大小球分拣传送机械控制系统设计Word文档格式.docx
《大小球分拣传送机械控制系统设计Word文档格式.docx》由会员分享,可在线阅读,更多相关《大小球分拣传送机械控制系统设计Word文档格式.docx(18页珍藏版)》请在冰豆网上搜索。
XXXXX
指导教师:
2012年12月12日
内容摘要
机电一体化产品的积极作用正日益为人们所认识,如本设计产品机械手,它能部分地代替人的劳动并能达到生产工艺的要求,遵循一定的程序、时间和位置来完成工件的筛选与传送。
而且它能大大地改善工人的劳动条件,加快实现工业生产机械化和自动化的步伐。
因此,受到各先进单位的重视并投入了大量的人力物力加以研究和应用,尤其在高温、高压、粉尘、噪声的场合,应用得更为广泛。
在我国,近代几年来也有较快的发展,并取得一定的成果,受到各工业部门的重视。
在生产过程中,经常要对流水线上的产品进行分拣,本课程设计拟设计大小球分拣传送机控制系统的PLC设计,采用的德国西门子S7-200系列(cpu-224)PLC,对机械臂的上下、左右以及抓取运动进行控制,用于分捡大小球的机械装置。
我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。
关键词:
大小球分拣控制系统;
PLC设计;
机械手
1
第1章引言1…………………………………………………………………………………………
1.1大、小球分拣传送机械控制系统设计内容简介1……………………………………1.2大、小球分拣传送机械控制系统设计要求1…………………………………………1.3大、小球分拣传送机械控制系统设计思想2…………………………………………第2章大、小球分拣传送系统的硬件电路设计3………………………………………3………………………………………………大、小球分拣传送系统功能说明2.1
2.2设计主电路原理图3………………………………………………………………………2.3机械臂分拣大、小球控制的运行框图…………………………………………4
2.4确定I/O信号数量,选择PLC的类型…………………………………4
2.5机械臂分拣大、小球控制的电器元件I/O分配表5…………………………………2.6机械臂分拣大、小球控制的I/O接线图5…………………………………………第3章大、小球分拣传送系统的程序设计8…………………………………………3.1机械臂分拣大、小球控制程序的梯形图8……………………………………………3.2机械臂分拣大、小球控制程序的指令表11
……………………………………………第4章软件硬件调试13…………………………………………………………………………结论16……………………………………………………………………………………………………设计总结17………………………………………………………………………………………………谢辞18……………………………………………………………………………………………………参考文献19………………………………………………………………………………………………
第1章引言
1.1大、小球分拣传送机械控制系统设计内容简介
学院此次安排我们进行了为其两周的机电传动课程设计实习,对我们即将进行毕业设计是很有益处的。
这学期我们学习了机电传动控制课程,此次实习主要是对课本中的知识进行实践,比如继电器---接触器控制和可编程控制器控制等重要章节更是联系紧密。
让我们把课本知识很好的应用于实践中去,有助于总体实力的提高。
本次我的课程设计的主要内容:
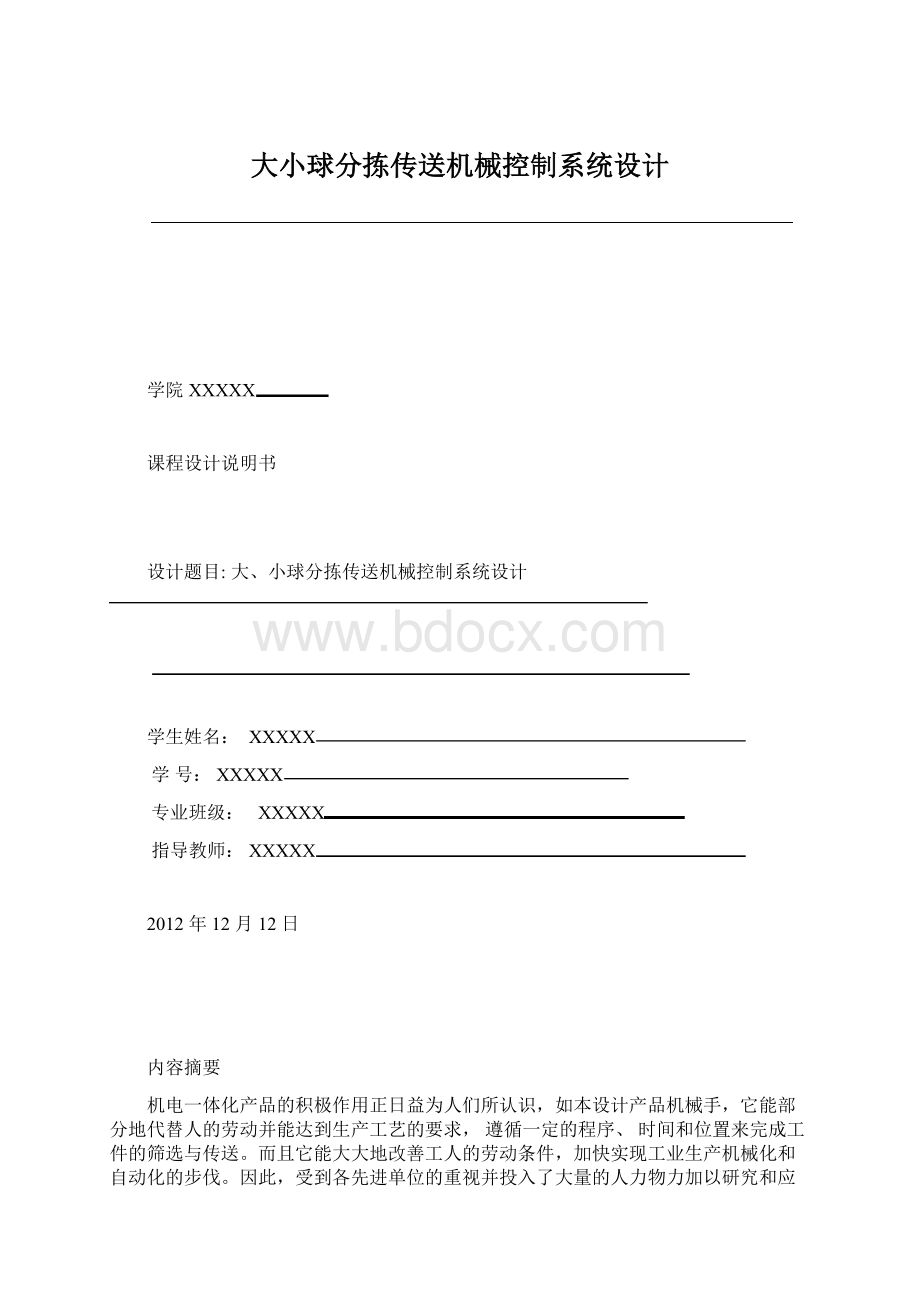
大、小球分拣传送机械控制系统设计,如图1-1。
