机械原理课程设计 牛头刨床凸轮机构Word格式.docx
《机械原理课程设计 牛头刨床凸轮机构Word格式.docx》由会员分享,可在线阅读,更多相关《机械原理课程设计 牛头刨床凸轮机构Word格式.docx(17页珍藏版)》请在冰豆网上搜索。
135
42
75
10
70
五、要求:
1)计算从动件位移、速度、加速度并绘制线图。
2)确定凸轮机构的基本尺寸,选取滚子半径,画出凸轮实际廓线,并按比例绘出机构运动简图。
以上容作在A2或A3图纸上。
3)编写出计算说明书。
指导教师:
开始日期:
2011年6月26日完成日期:
2011年7月1日
1.设计任务及要求------------------------------
2.数学模型的建立------------------------------
3.程序框图---------------------------------------
4.程序清单及运行结果------------------------
5.设计总结---------------------------------------
6.参考文献--------------------------------------
1设计任务与要求
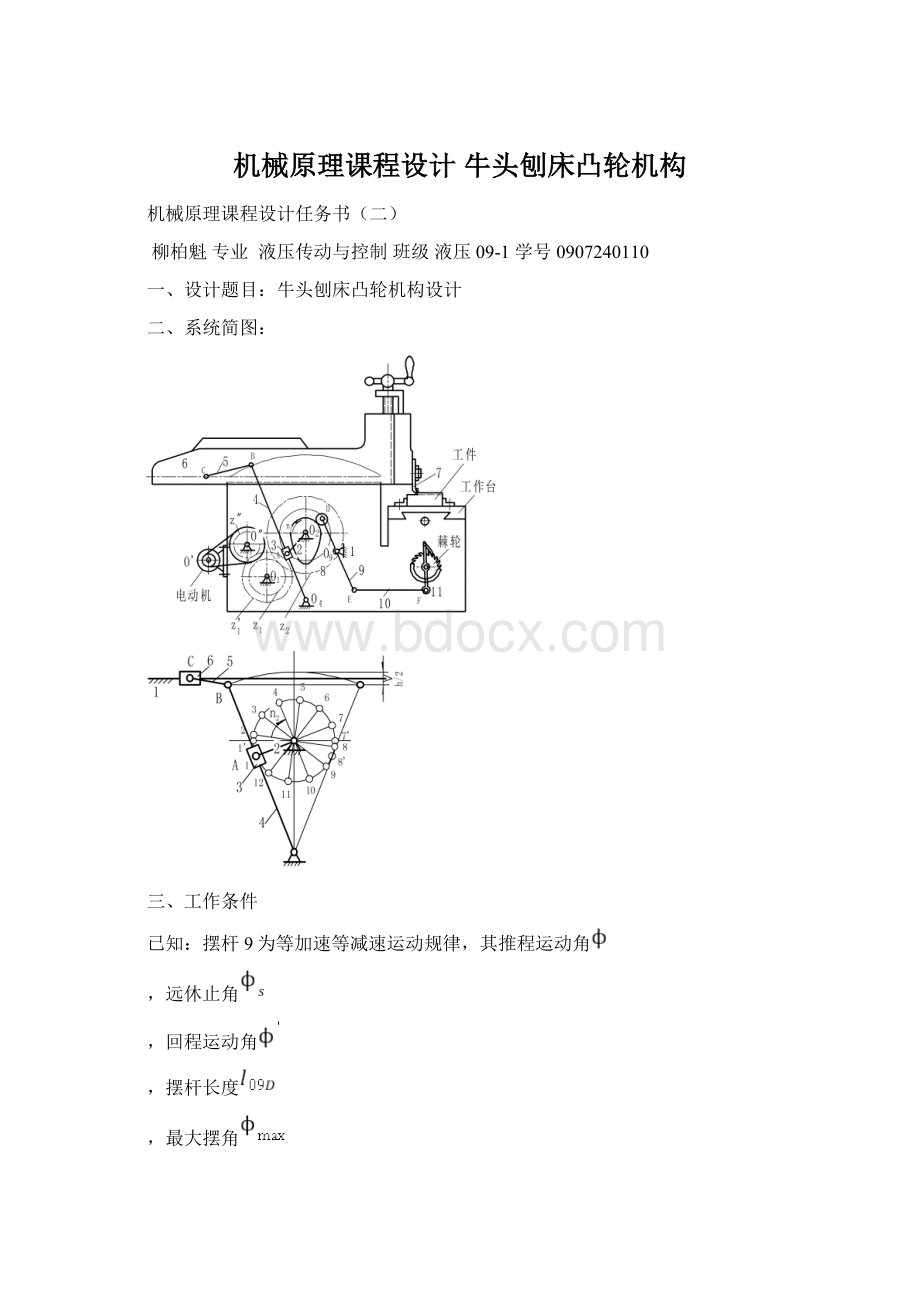
已知摆杆9为等加速等减速运动规律,其推程运动角φ=75,远休止角φs=10,回程运动角φ΄=70,摆杆长度l09D=135,最大摆角φmax=15,许用压力角[α]=42,凸轮与曲线共轴。
要求:
(1)计算从动件位移、速度、加速度并绘制线图(用方格纸绘制),也可做动态显示。
(2)确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线,并按比例绘出机构运动简图。
(3)编写计算说明书。
2数学模型
(1)推程等加速区
当
时
(角位移)
(角速度)
(角加速度)
(2)推程等减速区
(角速度)
(3)远休止区
(角速度)
(4)回程等加速区
(角位移)
(5)回程等减速区
(6)近休止区
一、
如图选取xOy坐标系,B1点为凸轮轮廓线起始点。
开始时推杆轮子中心处于B1点处,当凸轮转过角度时,摆动推杆角位移为,由反转法作图可看出,此时滚子中心应处于B点,其直角坐标为:
因为实际轮廓线与理论轮廓线为等距离,即法向距离处处相等,都为滚半径
rT.故将理论廓线上的点沿其法向向测移动距离rT即得实际廓线上的点B(x1,y1).由高等数学知,理论廓线B点处法线nn的斜率应为
根据上式有:
可得
实际轮廓线上对应的点B(x,y)的坐标为
此即为凸轮工作的实际廓线方程,式中“-”用于等距线,“+”
于外等距线。
3程序框图
程序清单及运行结果
4程序清单及运行结果
#include<
math.h>
dos.h>
graphics.h>
conio.h>
stdio.h>
#definel135.0
#defineAa42
#definer_b40
#definerr8
#defineK(3.1415926/180)
#definedt0.25
floatQ_max,Q_t,Q_s,Q_h;
floatQ_a;
doubleL,pr;
