海淀区高三物理一模试题和答案204Word文档格式.docx
《海淀区高三物理一模试题和答案204Word文档格式.docx》由会员分享,可在线阅读,更多相关《海淀区高三物理一模试题和答案204Word文档格式.docx(15页珍藏版)》请在冰豆网上搜索。
A.1g水和1g氧气所含分子个数相同
B.液体分子的无规则运动称为布朗运动
C.分子间的引力与斥力的大小都随分子间距离的增大而减小
D.在物体温度不断升高的过程中,物体内每个分子热运动的动能都一定在增大
3.一定质量的理想气体,在温度保持不变的条件下,若气体体积减小,则
A.气体的内能增大
B.外界一定对气体做正功
C.气体的压强可能不变
D.气体压强与体积的乘积变小
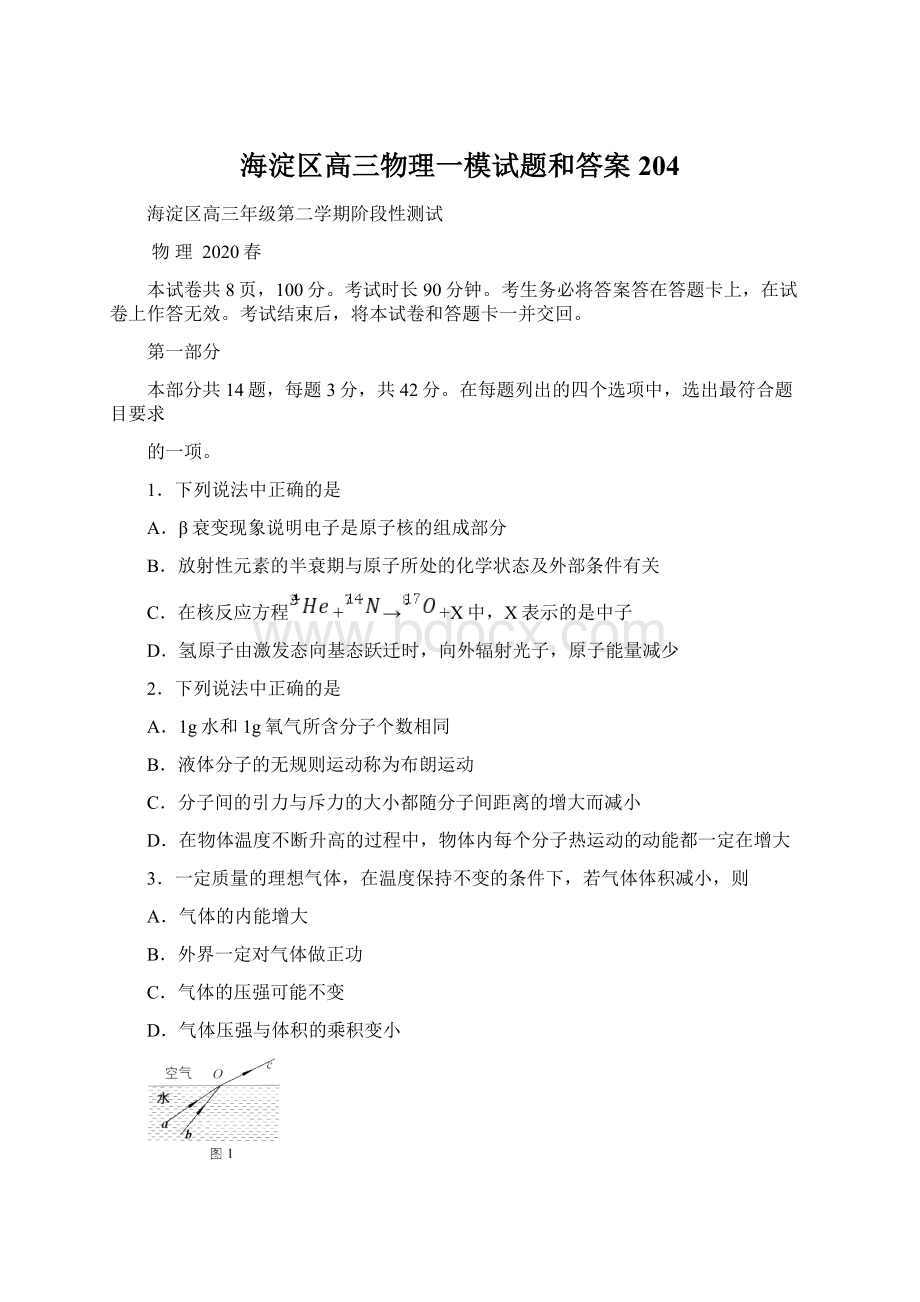
4.如图1所示,两束单色光a和b从水中射向水面的O点,它们进入空气后的光合成一束光c。
根据这一现象可知,下列说法中正确的是
A.水对a光的折射率较大
B.从水射向空气时,a光全反射的临界角小于b光的临界角
C.两束光在从水进入空气时频率均保持不变
D.若a光照射到某金属上能发生光电效应,则b光照射该金属上不一定能发生光电效应
5.分别在地球表面和月球表面对同一物体施加瞬时冲量,使物体以相同初速度竖直上抛(其上升的最大高度远小于月球的半径)。
已知月球表面的重力加速度可认为是地球表面重力加速度的1/6,不计空气阻力及地球和月球自转的影响,下列说法中正确的是
A.物体在月球表面上升的最大高度为在地球表面上的6倍
B.物体在月球表面上升至最高点的时间是在地球表面上的36倍
C.从最高点落回到抛出点的过程中,地球引力与月球引力对物体做功的功率相同
D.从抛出点至落回到抛出点的过程中,地球引力与月球引力对物体的冲量均为零
6.一列沿x轴传播的简谐横波,其周期T=0.20s,在t=0时的波形图象如图2所示。
其中P、Q是介质中平衡位置分别处在x=1.0m和x=4.0m的两个质点,若此时质点P在正向最大位移处,质点Q通过平衡位置向下运动,则
A.该波沿x轴正方向传播
B.该波的传播速度为2.0m/s
C.当质点Q到达波谷时,质点P位于平衡位置且向上运动
D.经过0.50s,质点Q通过的路程为10cm
7.如图3甲所示的理想变压器,其原线圈接在输出电压如图3乙所示的正弦式交流电源上,副线圈接有阻值为88Ω的负载电阻R,原、副线圈匝数之比为5:
1。
电流表、电压表均为理想交流电表。
下列说法中正确的是
A.电流表的示数为2.5A
B.电压表的示数约为62V
C.原线圈的输入功率为22W
D.若负载电阻R的阻值变大,则原线圈的输入功率也变大
8.2020年3月9日,我国在西昌卫星发射中心成功发射北斗系统第54颗导航卫星,北斗导航工程实现2020年“开门红”。
