逻辑无环流可逆调速系统设计Word下载.docx
《逻辑无环流可逆调速系统设计Word下载.docx》由会员分享,可在线阅读,更多相关《逻辑无环流可逆调速系统设计Word下载.docx(19页珍藏版)》请在冰豆网上搜索。
逻辑无环流可逆调速直流系统主要分为三部分:
主电路和稳压电源,驱动电路,逻辑无环流控制器。
系统原理图如图1.1。
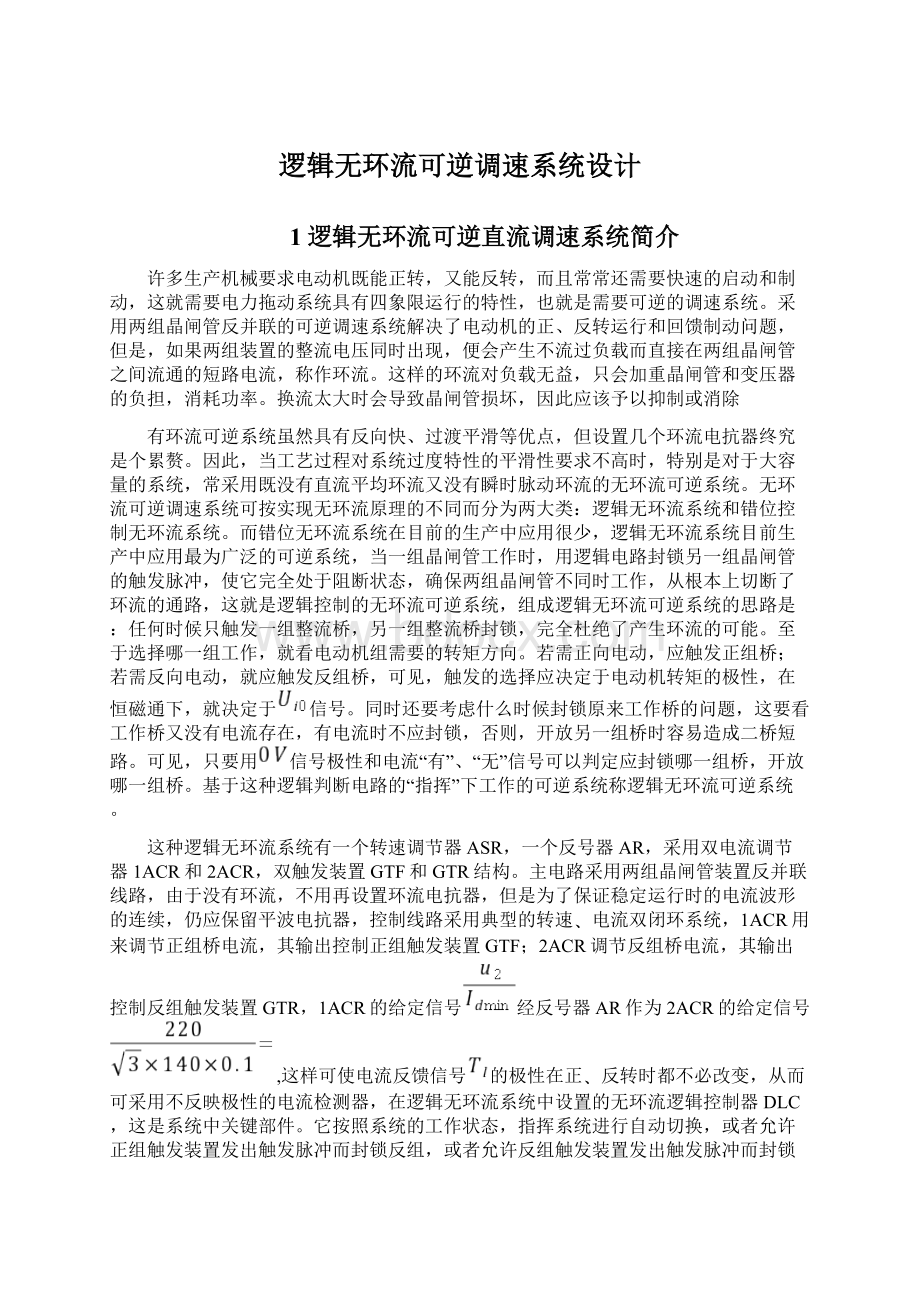
图1.1逻辑无环流可逆调速系统原理图
ASR——速度调节器
ACR1﹑ACR2——正﹑反组电流调节器
GTF、GTR——正反组整流装置
VF、VR——正反组整流桥
DLC——无环流逻辑控制器
HX——推装置
TA——交流互感器
TG——测速发电机
M——工作台电动机
LB——电流变换器
AR——反号器
GL——过流保护环节
2逻辑无环流直流调速系统参数和缓解特性的测定
2.1电枢回路电阻R的测定
电枢回路的总电阻R包括电机的电枢电阻Ra,平波电抗器的直流电阻RL和整流装置的阻Rn,即R=Ra+RL+Rn
为测出晶闸管整流装置的电源阻,可采用福安比较法来测定电阻。
将变压器RP(可采用两只900Ω电阻并联)接入被测系统的主电路,并调节电阻负载至最大。
测试时电动机不加励磁,并使电机堵转。
MCL-31的给定电位器RP1逆时针调到底,使Uct=0。
调节偏移电压电位器RP2,使α=150°
。
合上主电路电源开关。
调节Ug使整流装置输出电压Ud=110V,然后调整RP使电枢电流为0.88A,读取电流表A和电压表V的数值为,,则此时整流装置的理想空载电压为
调节RP,使电流表A的读数为0.44A。
在Ud不变的条件下读取A,V表数值,则
求解两式,可得电枢回路总电阻
如把电机的电枢两端短接,重复上述实验,可得
则电机的电枢电阻为
同样,短接电抗器两端,也可测得电抗器之久电阻RL。
测试结果:
当示波器显示如图2.1时,开始测定参数。
图2.1
表2.1电枢回路总电阻测试
79
62
0.44
0.88
据公式得,
表2.2平波电抗器的直流电阻RL与整流装置的阻Rn之和测试
82
91
表2.3整流装置的阻Rn与电枢电阻Ra之和测试
71
85
所以可得:
电枢回路总电阻R≈38.64Ω
整流装置的阻Rn≈13.63Ω
电枢电阻Ra≈18.19Ω
平波电抗器的直流电阻RL≈6.82Ω
2.2主电路电磁时间常数的测定
采用电流波形法测定电枢回路电磁时间常数Td,电枢回路突加给定电压时,电流id按指数规律上升
其电流变化曲线如图2.1所示。
当t=Td时,有
电机不加励磁。
调节Uct,监视电流表的读数,使电机电枢电流为(50~90)Inom。
