工业机器人的发展历史Word文档格式.doc
《工业机器人的发展历史Word文档格式.doc》由会员分享,可在线阅读,更多相关《工业机器人的发展历史Word文档格式.doc(13页珍藏版)》请在冰豆网上搜索。
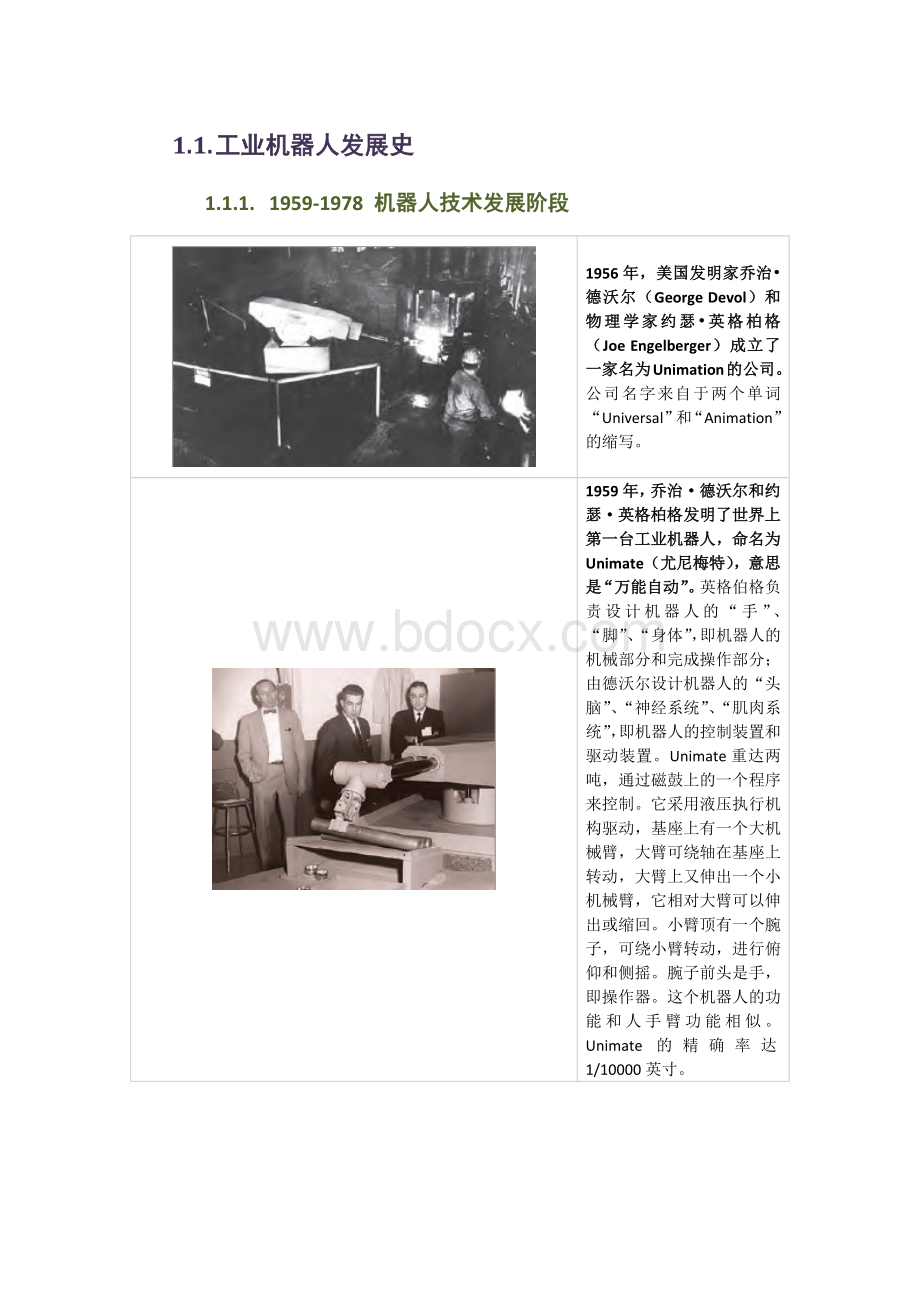
它采用液压执行机构驱动,基座上有一个大机械臂,大臂可绕轴在基座上转动,大臂上又伸出一个小机械臂,它相对大臂可以伸出或缩回。
小臂顶有一个腕子,可绕小臂转动,进行俯仰和侧摇。
腕子前头是手,即操作器。
这个机器人的功能和人手臂功能相似。
Unimate的精确率达1/10000英寸。
1961年,Unimation公司生产的世界上第一台工业机器人在美国特伦顿(新泽西州首府)的通用汽车公司安装运行。
这台工业机器人用于生产汽车的门、车窗把柄、换档旋钮、灯具固定架,以及汽车内部的其他硬件等。
遵照磁鼓上的程序指令,Unimate机器人4000磅重的手臂可以按次序堆叠热压铸金属件。
Unimate机器人成本耗资65000美元,但unimation公司售价仅为18000美元。
1962年,美国机械与铸造公司(AmericanMachineandFoundry,AMF)制造出世界上第一台圆柱坐标型工业机器人,命名为Verstran(沃尔萨特兰),意思是“万能搬动”。
1962年,AMF制造的6台Verstran机器人应用于美国坎顿(Canton)的福特汽车生产厂。
1969年,通用汽车公司在其洛兹敦(Lordstown)装配厂安装了首台点焊机器人。
Unimation机器人大大提高了生产率,90%以上的车身焊接作业可通过机器人来自动完成。
只有20%-40%的传统生产厂的焊接工作由人工完成。
1969年,挪威Trallfa公司提供了第一个商业化应用的喷漆机器人。
在1967年挪威劳动力短缺期间曾使用机器人来喷涂独轮手推车(wheelbarrows),第一款商用喷漆机器人就由此发展而来。
1969年,Unimation公司的工业机器人进入日本市场。
Unimation公司与日本川崎重工(KawasakiHeavyIndustries)签订许可协议,生产Unimate机器人专供亚洲市场销售。
川崎把开发和生产能节省劳动力的机器人和系统作为一项重要任务来完成,成为日本在工业机器人领域的先驱。
1969年,川崎重工公司成功开发了Kawasaki-Unimate2000机器人,这是日本生产的第一台工业机器人。
1970年,在美国芝加哥举行第一届美国工业机器人研讨会。
一年以后,该研讨会升级为国际工业机器人研讨会(InternationalSymposiumonIndustrialRobots,ISIR)。
举行国际工业机器人研讨会的目的是给在机器人领域的世界各地的研究人员和工程师提供一个机会以展示他们的作品,并分享自己的想法。
