中南大学计算机控制系统复习题及答案Word文件下载.doc
《中南大学计算机控制系统复习题及答案Word文件下载.doc》由会员分享,可在线阅读,更多相关《中南大学计算机控制系统复习题及答案Word文件下载.doc(7页珍藏版)》请在冰豆网上搜索。
3.用长除法或Z反变换法或迭代法求闭环系统的单位阶跃响应。
4.已知低通数字滤波器,求D(z)的带宽ωm;
并求当输入E(z)为阶跃
信号时数字滤波器的控制算法。
取采样周期T=2ms。
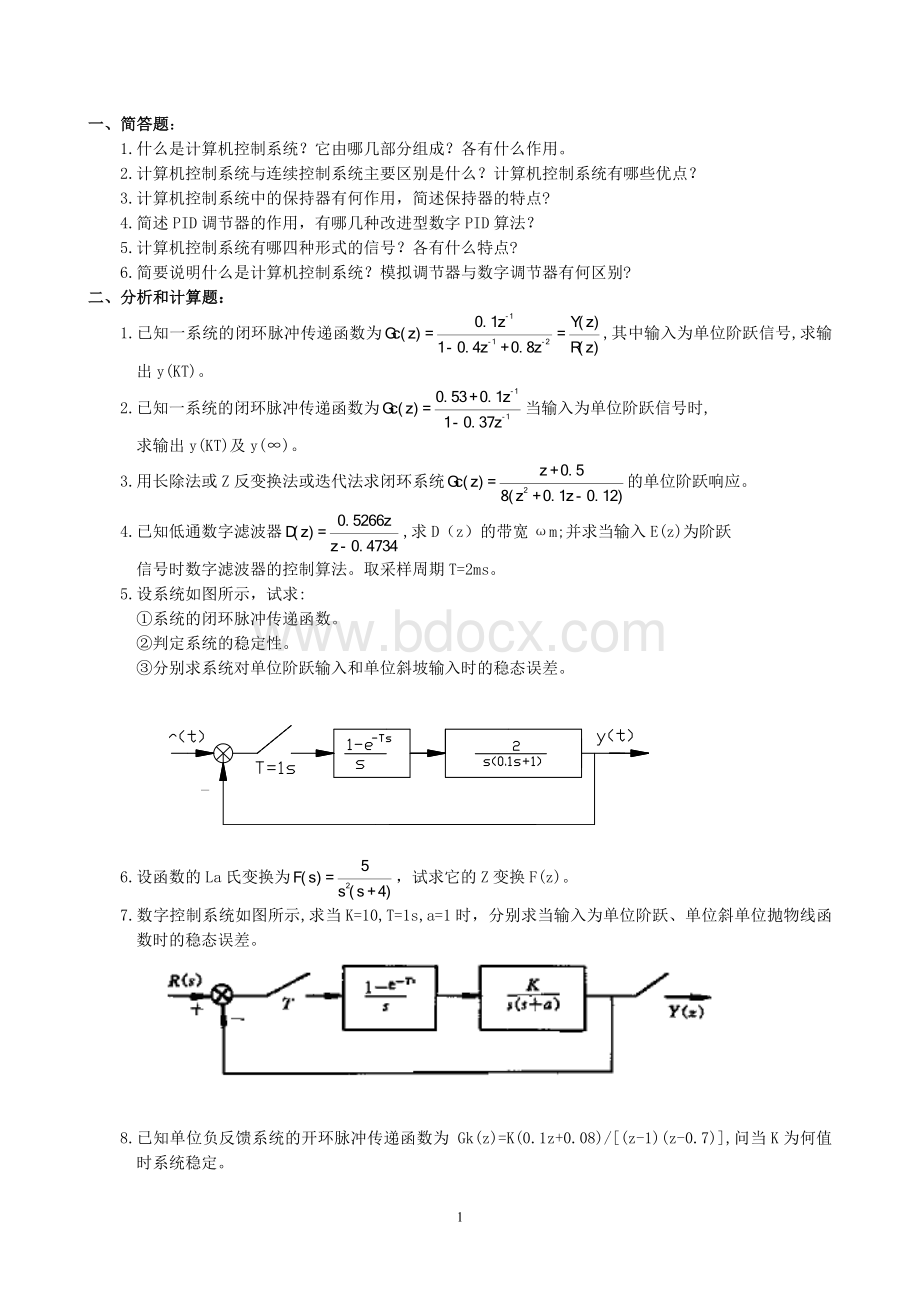
5.设系统如图所示,试求:
①系统的闭环脉冲传递函数。
②判定系统的稳定性。
③分别求系统对单位阶跃输入和单位斜坡输入时的稳态误差。
6.设函数的La氏变换为,试求它的Z变换F(z)。
7.数字控制系统如图所示,求当K=10,T=1s,a=1时,分别求当输入为单位阶跃、单位斜单位抛物线函数时的稳态误差。
8.已知单位负反馈系统的开环脉冲传递函数为Gk(z)=K(0.1z+0.08)/[(z-1)(z-0.7)],问当K为何值时系统稳定。
9.已知系统单位负反馈的开环传递函数为:
问:
K为何值时系统稳定?