北斗卫星导航系统由地球同步静止轨道卫星、与同步静止轨道卫星具有相同周期的地球同步倾斜轨道卫星,以及比它们轨道低一些的中轨道卫星组成。
它们均为圆轨道卫星,轨道分布情况如图4所示,则
A.地球同步倾斜轨道卫星可相对静止在北京上空
B.地球同步倾斜轨道卫星的轨道高度大于同步静止轨道卫星的轨道高度
C.所有同步卫星绕地球运动的速率都一定小于中轨道卫星绕地球运动的速率
D.质量相等的中轨道卫星与同步轨道卫星相比,中轨道卫星所具有的机械能较大
9.如图5所示,在一通有恒定电流的长直导线的右侧,有一带正电的粒子以初速度v0沿平行于导线的方向射出。
若粒子所受重力及空气阻力均可忽略不计,现用虚线表示粒子的运动轨迹,虚线上某点所画有向线段的长度和方向表示粒子经过该点时的速度大小和方向,则如图6所示的图景中可能正确的是
10.如图7所示,在电场强度为E的水平匀强电场中,有一足够大的绝缘光滑水平面,一根长为L的绝缘轻软细绳一端固定在平面上的O点,另一端系有一个质量为m、带电荷量为+q的小球A(可看作质点)。
当小球A在水平面上静止时,细绳被拉直且与OO′重合,OO′的方向与电场方向平行。
在水平面内将小球由平衡位置拉开一小段距离,保持细绳拉直,直至细绳与OO′间有一个小角度θ后由静止释放,不计空气阻力,则下列说法中正确的是
A.小球A在运动过程中的加速度大小恒为
B.细绳通过OO′后小球A速度为0时,细绳与OO′的夹角大于θ
C.细绳通过OO′时小球A的速度与其质量m无关
D.小球A释放后经历的时间,细绳会与OO′重合
图8
砂桶
纸带
垫块
小车
打点计时器
11.研究小组的同学们用如图8所示的装置探究物体的加速度与力、质量的关系之后,对此实验又做了进一步的分析:
在实验前通过垫块已经平衡了阻力,且砂和砂桶的总质量远小于小车和车上砝码的总质量,若将小车(含车上砝码)和砂(含砂桶)当成一个系统(包括地球),由静止释放小车后,下列说法中正确的是
A.系统动量守恒,机械能守恒
B.系统动量不守恒,机械能守恒
C.系统动量守恒,机械能不守恒
D.系统动量不守恒,机械能不守恒
12.麦克斯韦在前人研究的基础上,创造性地建立了经典电磁场理论,进一步揭示了电现象与磁现象之间的联系。
他大胆地假设:
变化的电场就像导线中的电流一样,会在空间产生磁场,即变化的电场产生磁场。
以平行板电容器为例:
圆形平行板电容器在充、放电的过程中,板间电场发生变化,产生的磁场相当于一连接两板的板间直导线通以充、放电电流时所产生的磁场。
如图9所示,若某时刻连接电容器的导线具有向上的电流,则下列说法中正确的是
A.电容器正在充电
B.两平行板间的电场强度E在减小
C.该变化电场产生顺时针方向(俯视)的磁场