然后保持Uct不变,突然合上主电路开关,用示波器拍摄id=f(t)的波形,由波形图上测量出当电流上升至63.2稳定值时的时间,即为电枢回路的电磁时间常数Td。
图2.2电流变化曲线
测定结果如图2.3
图2.3主电路电磁时间常数的测定
由图2.3可知,电磁时间常数
三相桥式整流电路L=0.693=0.693796.74mH取L=0.80H
===0.02s
2.3电动机电势常数和转矩常数的测定
将电动机加额定励磁,使之空载运行,改变电枢电压Ud,测得相应的n,即可由下式算出Ce
Ce的单位为V/(r/min)
转矩常数(额定磁通时)CM的单位为N.m/A,可由Ce求出
由实验测得两组数据
表2.4电动机电势常数的测定
Ud/V
177
147
n/(rad/s)
1200
1000
由公式得,
2.4系统机电时间常数Tm的测定
系统的机电时间常数可由下式计算
由于Tm>
>
Td,也可以近似地把系统看成是一阶惯性环节,即
当电枢突加给定电压时,转速n将按指数规律上升,当n到达63.2稳态值时,所经过的时间即为拖动系统的机电时间常数。
测试时电枢回路中附加电阻应全部切除。
MCL—31的给定电位器RP1逆时针调到底,使Uct=0。
电动机M加额定励磁。
调节Uct,将电机空载起动至稳定转速1000r/min。
然后保持Uct不变,断开主电路开关,待电机完全停止后,突然合上主电路开关,给电枢加电压,用示波器拍摄过渡过程曲线,即可由此确定机电时间常数。
实测曲线如图2.4所示:
由实验测得:
Tm=37ms
图2.4系统机电时间常数Tm的测定
2.5测速发电机特性的测定
电动机加额定励磁,逐渐增加触发电路的控制电压Uct,分别读取对应的UTG,的数值若干组,即可描绘出特性曲线UTG=f(n)。
晶闸管整流装置放大倍数。
实验结果如表2.5
表2.5测速发电机特性的测定
n(r/min)
1100
1300
1400
Uct(V)
6.89
7.63
8.30
8.99
9.68
UCT(V)
1.07
1.20
1.36
1.55
1.76
Ud(V)
152.50
166.51
180.28
194.83
209.34
分析可知取Ks≈20
3驱动电路的设计
由晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,由第二章测的,基本数据如下:
直流电动机:
220V,185W,1.1A,1600r/min;
晶闸管装置放大系数:
Ks≈20
电枢回路总电阻:
R=24.35Ω;
时间常数:
Td=21ms,Tm=49ms;
电流反馈系数:
转速反馈系数:
设计要求:
设计电流调节器,要求电流超调量;
设计转速调节器,要求转速超调量
3.1电流调节器的设计
3.1.1电流调节器的原理图
