实训项目9 双臂机器人装配.docx
《实训项目9 双臂机器人装配.docx》由会员分享,可在线阅读,更多相关《实训项目9 双臂机器人装配.docx(30页珍藏版)》请在冰豆网上搜索。
实训项目9双臂机器人装配
实训项目9双臂机器装配工作站
1、在ROBOTSTUDIO中进行机器人及周边设备的合理布局。
2、在ROBOTSTUDIO中的工具的使用
3、Smart组件的使用
4、机器人IO信号的设定与链接
5、机器人轨迹的创建
6、机器人编程、仿真调试。
机器人工作站的布局
所有的部件已包含在打包文件中。
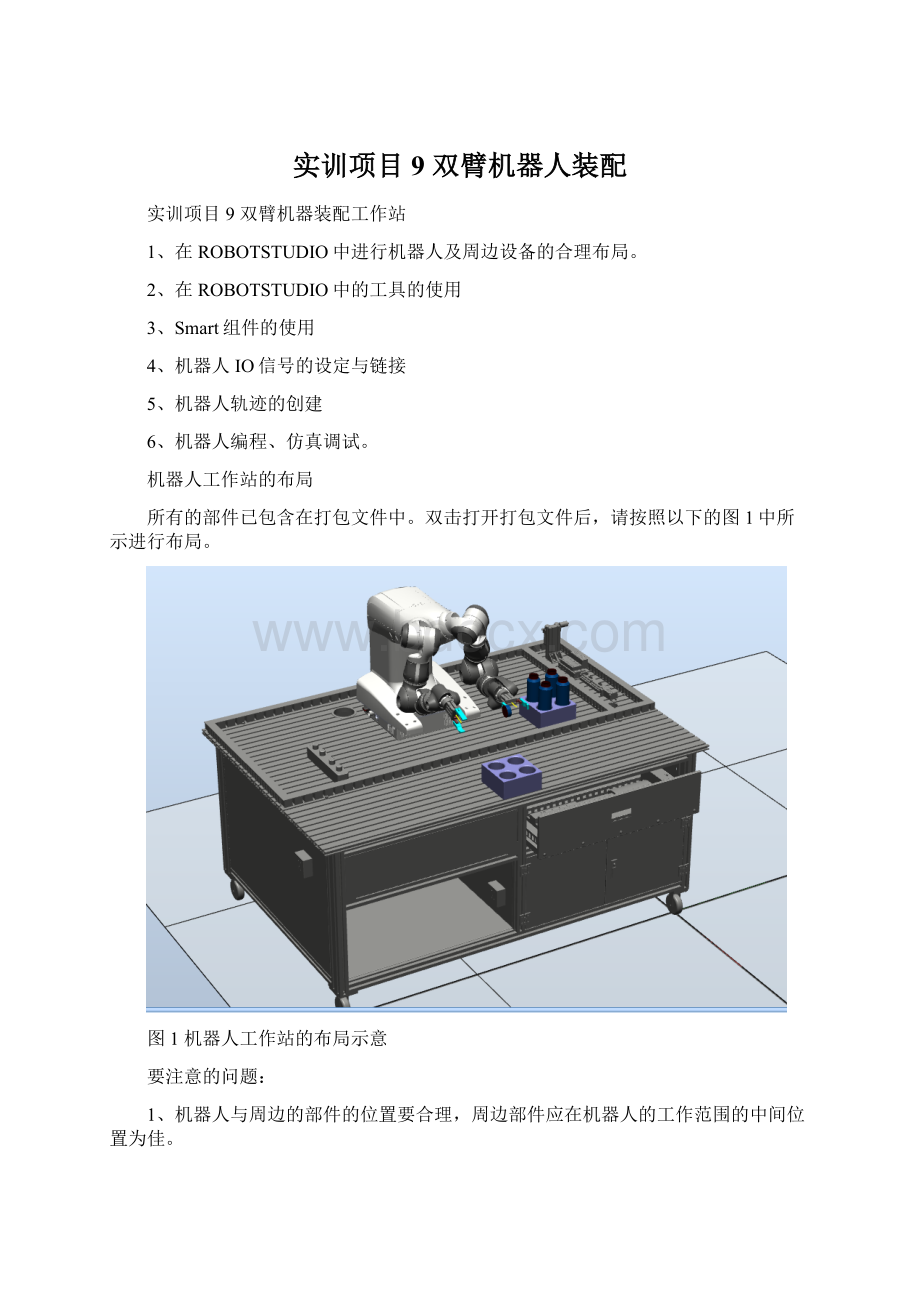
双击打开打包文件后,请按照以下的图1中所示进行布局。
图1机器人工作站的布局示意
要注意的问题:
1、机器人与周边的部件的位置要合理,周边部件应在机器人的工作范围的中间位置为佳。
2、可以对机器人的操作,以确认机器人可以到达要取、放的最远端是可以顺利到达的,否则以后再调整就会很麻烦了。
Smart组件的基本使用
在本项目中我们需要建立三个smart组件来支持完成这次的项目内容,现在对这三个组件进行简单的说明:
STool_L:
主要功能是左臂的夹具夹取的动态效果。
STool_R:
主要功能是右臂的夹具夹取的动态效果。
STool:
主要功能是右臂和左臂的夹、取的属性,以完成工件被工具的作用。
详情看视频,操作说明如下:
建模---smart组件---添加组件
。
注:
STool_R和STool_L的组件编辑步骤基本一致
STool的组件
机器人IO的设定
为了实现真夹具动作的夹/放的动作控制,为了至少需要设定一个虚拟的数字输出信号,这个信号只用于虚拟仿真的作用,并没有与实际的总线或IO板进行关联。
数字输出信号的设定菜单操作为:
控制器---配置编辑器---IOSYSTEM---SIGNAL。
然后将信号设定为以下的表1的参数:
机器人轨迹的创建
机器人的动作是从左侧的码垛盘存放处搬运到右边的的方形的码垛盘处。
具体的操作方法如下:
1、设置正确的工件坐标与工具,如下图所示:
2、根据具体的情况,设定正确的机器人运动指令的参数,如下图所示:
3、根据动作的要求通过示教指令的方法,创建对应的轨迹程序,程序样板如下图所示:
T_ROB_L机器人程序模板
MODULEModule1
CONSTrobtargetphome_l:
=[[-563.451929379,982.029785215,232.601048304],[0.066012106,0.84242027,-0.111217294,0.523069025],[0,0,0,11],[107.815864494,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetpick_L_1h:
=[[-503.599237428,1300.382600486,210.673683472],[0.505448359,-0.507268636,-0.494061246,-0.49305575],[-1,-2,0,11],[107.72481651,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetpick_L_1:
=[[-503.599520007,1300.382104399,105.777189938],[0.505448232,-0.507268559,-0.494061516,-0.493055689],[-1,-2,0,11],[107.724832302,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetplace_LW:
=[[-52.117887865,930.079466801,365.631589077],[0.228935001,-0.652189216,0.681163242,-0.241359959],[-2,1,-2,11],[107.724644984,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetplace_L_1:
=[[-47.831471455,854.021612335,118.453730857],[0.027203377,0.694879493,-0.031194138,0.717934115],[-2,-1,0,11],[107.724382066,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetTarget_70:
=[[-47.831671726,854.022133648,232.29250899],[0.027203345,0.694880017,-0.031194381,0.717933598],[-2,-1,0,11],[107.724373014,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetplace_LW_h:
=[[-52.117706711,962.064273394,365.631272923],[0.2289349,-0.652189063,0.681163525,-0.241359669],[-2,1,-2,11],[107.724670321,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetTarget_110:
=[[-213.252289392,1154.63138987,365.630542088],[0.228934017,-0.652189326,0.681164046,-0.241358326],[-2,1,-1,11],[107.724630468,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetplace_L_1_h:
=[[-47.831671726,854.022133648,232.29250899],[0.027203345,0.694880017,-0.031194381,0.717933598],[-2,-1,0,11],[107.724373014,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetpick_L_2h:
