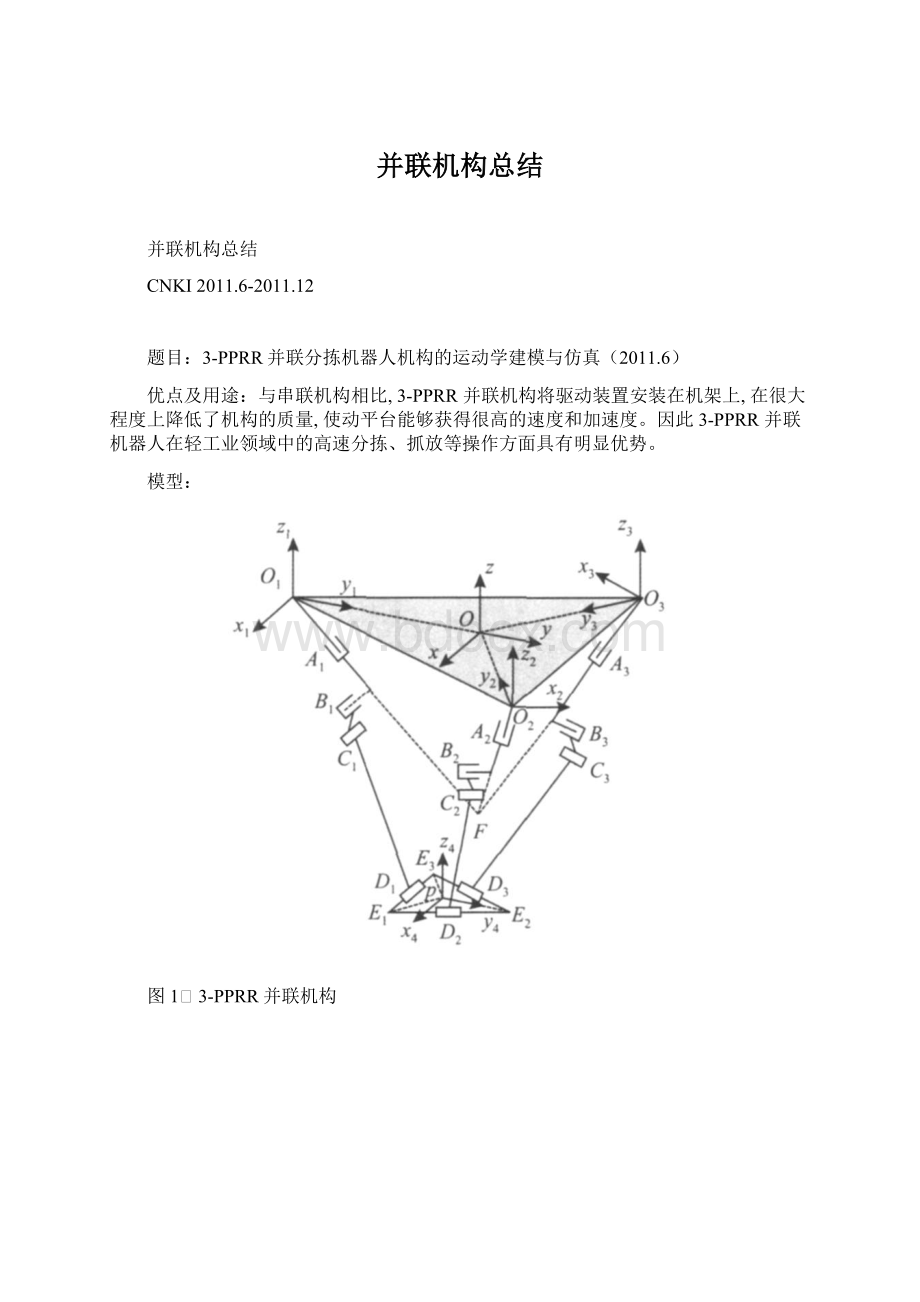
3-PPRR并联分拣机器人机构的运动学建模与仿真(2011.6)
优点及用途:
与串联机构相比,3-PPRR并联机构将驱动装置安装在机架上,在很大程度上降低了机构的质量,使动平台能够获得很高的速度和加速度。
因此3-PPRR并联机器人在轻工业领域中的高速分拣、抓放等操作方面具有明显优势。
模型:
图13-PPRR并联机构
图2单支链示意
题目:
3-PRRU并联机构的解析雅可比矩阵
优点及用途:
模型:
题目:
3-PRR平面并联机构精度分析
优点及用途:
模型:
题目:
3-PRR微动操作机器人刚度及工作空间分析
优点及用途:
模型:
题目:
3-PRS并联式钻尖刃磨机床运动学研究
优点及用途:
模型:
题目:
3PTT串并联数控机床构型设计与位姿分析
优点及用途:
模型:
题目:
3-RPS并联机构运动与静力特性分析*
优点及用途:
模型:
题目:
3—RRC机器人的动力学分析探究
优点及用途:
模型:
题目:
3-RRR型并联机构运动学研究
优点及用途:
模型:
题目:
3-RUC并联机构的运动分析
优点及用途:
该机构对称性好,加工方便、造价低且易于控制。
模型:
题目:
3-UPS/S并联转台球铰链的优化研究
优点及用途:
模型:
题目:
3-UPU-SPS并联机构及关节的分析*
优点及用途:
提出了一种新型三平移一转动4自由度空间并联机构,分析了机构运动输出特性,并计算了机构的自由度和
耦合度,给出了该并联机构的正、反解,并讨论了该机构的工作空间。
模型:
题目:
3DOF并联机构的分析
优点及用途:
模型:
题目:
优点及用途:
模型:
题目:
4SPS+UPU并联机床法向加工自由曲面的研究与仿真
优点及用途:
模型:
题目:
6-PUS/UPU并联机器人冗余驱动力控制仿真
优点及用途:
模型:
题目:
6-RSS并联机构的运动学、动力学分析
优点及用途:
模型:
题目:
6-TPS并联坐标测量机结构设计与实体建模
优点及用途:
模型:
题目:
PRS-XY混联数控机床运动学仿真件开发
优点及用途:
模型:
题目:
RRRUPRRRPUR球面转动并联机构运动学分析
优点及用途:
模型:
题目:
Tricept并联机构的奇异性分析
优点及用途:
模型:
题目:
Tripod并联定位器刚度分析及其在飞机装配中的应用