如图3.1
图3.1电流调节器原理图
3.1.2电流调节器的参数计算
1.确定时间常数
1)整流装置滞后常数Ts。
三相桥式电路的平均失控时间Ts=0.0017s。
2)电流滤波时间常数Toi。
三相桥式电路每个波头时间是3.3ms,为了基本滤平波头,应有(1~2)Toi=3.33ms,因此取Toi=2ms=0.002s。
3)电流环小时间常数之和。
按小时间常数近似处理,取
2选择电流调节器结构
根据设计要求,并保证稳态电流无差,可按典型Ⅰ型系统设计电流调节器。
电流环控制对象是双惯性的,因此可用型电流调节器,其传递函数为:
检查对电流电压的抗扰性能:
,参照附录表1的典型Ⅰ型系统动态抗扰性能,各项指标都是可以接受的。
3.计算电流调节器参数
电流调节器超前时间常数:
电流环开环增益:
要求时,按照附录表2,应取,因此
于是,ACR的比例系数为
4.校验近似条件
电流环截止频率:
⑴晶闸管整流装置传递函数的近似条件
满足近似条件。
⑵忽略反电动势变化对电流环动态影像的条件
⑶电流环小时间常数近似处理条件
5计算调节器电阻和电容
如图3.2,按所用运算放大器取,各电阻和电容值为
图3.2PI型电流调节器
,取
取
按照上述参数,电流环可以达到的动态跟随性能指标为,满足设计要求。
3.2速度调节器的设计
3.2.1速度调节器的原理图
原理图如图3.3
图3.3电流调节器原理图
3.2.2速度调节器的参数计算
1)电流环等效时间常数:
有前面的计算可得
2)转速滤波时间常数:
有条件可知s
3)转速环时间常数:
s
2.选择转速调节器结构
按照设计要求,选用PI调节器,其传递函数表达式为
3.计算转速调节器参数
按跟随和抗扰性能都比较好的原则,取,则ASR的超前时间常数为
转速开环增益
ASR的比例系数
4.检验近似条件
由公式可得转速环截止频率为
(1)电流环传递函数简化条件为
(2)转速环小时间常数近似处理条件为
均满足近似要求。
5.计算调节器电阻和电容
根据图3.4,取=40K
图3.4PI转速调节器
,,
.取
6.校核转速超调量
当时,由附录表3得,,不能满足设计的要求。
实际上,由于表3是按线性系统计算的,而突加阶跃给定时,ASR饱和,不符合线性系统的前提,应该按ASR退饱和的情况计算超调量。
下面对转速调节器退饱和时转速超调量的计算:
设理想空载启动时,
,带入
可得,可以满足设计要求。
3.3触发电路的设计
3.3.1系统对触发器的要求
1)为保证较宽的调速围和可逆运行,要求触发脉冲能够在180°
围移向。
2)对于三相全控桥式整流电路,为了保证可控硅可靠换流,要求触发脉冲宽度大于60°
,或者用双窄脉冲。
3)对可逆系统,为了防止逆变颠
 升级会员
升级会员 