串级控制系统Word文档格式.docx
《串级控制系统Word文档格式.docx》由会员分享,可在线阅读,更多相关《串级控制系统Word文档格式.docx(7页珍藏版)》请在冰豆网上搜索。
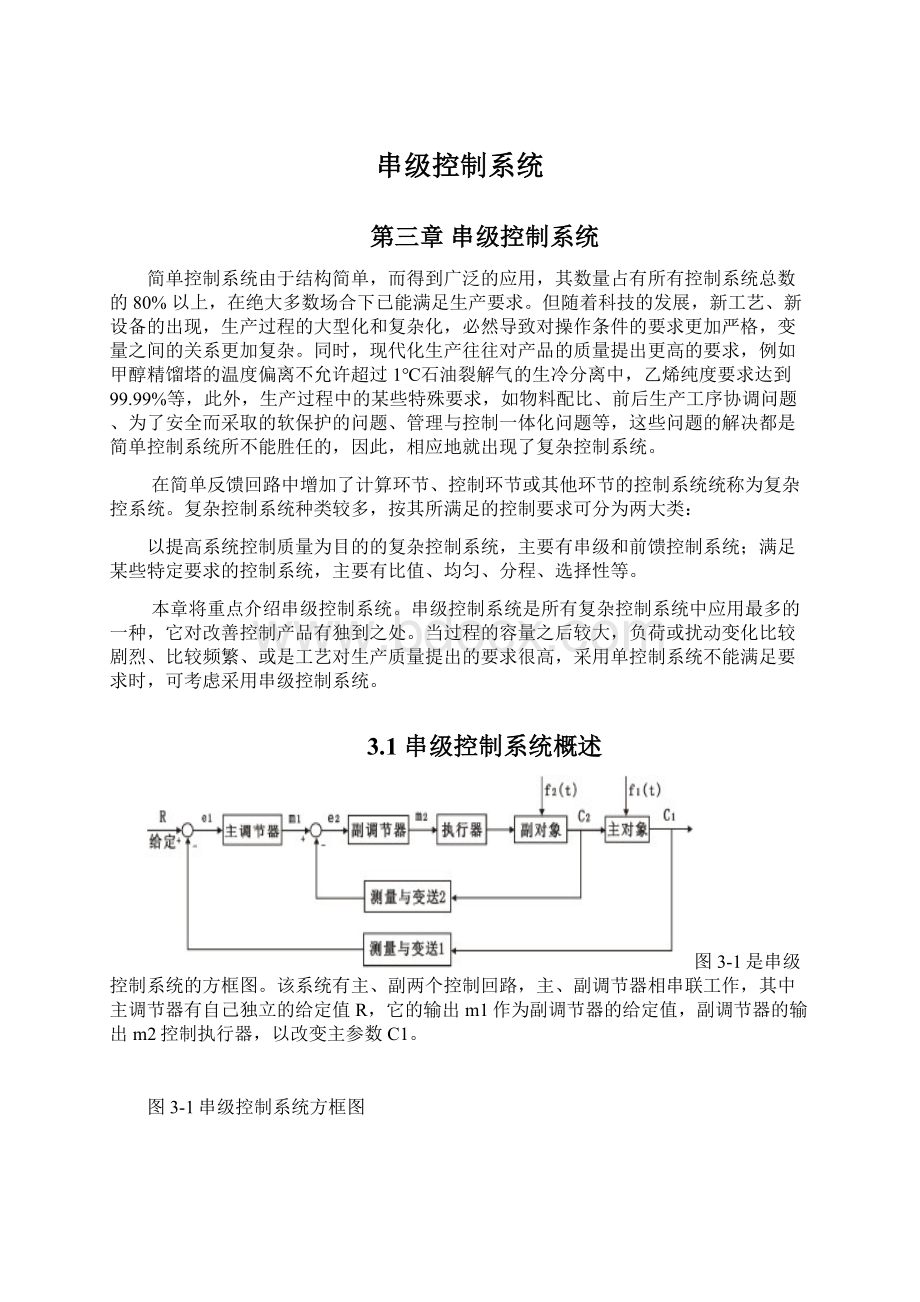
图3-1是串级控制系统的方框图。
该系统有主、副两个控制回路,主、副调节器相串联工作,其中主调节器有自己独立的给定值R,它的输出m1作为副调节器的给定值,副调节器的输出m2控制执行器,以改变主参数C1。
图3-1串级控制系统方框图
3.2串级控制系统的特点
串级控制系统从总体来看,仍然是一个定制控制系统,因此主变量在扰动作用下的过渡过程和简单定制控制系统的过渡过程具有相同的品质指标和类似的形式。
但是串级控制系统和简单控制系统相比,在结构上增加了一个与之相连的副回路,因此具有一系列特点。
由于副回路的存在,改善了过程的动态特性提高了系统的工作频率。
串级控制系统在结构上区别于接单控制系统的主要标志是用一个闭合的副回路代替了原来的一部分被控对象。
所以,也可以把整个副回路看作是主回路的一个环节,或把副回路称为等效副对象。
由于副过程在一般情况下可以用一阶滞后环节来表示,如果副控制器采用比例作用,那么串级控制系统由于副回路的存在,改善了过程的动态特性,是。
而等效副对象的时间常数减小,意味着对象的容量滞后减小,这会使系统的反应速度增加,控制更为及时。
另一方面,由于等效副对象的时间常数减小,系统的工作频率可获得提高。
当主副对象都是一阶惯性环节,主副控制器均采用纯比例作用是,与简单控制系统相比,在相同衰减比的条件下,串级系统的工作频率要高于简单控制系统。
所以,串级控制系统由于副回路的存在,改善了被控对象的动态特性,是控制过程加快,从而有效地克服容量滞后、使整个系统的工作频率有所提高,进一步提高了控制质量,其主要优点表现在:
1 能及时克服进入副回路的扰动影响,提高了系统抗扰动能力
与同等条件下的简单控制系统相比较,串级控制系统由于副回路的存在,能迅速克服进入副回路扰动的影响,从而大大提高了抗二次扰动的能力,抗一次扰动的能力也有所提高。
这是因为当扰动进入副回路后,在他还未影响到主变量之前,首先由副变量检测到扰动的影响,并通过副回路的定值控制作用,及时调节操纵变量,师傅变量回复到设定值,从而是扰动对主主变量的影响减少。
即副回路对扰动进行粗调,主回路对扰动进行细调。
由于对进入副回路的扰动有两级控制措施,即使扰动作用影响主环,也比单回路的控制及时,因此,串级控制系统能迅速克服副回路的影响。
2 具有一定的自适应能力。
在简单控制系统中,控制器的参数是在一定的负荷、一定的操作条件下,根据该负荷的对象特性,按一定的质量指标整定得到的。
因此,一组控制器参数只能适应于一定的生产负荷和操作条件。
如果被控对象具有非线性,那么,随着负荷和操作条件的改变,对象特性就会发生改变。
这样,在原负荷下整定所得的控制器参数就不在能够适应,需要重新整定。
如果仍用原先的参数,控制质量就会下降。
这一问题在简单控制系统中是很难解决的。
但是,在串级控制系统中,主回路虽然是一个定值控制系统,而副回路对主控器来说却是一个随动系统,他的设定值是随着主控制器的输出而变化的。
这样,当负荷或操作条件发生变化时,主控制器就可以按照负荷或操作条件的变化情况而及时调整副控制器的设定值,使系统运行在新的工作点上,从而保证在新的负荷和操作条件下,控制系统仍然具有较好的控制质量。
从这一意义上来讲,串级控制系统有一定的自适应能力。