D.两极板间电场最强时,板间电场产生的磁场达到最大值
13.如图10所示,物理图象不仅反映了两个相关量之间的数值关系,其上任一点的切线斜率有时也有相应的物理含义。
例如对于直线运动,若y轴表示物体的速度,x轴表示时间,则其图象切线的斜率表示物体的加速度。
下面说法中不正确的是
A.对于单匝闭合导线圈,若y轴表示磁通量,x轴表示时间,则图象切线的斜率表示线圈中感应电动势的大小
B.对于某电子元件,若y轴表示其两端的电压,x轴表示流过它的电流,则图象切线的斜率表示该元件的电阻
x
图11
ω
转轴
y
O
C.对于做直线运动的物体,若y轴表示物体的动量,x轴表示时间,则图象切线的斜率表示物体受到的合外力
D.对于静电场,若y轴表示电势,x轴表示位置,则图象切线斜率的绝对值表示电场强度在x方向上的分量大小
14.我们知道,处于自然状态的水都是向重力势能更低处流动的,当水不再流动时,同一滴水在水表面的不同位置具有相同的重力势能,即水面是等势面。
通常稳定状态下水面为水平面,但将一桶水绕竖直固定中心轴以恒定的角速度ω转动,稳定时水面呈凹状,如图11所示。
这一现象依然可用等势面解释:
以桶为参考系,桶中的水还多受到一个“力”,同时水还将具有一个与这个“力”对应的“势能”。
为便于研究,在过桶竖直轴线的平面上,以水面最低处为坐标原点、以竖直向上为y轴正方向建立xOy直角坐标系,质量为m的小水滴(可视为质点)在这个坐标系下具有的“势能”可表示为。
该“势能”与小水滴的重力势能之和为其总势能,水会向总势能更低的地方流动,稳定时水表面上的相同质量的水将具有相同的总势能。
根据以上信息可知,下列说法中正确的是
A.与该“势能”对应的“力”的方向指向O点
B.与该“势能”对应的“力”的大小随x的增加而减小
C.该“势能”的表达式是选取了y轴处“势能”为零
D.稳定时桶中水面的纵截面为圆的一部分
第二部分
本部分共6题,共58分。
15.(7分)在“用双缝干涉测光的波长”实验中,将双缝干涉实验仪按要求安装在光具座上(如图12),单缝保持竖直方向,并选用缝间距为d的双缝屏。
从仪器注明的规格可知,毛玻璃屏与双缝屏间的距离为L。
接通电源使光源正常工作。
(1)组装仪器时,单缝和双缝的空间关系应该为。
A.a代表单缝,b代表双缝
B.a代表双缝,b代表单缝
C.二者相互垂直放置
D.二者相互平行放置
(2)将红色滤光片改为绿色滤光片,其他实验条件不变,在目镜中仍可看见清晰的条纹,则。
A.条纹为竖条纹B.条纹为横条纹
C.与红光相比条纹间距变窄D.与红光相比条纹间距变宽
(3)经计算可得两个相邻明纹(或暗纹)间的距离为Δx,则这种色光的波长表达式为λ=(用题中所给字母表示)。
16.(11分)用如图13所示装置验证机械能守恒定律。