10.已知单位反馈系统的广义对象的Z传递函数为:
试按最少拍无波纹设计原则设计单位阶跃输入时,计算机的调节模型D(z),并求其控制算法。
11.已知连续系统的传递函数G(s)=(s+1)/[s(s+2)]试用冲击不变法求其等效的Z传递函数.
12.已知离散系统的Z传递函数:
试求离散系统的状态方程和输出方程。
13.已知离散系统的Z传递函数:
14.已知离散系统的差分方程为
输出为y(k),试写出它们的状态方程和输出方程.
15.已知离散系统的状态空间表达式,初始状态X(0)=0
试求系统的Z传递函数:
。
16.已知,写出与它相对应的PID增量型数字控制算法。
(T=1s)
17.已知广义对象的z传递函数:
HG(z)=(z+0.5)/〔(z-0.9)(z-0.4)〕,取采样周期T=1s,试设计PI调节器D(z)=Kp+Ki/(1-z-1),使速度误差ess=0.1,取采样周期T=1s。
并求控制算法u(kT)?
D(z)=U(z)/E(z)。
18.已知被控对象的传递函数;
G(s)=1/〔s(s+2)〕,采用零阶保持器,取采样周期T=0.1,试设计单位阶跃作用下的最少拍调节器。
19.已知单位负反馈系统被控对象的传递函数:
G(s)=2/(s+2),采用零阶保持器,取采样周期T=1s,试设计单位阶跃作用下的最少拍调节器D(z),并求其调节时间ts,控制算法u(kT)。
7
参考答案
1.答:
计算机控制系统又称数字控制系统,是指计算机参与控制的自动控制系统,既:
用算机代替模拟控制装置,对被控对象进行调节和控制.控制系统中的计算机是由硬件和软件两部分组成的.硬件部分:
计算机控制系统的硬件主要是由主机、外部设备、过程输入输出设备组成;
主机:
通常包括中央处理器(CPU)和内存储器(ROM,RAM),它是控制系统的核心。
内存储器中预先存入了实现信号输入、运算控制和命令输出的程序,这些程序就是施加被控对象的调节规律。
外部设备:
操作台,又称为人机联系设备,通常包括CRT显示器和键盘、专用的操作显示面板或操作显示台等。
打印和制表装置:
主要包括有打印机相绘图机。
磁盘设备:
一般称为外存储器,它兼有输入和输出两种功能,用来存放程序和数据存储器的后备存储设备。
通信设备;
报警设备:
用来显示被控对象的非正常工作状态。
过程输入输出设备计算机与被控对象是用过程输入输出,它在两者之间进行信息传递和变换。
二、软件部分:
软件是各种程序的统称,通常分为系统软件和应用软件。
2.解:
用计算机代替模拟控制装置,对被控对象进行调节和控制.计算机采用的信号是数字信号,因此为了信号匹配,在计算机与被控对象之间采用模/数转换器(A/D)和数/模转换器(D/A),以实现
两种信号之间的相互转换。
计算机控制系统的优点
(1)控制规律灵活,可以在线修改。
(2)可以实现复杂的控制规律,提高系统的性能指标.
