《自动控制原理》课后习题问题详解Word文档格式.docx
《《自动控制原理》课后习题问题详解Word文档格式.docx》由会员分享,可在线阅读,更多相关《《自动控制原理》课后习题问题详解Word文档格式.docx(22页珍藏版)》请在冰豆网上搜索。
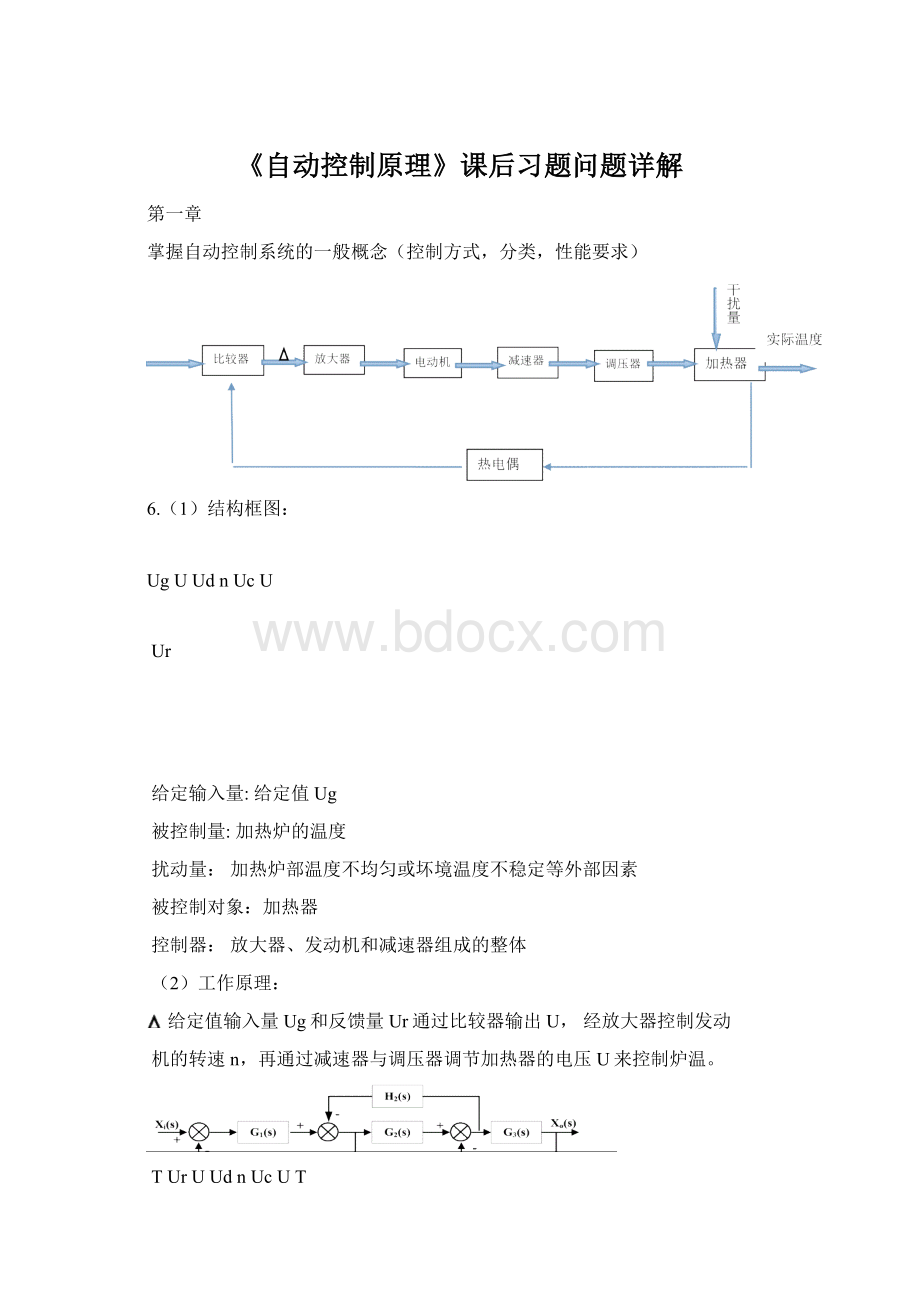
机的转速n,再通过减速器与调压器调节加热器的电压U来控制炉温。
TUrUUdnUcUT
7.
(1)结构框图
略
给定输入量:
输入轴θr
被控制量:
输出轴θc
齿轮间配合、负载大小等外部因素
齿轮机构
控制器:
液压马达
θcUeUgiθmθc
第二章
掌握系统微分方程,传递函数(定义、常用拉氏变换),系统框图化简;
1.(a)
将
(2)式带入
(1)式得:
拉氏变换可得
整理得
1.(b)
将
(2)式代入
(1)式得
拉氏变换得
2.
1)微分方程求解法
中间变量为,及其一阶导数,直接化简比较复杂,可对各微分方程先做拉氏变换
移项得
可得
2)复阻抗法
解得:
3.
分别以m2,m1为研究对象(不考虑重力作用)
中间变量含一阶、二阶导数很难直接化简,故分别做拉氏变换
消除Y1中间变量
10.
系统框图化简:
11.
第三章
掌握时域性能指标,劳斯判据,掌握常用拉氏变换-反变换求解时域响应,误差等
2.
(1)求系统的单位脉冲响应
2.
(2)求系统的单位阶跃响应,和单位斜坡响应
9.
解:
由图可知该系统的闭环传递函数为
又因为:
联立1、2、3、4得
所以
由题可知系统闭环传递函数为
当k=10时,=10rad/s;
=0.5;
所以有
当k=20时,=14.14rad/s;
=0.35;
当0<
k<
=2.5时,为过阻尼和临界阻尼,系统无超调,和峰值时间;
其中调整时间不随k值增大而变化;
当k>
2.5时,系统为欠阻尼,超调量%随着K增大而增大,和峰值时间随着K增大而减小;
14.