(1)除带夹子的重物、纸带、铁架台(含夹子)、电磁打点计时器、导线及开关外,在下列器材中,还需要使用的一组器材是。
A.直流电源、天平(含砝码)
B.直流电源、刻度尺
C.交流电源、天平(含砝码)
D.交流电源、刻度尺
(2)实验中,先接通电源,再释放重物,得到如图14所示的一条纸带。
在纸带上选取连续打出的5个点A、B、C、D、E,测得C、D、E三个点到起始点O的距离分别为hC、hD、hE。
已知当地重力加速度为g,打点计时器打点的周期为T。
设重物的质量为m,则从打下O点到打下D点的过程中,重物的重力势能减少量为,动能增加量为。
(用上述测量量和已知量的符号表示)
(3)对于上述实验,有的同学提出研究的运动过程的起点必须选择在O点,你同意这种看法吗?
如果同意请你说明理由;
如果不同意,请你给出当起点不在O点时,实验中验证机械能守恒的方法。
(4)机械能包括动能、重力势能和弹性势能,为了在三种能量相互转化的情况下再次验证机械能守恒定律,实验小组设计了如图15所示的实验装置。
力传感器一端固定在铁架台的横梁上,另一端与轻弹簧相连,轻弹簧下端悬挂着下表面水平的重物,在重物正下方放置着上表面水平的运动传感器,两个传感器再通过数据采集器和电脑相连(图未画出)。
实验过程中保持铁架台固定,弹簧始终在弹性限度内,重物只在竖直方向上下运动,没有转动。
他们首先用天平测得重物的质量为m,然后:
用运动传感器实时记录重物的速度继而得到重物的动能Ek;
选择运动传感器的上表面所在位置为重力势能零点,用运动传感器实时记录重物下表面与运动传感器上表面的距离,继而得到重物的重力势能Ep;
将弹簧原长时重物下表面到运动传感器上表面间的距离,与物体运动过程中这两个表面间的实时距离之差作为弹簧形变量,结合力传感器测得的弹力大小F,通过计算得到了弹簧在每个时刻的弹性势能E弹。
分析上述三种能量之和E随时间的变化情况,如果在误差允许的范围内,E随时间保持不变,则可认为重物(包括地球)和弹簧组成的系统机械能守恒。
已知实验得到的F-t图象如图16所示,则如图17所示的图象中可能正确的是。
图17
E弹
t
B
T
2T
3T
Ep
A
E
D
Ek
C
17.(9分)如图18所示,在距水平地面高h=0.80m的水平桌面左边缘有一质量mA=1.0kg的物块A以v0=5.0m/s的初速度沿桌面运动,经过位移s=1.8m与放在桌面右边缘O点的物块B发生正碰,碰后物块A的速度变为0,物块B离开桌面后落到地面上。
设两物块均可视为质点,它们的碰撞时间极短,物块A与桌面间的动摩擦因数μ=0.25,物块B的质量mB=1.6kg,重力加速度g=10m/s2。
求:
(1)两物块碰撞前瞬间,物块A的速度大小vA;
(2)物块B落地点到桌边缘O点的水平距离x;
 升级会员
升级会员 