综上所述,串级控制系统由于副回路的存在,对于进入其中的扰动有较强的克服能力,而且由于副回路的存在改善了过程的动态特性,提高了系统的工作频率,所以控制质量比较高。
此外,副回路的快速随动特性使串级控制系统具有一定的自适应能力。
因此,对于控制质量要求高,扰动大、滞后时间长的过程,当采用简单控制系统达不到质量要求时,采用串级控制方案往往可以获得较为满意的结果。
不过串级控制系统比单回路控制系统所需要的线路仪表多,系统的投运和整定相应地也较为复杂一些。
所以,如果单回路控制系统能够解决的问题,就尽量不要采用串级控制方案。
3.3主、副调节器控制规律的选择
在串级控制系统中,主、副调节器所起的作用是不同的。
主调节器起定值控制作用,它的控制任务是使主参数等于给定值(无余差),故一般宜采用PI或PID调节器。
由于副回路是一个随动系统,它的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P或PI调节器。
3.4PID控制器
工业生产过程中,对于生产装置的温度、压力、流量、液位等工艺变量常常要求维持在一定的数值上,或按一定的规律变化,以满足生产工艺的要求。
PID控制器是根据PID控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值与工艺要求的预定值一致。
不同的控制规律适用于不同的生产过程,必须合理选择相应的控制规律,否则PID控制器将达不到预期的控制效果。
3.4.1PID控制器理论
PID控制器(比例-积分-微分控制器),由比例单元P、积分单元I和微分单元D组成。
通过Kp,Ki和Kd三个参数的设定。
PID控制器主要适用于基本线性和动态特性不随时间变化的系统。
PID控制器是一个在工业控制应用中常见的反馈回路部件。
这个控制器把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,这个新的输入值的目的是可以让系统的数据达到或者保持在参考值。
和其他简单的控制运算不同,PID控制器可以根据历史数据和差别的出现率来调整输入值,这样可以使系统更加准确,更加稳定。
可以通过数学的方法证明,在其他控制方法导致系统有稳定误差或过程反复的情况下,一个PID反馈回路却可以保持系统的稳定。
一个控制回路包括三个部分:
系统的传感器得到的测量结果控制器作出决定通过一个输出设备来作出反应控制器从传感器得到测量结果,然后用需求结果减去测量结果来得到误差。
然后用误差来计算出一个对系统的纠正值来作为输入结果,这样系统就可以从它的输出结果中消除误差。
在一个PID回路中,这个纠正值有三种算法,消除目前的误差,平均过去的误差,和透过误差的改变来预测将来的误差。
比如说,假如一个水箱在为一个植物提供水,这个水箱的水需要保持在一定的高度。
一个传感器就会用来检查水箱里水的高度,这样就得到了测量结果。
控制器会有一个固定的用户输入值来表示水箱需要的水面高度,假设这个值是保持65%的水量。
控制器的输出设备会连在一个马达控制的水阀门上。
打开阀门就会给水箱注水,关上阀门就会让水箱里的水量下降。
这个阀门的控制信号就是我们控制的变量,它也是这个系统的输入来保持这个水箱水量的固定。
PID控制器可以用来控制任何可以被测量的并且可以被控制变量。
比如,它可以用来控制温度,压强,流量,化学成分,速度等等。
汽车上的巡航定速功能就是一个例子。
一些控制系统把数个PID控制器串联起来,或是链成网络。
这样的话,一个主控制器可能会为其他控制输出结果。