(1)
解,由题可知系统的闭环传递函数为
14.
(2)
20.
由题可知系统的开环传递函数为
当输入为单位阶跃信号时,系统误差的拉氏变换为
25.
当输入为给定单位阶跃信号时,系统在给定信号下误差的拉氏变换为
当输入为扰动信号时,系统扰动信号下误差的拉氏变换为
第四章根轨迹法
掌握轨迹的概念、绘制方法,以及分析控制系统
4-2
(2)G(s)=;
分析题意知:
由s(0.2s+1)(0.5s+1)=0得开环极点s1=0,s2=-2,s3=-5。
(1)根轨迹的分支数等于3。
(2)三条根轨迹的起点分别是实轴上的(0,j0),(-2,j0),(-5,j0),终止点都是无穷远处。
(3)根轨迹在实轴上的轨迹段:
[-2,0]段和[-∞,-5]段。
(4)根轨迹的渐近线:
由n=3,m=0
渐近线与实轴的交点
(5)根轨迹与实轴的分离点:
A(s)=s(0.2s+1)(0.5s+1)B(s)=1
由解得:
s1=s2=(舍去)
根轨迹如图所示
σ
jw
(3)G(s)=
由s(s+2)(s+3)=0得开环极点s1=0,s2=-2,s3=-3。
由k(s+2)=0得开环零点为s=-2。
(2)三条根轨迹的起点分别是实轴上的(0,j0),(-2,j0),(-5,j0),终止是(-2,j0)和无穷远处。
[-3,0]段。
由n=3,m=1
A(s)=s(s+2)(s+3)B(s)=k(s+2)
s1=s2=-2(舍去)s3=
其中s1=s2=-2s是因为闭环特征方程的根恒有一根s=-2
分离点取s=根轨迹如图所示
4-3G(s)H(s)=;
由s2(s+2)(s+5)=0得开环极点s1=s2=0,s3=-2,s4=-5。
(1)根轨迹的分支数等于4。
[-5,-2]段。
由n=4m=0
A(s)=s2(s+2)(s+5)B(s)=1
s1=s2=-4s3=(舍去)
4-4
由s(0.1s+1)(s+1)=0得开环极点s1=0,s2=-1,s3=-10。
(2)三条根轨迹的起点分别是实轴上的(0,j0),(-1,j0),(-10,j0),终止点都是无穷远处。
[-1,0]段和[-∞,-10]段。
A(s)=s(0.1s+1)(s+1)B(s)=1
s1=0.49s2(舍去)
闭环特征方程:
s(0.1s+1)(s+1)+K=0将s=jw代入得
10w-w3=0
(1)
-11w2+10K=0
(2)
解得K=11
K>
11时系统不稳定
4-6G(s)=;
由s(s+3)(s+7)=0得开环极点s1=0,s2=-3,s3=-7。
(2)三条根轨迹的起点分别是实轴上的(0,j0),(-3,j0),(-7,j0),终止点都是无穷远处。
[-3,0]段和[-∞,-7]段。
A(s)=s(s+3)(s+7)B(s)=1
s1=-1.3s2=-5.4(舍去)
s(s+3)(s+7)+k=0将s=jw代入得
21w-w3=0
(1)
k=10w2
(2)
得k=210k210系统稳定
再将s=-1.3代入闭环特征方程得k=12.6
12.6<
k210时系统具有欠阻尼阶跃响应。
第五章频率特性法
掌握频域特性的概念、奈奎斯特图和对数幅频特性特图(伯德图);
掌握最小相位系统求传递函数;
频域实验法确定传递函数;
掌握奈奎斯特判据;
相角裕量,幅值裕量;
频域特性与系统性能关系,及频域性能指标等
5-2
(1)G(s)=;
G(jw)=
∴A(w)=(也对,但乘进去化简的过程容易出错!
)
(建议采用复数乘法运算的原则,幅值相乘,相角相加!
w=0时A(w)=∞
w=∞时A(w)=0
∴开环幅相频特性曲线如图所示:
Re
Im
(注意要标出w从0到无穷变化的方向)
5-3G(s)=
分析题意知
G(jw)=G1(jw)G2(jw)
其中:
G1(jw)=
G2(jw)=转折频率为wt2=
∴开环对数频率特性曲线如图所示:
5-4
;
解分析题意知:
由此求得幅频特性为
将A
(2)=5代入A(w)得K=24
∴
5-5
(a)解分析题意知
∴对数相频特性曲线如图所示:
(b)解分析题意知
5-8
∵v=1∴要补花半圆,补画后图形如图所示
∴N+=1N-=1∵P=1
∴系统不稳定
(b)∴N+=1N-=1∵P=1
(c)
∵P=0而N+=0N-=1/2曲线在-1左侧有穿越∴系统不稳定
(注意:
1/jw由0-到0+的过程中,相角由90变为-90度变化为180度,而根据对称性从0开始相比与0+相角增加90度)
5-11
解分析题意知
画出对应的开环幅相频特性曲线
10
-1
∵N+=0N-=0P=0
∴系统稳定
5-13
将G(jw)化为G(jw)=P(w)+Q(w)j令Q(w)=0得w=
当K=10时Kg=
再令|G(jw)|=1得wc=0.7488
=48.90
当K=100时Kg=
再令|G(jw)|=1得wc=3.0145
=1.60
(注意角度变化,逆时针旋转角度增加,顺时针旋转角度减小!
5-16
∴
 升级会员
升级会员 