=[[-594.815880861,1300.383663051,207.280955466],[0.505448832,-0.507268539,-0.494060529,-0.493056083],[-1,-2,0,11],[107.724784596,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetpick_L_2:
=[[-594.594483025,1300.38308068,105.777439294],[0.50544744,-0.507269012,-0.494060954,-0.493056598],[-1,-2,0,11],[107.724911143,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetpick_L_3h:
=[[-503.598281871,1392.112162236,207.181113459],[0.505448081,-0.507268695,-0.494061033,-0.493056187],[-1,-2,0,11],[107.724915602,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetpick_L_3:
=[[-503.598480067,1392.563749952,105.777323632],[0.505448129,-0.507269058,-0.494060627,-0.493056172],[-1,-2,0,11],[107.724866174,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetpick_L_4h:
=[[-595.027611551,1392.112963941,226.45405647],[0.505448376,-0.507268479,-0.494060793,-0.493056348],[-1,-2,0,11],[107.72482448,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetpick_L_4:
=[[-594.704498836,1392.564639421,105.777487461],[0.505448286,-0.507269026,-0.494060737,-0.493055933],[-1,-2,0,11],[107.724896059,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetplace_L_2:
=[[-47.830689209,943.114595011,118.453898613],[0.027203583,0.694879306,-0.031194065,0.717934291],[-2,-1,0,11],[107.724327246,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetplace_L_3:
=[[-141.629695488,854.80336666,118.452852353],[0.02720258,0.694880268,-0.031194438,0.717933382],[-2,-1,0,11],[107.724255632,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetplace_L_4:
=[[-141.628760171,945.865466118,118.452996978],[0.027202193,0.694880274,-0.031194914,0.717933369],[-2,-1,0,11],[107.724284535,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetTarget_10:
=[[-53.060576741,897.84276421,363.154781971],[0.478691036,-0.504431697,0.535955559,-0.47870157],[-2,2,-2,11],[107.724661515,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetTarget_80:
=[[-52.11787028,930.079221314,365.631682863],[0.478688749,-0.504431939,0.535956007,-0.478703101],[-2,2,-2,11],[107.724600621,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetTarget_100:
=[[-52.117508312,963.557453268,365.63112507],[0.225519018,-0.653390292,0.682301217,-0.238091052],[-2,1,-2,11],[107.724604507,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetTarget_120:
=[[-52.117822344,930.079536274,365.631276349],[0.228934734,-0.652189395,0.681163284,-0.24135961],[-2,1,-2,11],[107.724647204,9E9,9E9,9E9,9E9,9E9]];
CONSTrobtargetTarget_130:
=[[-52.117822344,930.079536274,365.631276349],[0.228934734,-0.652189395,0.681163284,-0.24135961],[-2,1,-2,11],[107.
 升级会员
升级会员 