(3)抗干扰能力强,稳定性好。
(4)可以得到比较高的控制精度。
(5)能同时控制多个回路,一机多用,性能价格比高。
(6)便于实现控制、管理与通信相结合,提高工厂企业生产的自动化程度.
(7)促进制造系统向着自动化、集成化、智能化发展。
3.解:
保持器的原理是,根据现在时刻或过去时刻输入的离散值用常数、线性函数或抛物函数数形成输出的连续值。
它的插值公式:
m代表阶保持器。
通常m=0和m=1分别称为零阶保持器和一阶保持器。
零阶保持器的幅频特性和相频特性有如下特性:
(1)低通特性:
保持器的输出随着信号频率的提高,幅值迅速衰减。
(2)相位滞后持性:
信号经过零阶保持器会产生相位滞后,它对控制系统的稳定性是不利的。
4.解:
PID调节器的控制作用有以下几点:
(1)比例系数Kp,直接决定控制作用的强弱,加大Kp可以减少系统的稳态误差,提高系统的动态响应速度.过大会使动态质量变坏,引起被控制量振荡甚至导致闭环系统不稳定
(2)在比例调节的基础上加上积分控制可以消除系统的稳态误差,因为只要存在偏差,它的积分所产生的控制量总是用来消除稳态误差的,直到积分的值为零,控制作用才停止。
但它将使系统的动态过程变慢,而且过强的积分作用会使系统的超调量增大,从而使系统的稳定性变坏;
(3)微分的控制作用是跟偏差的变化速度有关的。
微分控制能够预测偏差.产生超前的校正作用。
它有助于减少超调,改善系统的动态性能。
改进型数字PID有:
积分分离算法,遇限停止积分法,不完全微分算法,微分项的输入滤波,不对设定值产生微分作用,具有不灵敏区的PID算法
5.解:
在计算机控制系统中,通常既有连续信号也有离散信号,这些信号一般是指信息流,而不是
能量流.既:
(1)连续模拟信号:
时间和信号的幅值都是连续的。
(2)阶梯模拟信号:
时间是连续的,信号的幅值是阶梯形的。
(3)采样信号:
时间是离散的,信号的幅值是连续的脉冲信号。
(4)数字信号:
信号的时间以及幅值都是离散的,且幅值经过了量化处理。
6.答:
用算机代替模拟控制装置,对被控对象进行调节和控制.控制系统中的计算机是由硬件和软件两部分组成的.硬件部分.内存储器中预先存入了实现信号输入、运算控制和命令输出的程序,这些程序就是施加被控对象的调节规律。
计算机采用的信号是数字信号,因此为了信号匹配,在计算机与被控对象之间采用模/数转换器(A/D)和数/模转换器(D/A),以实现两种信号之间的相互转换。
模拟调节器一般可以是电气的,机械的,气动的,液压的等元器件组成;
其控制量均为时间的连续函数。
1.解:
K=0y(0)=0
K=1y(T)=0.1
K=2y(T)=0.14
Y(kT)=0.37y(kT-T)+0.53r(kT)+0.1R(kT-T)
r(kT)=1k≧0
y(∞)=lim(z-1)[(0.53z+0.1)/(z-0.37)][z/(z-1)]=1
Z→1
令:
D(z)频率特性:
零频值:
由此得:
①
②系统稳定。
③a.
b.
6.解:
7.解:
1单位阶跃输入:
ess=0
2单位斜坡阶跃输入:
ess=0.1
3单位抛物线输入:
ess=∞
8.解:
9.解:
特征方程:
由舒尔科恩得:
系统不稳定。
10.解:
11.解:
.
12.解:
13.解:
14.解:
15.解:
16.解:
用双线性变换:
17.解:
Kp=3.6Ki=0.4
18.解:
19.解:
HG(z)=Z[H(s)G(s)]=(1-z-1)Z[2/(s(s+2))]=0.865z-1/(1-0.135z-1)
Ge(z)=1-z-1Gc(z)=z-1D(z)=(1.156-0.156z-1)/(1-z-1)=U(z)/E(z)
Y(z)=Gc(z)R(z)=z-1/(1-z-1)=z-1+z-2+z-3+…
∴ts=1(秒)
U(kT)=U(kT-T)+1.156e(kT)-0.156e(kT-T)
 升级会员
升级会员 