图1-1大、小球分拣传送机械工作示意图
1.2大、小球分拣传送机械控制系统设计要求
本次设计的控制要求如下:
1.机械臂起始位置在机械原点(见图),为左限、上限并有显示。
2.有启动按钮和停止按钮控制运行,按下设备停止按钮后机械臂必须回到原点。
3.启动后,机械臂动作顺序为:
下降→吸球→上升(至上限)→右行(至右限)→下降→释放→上升(至上限)→左行返回(至原点)。
4.机械臂右行时有小球右限(LS4)和大球右限(LS5)之分;
下降时,当电磁铁压着大球时,下限开关LS2断开(=“0”);
压着小球时,下限开关LS2接通(=“1”)。
1.3大小球分拣传送机械控制系统设计思想
对于本次课程设计的总体思路如下:
本设计主要要求控制电路PLC的设计,故对于主电路就不做过多阐述。
主电路:
1.电动机控制机械臂上下左右运动。
2.主电路给机械臂的电磁铁加电产生磁场吸住球运动。
由继电器控制电动机正反转.
控制电路:
由PLC控制继电器线圈来控制主电路的上下左右运动和抓释小球.PLC控制继电器和电灯的输出,从而控制主电路。
1.当输送机处于起始位置时,上限位开关和左限位开关被压下,原点显示灯亮。
2.启动装置后,机械臂下行,一直到极限开关SQ闭合。
此时,若碰到的是小球,则下限开关LS2为闭合状态;
若碰到的是大球,则下限开关LS2仍为断开状态。
3.吸起小球后(SQ开关闭合),则机械臂向上行,碰到上限位开关后,捡球装置向右行;
碰到右限位开关(小球的右限位开关LS4)后,再下行,下行1秒后机械臂电磁铁失电,将小球释放到小球箱里,然后机械臂返回到原位。
4.如果吸起的是大球,捡球装置右行碰到另一个右限位开关(大球的右限位开关LS5)后,再向下行,碰到下限位开关后,将大球释放到小球箱里,然后返回到原位。
5.当机械臂回原位后,一个工作循环结束,如果此时接近开关PSO显示球槽内还有球,则继续下一循环。
若接近开关PS0断开即球槽内无球,则机械臂回原位,整个装置停止运行。
2
第2章大、小球分拣传送系统的硬件电路设计
2.1大、小球分拣传送系统功能说明
机械手分拣大小球的控制功能如下:
1.原位:
机械臂原始状态为左上角原位处,即上限开关LS3及左限开关LS1压合,同时机械臂处于无磁状态和球槽内有球或无球状态(接近开关PS吸合或断开),这时原位显示灯亮,表示准备就绪。
2.按下启动按钮SB1后,机械臂的电磁铁无磁,机械臂下降,接近开关SQ闭合后,机械臂会碰到球,接着电磁铁加磁。
如果同时碰到下限开关LS2,则一定是小球;
如果此时未碰到下限开关LS2,则一定是大球。
3.机械臂吸住球后(接近开关SQ闭合后)就提升,碰到上限开关LS3后就右行。
4.如果是小球,则右行到LS4处;
如果是大球,则右行到LS5处。
5.机械臂下降,经过1S后将小球释放到小球容器中;
如果是大球,则释放到大球容器中。
6.释放后机械臂提升,碰到上限开关LS3后,开始左行。
7.机械臂左行至碰到左限开关LS1后,一个工作循环结束,如果此时接近开关PSO显示球槽内还有球,则继续下一循环;
若无球,则工作停止。
8.控制系统停止有两种情况;
(1)接近开关PSO显示球槽内无球则循环结束;
(2)按下停止按钮SB2则运行完此次循环后停止到原点;
(3)按下急停按钮SB3,系统立刻停止工作,不管已经工作到什么位置。
9.当系统在连续运行时,停止方式有两种,一种是正常停止:
就是按下停止按钮后,系统要将整个周期剩下的步骤全部进行完,然后回到原点才停止工作。
另外一种是紧急停止:
就是用来处理紧急情况下来及时停止整个系统工作的,一按紧急停止按钮SB3,系统立刻停止工作,不管已经工作到什么位置。
但此时,电磁铁线圈仍处于有电状态,以保证紧急停止后不放球,保证安全。