优点及用途:
模型:
题目:
并联6-UPS稳定平台瞬态分析与谱分析
优点及用途:
模型:
题目:
车辆并联机构座椅三维减振研究
优点及用途:
模型:
题目:
3-RRR并联机
优点及用途:
模型:
题目:
二平移并联机构位置分析及运动学仿真
优点及用途:
模型:
题目:
基于Adams的3-(2SPS)并联机构的配重平衡分析
优点及用途:
模型:
题目:
基于ADAMS的3-P4R并联打磨机器人运动学仿真
优点及用途:
模型:
题目:
基于Matlab技术的4-RP(RR)R并联机构的运动仿真
优点及用途:
模型:
题目:
基于反螺旋理论的2-PTR&PSR并联机器人的
奇异位形研究
优点及用途:
模型:
题目:
一种新型6PTS并联机器人工作空间分析
优点及用途:
模型:
题目:
一种新型3-RPR并联机构及其运动学分析
优点及用途:
模型:
题目:
二自由度球面并联换档机构运动学分析及仿真
优点及用途:
模型:
题目:
风洞模型并联机构工作空间分析与仿真
优点及用途:
模型:
题目:
混合驱动柔索并联机器人的设计与分析
优点及用途:
模型:
题目:
混联式石材加工机械手3-TPS/TP型
工作头的运动特性分析
优点及用途:
模型:
题目:
基于概率分布的3-UPU机构误差影响敏感度*
优点及用途:
模型:
题目:
基于几何法的3-PCR平移并联分拣机器人工作空间研究
优点及用途:
模型:
题目:
髋关节试验机中3SPS+1PS并联机构有限元分析
优点及用途:
模型:
题目:
一种3-PRP共平面并联微动平台的研究
优点及用途:
模型:
题目:
优点及用途:
模型:
题目:
一种2SPS+UPR并联机构的位置与工作空间分析
优点及用途:
模型:
题目:
一种新型2T2R并联机构及其运动学分析
优点及用途:
模型:
题目:
一种新型3-UPS并联机构及其工作空间分析
优点及用途:
模型:
题目:
一种2PUU+2PUS并联机构的位置与工作空间分析
优点及用途:
模型:
题目:
一种两转动一平移并联机构的运动学分析
优点及用途:
模型:
题目:
新型并联运动振动筛的筛分效率及其试验研究*
优点及用途:
模型:
题目:
平面2自由度并联机构弹性振动的最优控制
优点及用途:
模型:
题目:
优点及用途:
模型:
题目:
优点及用途:
模型:
题目:
优点及用途:
模型:
 升级会员
升级会员 