一个常见的例子是马达的控制。
我们会常常需要马达有一个控制的速度并且停在一个确定的位置。
这样呢,一个子控制器来管理速度,但是这个子控制器的速度是由控制马达位置的主控制器来管理的。
连合和串联控制在化学过程控制系统中是很常见的。
3.4.2PID控制规律的选择
尽管不同类型的控制器,其结构、原理各不相同,但是基本控制规律只有三个:
比例(P)控制、积分(I)控制和微分(D)控制。
这几种控制规律可以单独使用,但是更多场合是组合使用。
如比例(P)控制、比例-积分(PI)控制、比例-积分-微分(PID)控制等。
1)比例(P)控制
单独的比例控制也称“有差控制”,输出的变化与输入控制器的偏差成比例关系,偏差越大输出越大。
(3-1)
—调节器的输出变化量
—调节器的比例增益,即放大系数
e—调节器的输入,即偏差
实际应用中,比例度的大小应视具体情况而定,比例度太大,控制作用太弱,不利于系统克服扰动,余差大,控制质量差;
比例度太小,控制作用强,容易导致系统的稳定性变差,引发振荡。
对于反应灵敏、放大能力强的被控对象,为提高系统的稳定性,应当使比例度稍大些;
而对于反应迟钝,放大能力又较弱的被控对象,比例度可选小一些,以提高整个系统的灵敏度,也可以相应减小余差。
单纯的比例控制适用于扰动不大,滞后较小,负荷变化小,要求不高,允许有一定余差存在的场合。
工业生产中比例控制规律使用较为普遍。
2)比例积分(PI)控制
比例控制规律是基本控制规律中最基本的、应用最普遍的一种,其优点就是控制及时、迅速。
只要有偏差产生,控制器立即产生控制作用。
但是,不能最终消除余差的缺点限制了它的单独使用。
然而当比例控制的基础上加上积分控制作用则能克服余差。
(3-2)
—调节器的比例增益,即放大系数
e—调节器的输入,即偏差
—积分时间
积分控制器的输出与输入偏差对时间的积分成正比。
积分控制器的输出不仅与输入偏差的大小有关,而且还与偏差存在的时间有关。
只要偏差存在,输出就会不断累积(输出值越来越大或越来越小),一直到偏差为零,累积才会停止。
所以,积分控制可以消除余差。
积分控制规律又称无差控制规律。
积分时间的大小表征了积分控制作用的强弱。
积分时间越小,控制作用越强;
反之,控制作用越弱。
积分控制虽然能消除余差,但它存在着控制不及时的缺点。
因为积分输出的累积是渐进的,其产生的控制作用总是落后于偏差的变化,不能及时有效地克服干扰的影响,难以使控制系统稳定下来。
所以,实用中一般不单独使用积分控制,而是和比例控制作用结合起来,构成比例积分控制。
这样取二者之长,互相弥补,既有比例控制作用的迅速及时,又有积分控制作用消除余差的能力。
因此,比例积分控制可以实现较为理想的过程控制。
比例积分控制器是目前应用最为广泛的一种控制器,多用于工业生产中液位、压力、流量等控制系统。
由于引入积分作用能消除余差,弥补了纯比例控制的缺陷,获得较好的控制质量。
但是积分作用的引入,会使系统稳定性变差。
对于有较大惯性滞后的控制系统,要尽量避免使用。
3)比例微分(PD)控制
比例积分控制对于时间滞后的被控对象使用不够理想。
为此人们设想,能否根据偏差的变化趋势来做出相应的控制动作呢?
犹如有经验的操作人员,即可根据偏差的大小来改变阀门的开度(比例作用),又可根据偏差变化的速度大小来预计将要出现的情况,提前进行过量控制,“防患于未然”。
这就是具有“超前”控制作用的微分控制规律。
(3-3)
—微分时间
微分控制器输出的大小取决于输入偏差变化的速度。
 升级会员
升级会员 