2.2设计主电路原理图
如图2-1中,主电路采用两个电动机、四个接触器即正转接触器KM1(KM3)和反转接触器KM2(KM4)控制。
当接触器KM1(KM3)的三对主触头接通时,三相电源的相序按U―V―W接入电动机。
当接触器KM1(KM3)的三对主触头断开,接触器KM2(KM4)的三对主触头接通时,三相电源的相序按W―V―U接入电动机,电动机就向相反方向转动。
利用两台电动机的正反转,分别控制机械臂的上、下、左、右行。
3
2-1主电路原理图图2.3机械臂分拣大、小球控制的运行框图层控制,加循环控制流程,一直到没有球之后便自个网络,共11运行框图分为12动原点复位停止,也可以按停止按钮到这一循环结束后停止在原点位置。
重新按下启动2-2所示。
按钮后,再次开始,具体过程如图的类型确定I/O信号数量,选择PLC2.4
(如西门PLC对于开关量控制系统的应用系统,当对控制要求不高时,可选用小型)就能满足要求,如对小CPM1A/CPM2A型PLC或子公司S7-200系列PLCOMON公司系列型泵的顺序控制、单台机械的自动控制等。
对于以开关量控制为主,带有部分模拟量控制的应用系统,如对工业生产中常遇到转换的模拟量输入模块和的温度、压力、流量、液位等连续量的控制,应选用带有A/D转换的模拟量输出模块,配接相应的传感器、变送器和驱动装置,并且选择运带有D/ACOM/CQM1HOMRONPLC或公司的S7-300算功能较强的中小型PLC,如西门子公司的系列型PLC。
调节、通信联信网等,可选用对于比较复杂的中大型控制系统,如闭环控制、PID、公司的或系列(如西门子公司的中大型PLCS7-400PLCOMRONC200HE/C200HG/C200HX4
CV/CVM1等PLC)。
当系统的各个控制对象分布在不同的地域时,应根据各部分的具体要求来选择PLC,组成一个分布式的控制系统。
PLC的结构分为整体式和模块式两种。
整体式结构把PLC的I/O和CPU放在一块电路板上,省去插接环节,体积小,每一I/O点的平均价格比模块式的便宜,适用于工艺过程比较稳定、控制要求比较简单的系统。
模块式PLC的功能扩展,I/O点数的增减,输入与输出点数的比例,都比整体式灵活。
维修更换模块、判断与处理故障快方便,适用于工艺过程变化教多、控制要求复杂的系统。
在使用时,应按实际具体情况进行选择。
根据系统分析得输入点有10个,分别为I0.0-I1.1;
输出点有6个,分别为Q0.1-Q0.5、Q0.7。
I/O点共16个。
结合以上几点,在设计PLC机械手在大小球分选系统中用的PLC的选型为西门子S7-200系列的可编程控制器(CPU--224)PLC。
2.5机械臂分拣大、小球控制的电器元件I/O分配表
S7—200系列(CPU--224)PLC有14DI/10DO,本次设计只需10个输入,6个输出,具体I/O分配表如表2-1。
2.6机械臂分拣大小球控制的I/O接线图
由PLC控制继电器线圈来控制主电路的上下左右运动和机械臂抓释小球.PLC控制继电器和电灯的输出,从而控制主电路。
采用S7—200系列(CPU--224)PLC,输入端分两组共十个接口,输出端分两组共六个接口,具体如图2-3。
5
10被压LS机械臂在原位LS86东西4按下启动按钮,机械臂下北2第三季第一季
按下急停按钮LS闭合下限开NY设备急小大吸盘电磁吸盘电磁线圈通线圈通
机械臂吸球后,机械臂吸住球后闭近开接近开S闭S
机械臂上行,机械臂上行,后右LS后右LS
LS后下机械臂压后下机械臂压LS
后,球机械臂压LS机械臂压LS后,球到球箱,机械臂返回原到球箱,机械臂返回原
球槽内是否有球(近开关是否闭合)
 升级会员
升级会员 