floate[1500],f[1500],g[1500];
voidCal(floatQ,doubleQ_Q[3])
{
Q_max=15,Q_t=75,Q_s=10,Q_h=70;
if(Q>
=0&
&
Q<
=Q_t/2)
Q_Q[0]=K*(2*Q_max*Q*Q/(Q_t*Q_t));
Q_Q[1]=4*Q_max*Q/(Q_t*Q_t);
Q_Q[2]=4*Q_max/(Q_t*Q_t);
}
Q_t/2&
=Q_t)
Q_Q[0]=K*(Q_max-2*Q_max*(Q-Q_t)*(Q-Q_t)/(Q_t*Q_t));
Q_Q[1]=4*Q_max*(Q_t-Q)/(Q_t*Q_t);
Q_Q[2]=-4*Q_max/(Q_t*Q_t);
Q_t&
=Q_t+Q_s)
Q_Q[0]=K*Q_max;
Q_Q[1]=0;
Q_Q[2]=0;
Q_t+Q_s&
=Q_t+Q_s+Q_h/2)
Q_Q[0]=K*(Q_max-2*Q_max*(Q-Q_t-Q_s)*(Q-Q_t-Q_s)/(Q_h*Q_h));
Q_Q[1]=-4*Q_max*(Q-Q_t-Q_s)/(Q_h*Q_h);
Q_Q[2]=-4*Q_max/(Q_h*Q_h);
Q_t+Q_s+Q_h/2&
=Q_t+Q_s+Q_h)
Q_Q[0]=K*(2*Q_max*(Q_h-Q+Q_t+Q_s)*(Q_h-Q+Q_t+Q_s)/(Q_h*Q_h));
Q_Q[1]=-4*Q_max*(Q_h-Q+Q_t+Q_s)/(Q_h*Q_h);
Q_Q[2]=4*Q_max/(Q_h*Q_h);
Q_t+Q_s+Q_h&
=360)
Q_Q[0]=K*0;
voidDraw(floatQ_m)
{
floattt,x,y,x1,y1,x2,y2,x3,y3,x4,y4,dx,dy;
doubleQQ[3];
circle(240,240,3);
circle(240+L*sin(50*K)+4*cos(240*K),240+L*cos(50*K)-4*sin(240*K),3);
moveto(240,240);
lineto(240+20*cos(240*K),240-20*sin(240*K));
lineto(260+20*cos(240*K),240-20*sin(240*K));
lineto(240,240);
moveto(240+L*sin(50*K)+4*cos(240*K),240+L*cos(50*K)-4*sin(240*K));
lineto(240+L*sin(50*K)+20*cos(240*K),240+L*cos(50*K)-20*sin(240*K));
lineto(255+L*sin(50*K)+20*cos(240*K),240+L*cos(50*K)-20*sin(240*K));
lineto(240+L*sin(50*K)+4*cos(240*K),240+L*cos(50*K)-4*sin(240*K));
for(tt=0;
tt<
=720;
tt=tt+2)
Cal(tt,QQ);
x1=L*cos(tt*K)-l*cos(Q_a+QQ[0]-tt*K);
y1=l*sin(Q_a+QQ[0]-tt*K)+L*sin(tt*K);
x2=x1*cos(Q_m*K+40*K)+y1*sin(Q_m*K+40*K);
y2=-x1*sin(Q_m*K+40*K)+y1*cos(Q_m*K+40*K);
putpixel(x2+240,240-y2,2);
dx=(QQ[1]-1)*l*sin(Q_a+QQ[0]-tt*K)-L*sin(tt*K);
dy=(QQ[1]-1)*l*cos(Q_a+QQ[0]-tt*K)+L*cos(tt*K);
x3=x1-rr*dy/sqrt(dx*dx+dy*dy);
y3=y1+rr*dx/sqrt(dx*dx+dy*dy);
x4=x3*cos(Q_m*K+40*K)+y3*sin(Q_m*K+40*K);
y4=-x3*sin(Q_m*K+40*K)+y3*cos(Q_m*K+40*K);
putpixel(x4+240,240-y4,YELLOW);
voidCurvel()
intt;
floaty1,y2,y3,a=0;
for(t=0;
t<
=360/dt;
t++)
delay(300);
a=t*dt;
if((a>
=0)&
(a<
=Q_t/2))
{
y1=(2*Q_max*pow(a,2)/pow(Q_t,2))*10;
y2=(4*Q_max*(dt*K)*a/pow(Q_t,2))*pow(10,4.8);
y3=(4*Q_max*pow((dt*K),2)/pow(Q_t,2))*pow(10,8.5);
putpixel(100+a,300-y1,1);
putpixel(100+a,300-y2,2);
putpixel(100+a,300-y3,4);
line(100+Q_t/2,300-y3,100+Q_t/2,300);
if((a>
Q_t/2)&
=Q_t))
y1=(Q_max-2*Q_max*pow((Q_t-a),2)/pow(Q_t,2))*10;
y2=(4*Q_max*(dt*K)*(Q_t-a)/pow(Q_t,2))*pow(10,4.8);
y3=((-4)*Q_max*pow((dt*K),2)/pow(Q_t,2))*pow(10,8.5);
putpixel(100+a,300-y1,1);
putpixel(100+a,300-y2,2);
putpixel(100+a,300-y3,4);
line(100+Q_t,300-y3,100+Q_t,300);
line(100+Q_t/2,300,100+Q_t/2,300-y3);
Q_t)&
=Q_t+Q_s))
y1=Q_max*10;
y2=0;
y3=0;
line((100+Q_t+Q_s),300,(100+Q_t+Q_s),300-y3);
Q_t+Q_s)&
=Q_t+Q_s+Q_h/2))
y1=(Q_max-2*Q_max*pow((a-Q_t-Q_s),2)/pow(Q_h,2))*10;
y2=((-4)*Q_max*(dt*K)*(a-Q_t-Q_s)/pow(Q_h,2))*pow(10,4.8);
y3=((-4)*Q_max*pow((dt*K),2)/pow(Q_h,2))*pow(10,8.5);
line((100+Q_t+Q_s+Q_h/2),300,(100+Q
 升级会员
升级会员 