1997年,该研讨会更名为国际机器人研讨会(InternationalSymposiumonRobotics,ISR),其中包括服务机器人的技术。
目前,国际机器人研讨会(ISR)继续开展有关机器人的所有科学、技术和产业发展的会议议题。
研讨会的主要目的是加强学术界和产业界的联系。
现在的ISR配合国际机器人展每年举办一次,由美国、欧洲或亚洲的某个国家机器人协会主办。
1973年,第一台机电驱动的6轴机器人面世。
德国库卡公司(KUKA)将其使用的Unimate机器人研发改造成其第一台产业机器人,命名为Famulus,这是世界上第一台机电驱动的6轴机器人。
1973年,日本日立公司(Hitachi)开发出为混凝土桩行业使用的自动螺栓连接机器人。
这是第一台安装有动态视觉传感器的工业机器人。
它在移动的同时能够认识浇铸模具上螺栓的位置,并且和浇铸模具的移动同步,完成螺栓拧紧和拧松工作。
1974年,第一台小型计算机控制的工业机器人走向市场。
1974年,美国辛辛那提米拉克龙(CincinnatiMilacron)公司的理查德·
霍恩(RichardHohn)开发出第一台由小型计算机控制的工业机器人,命名为T3,即“TheTomorrowTool”。
这是世界上第一次机器人和小型计算机的携手合作。
1971年,日本机器人协会(JapaneseRobotAssociation)成立。
这是世界上第一个国家机器人协会。
日本机器人协会最初是一个非官方的自发组织,以开展工业机器人座谈会的形式成立。
1972年,工业机器人座谈会改名为日本工业机器人协会(JapanIndustrialRobotAssociation,JIRA),1973年正式注册成立。
1994年改为现名――日本机器人协会(JapaneseRobotAssociation,JARA)。
日本工业机器人协会更名为日本机器人协会,是因为机器人领域的重大进展导致了对机器人需求的多样化,机器人由制造业扩展到非制造业,例如,核电站、医疗服务及福利事业,民用工程及建筑业以及海洋事业等方面。
1974年,第一台弧焊机器人在日本投入运行。
日本川崎重工公司将用于制造川崎摩托车框架的Unimate点焊机器人改造成弧焊机器人。
同年,川崎还开发了世界上首款带精密插入控制功能的机器人,命名为“Hi-T-Hand”,该机器人还具备触摸和力学感应功能。
这款机器人手腕灵活并带有力反馈控制系统,因此它可以插入一个约10微米间隙的机械零件。
1974年,瑞典通用电机公司(ASEA,ABB公司的前身)开发出世界上第一台全电力驱动、由微处理器控制的工业机器人IRB6。
IRB6主要应用于工件的取放和物料的搬运,首台IRB6运行于瑞典南部的一家小型机械工程公司。
IRB6采用仿人化设计,其手臂动作模仿人类的手臂,载重6公斤载荷,5轴。
IRB6的S1控制器是第一个使用英特尔8位微处理器,内存容量为16KB。
控制器有16个数字I/O接口,通过16个按键编程,并具有四位数的LED显示屏。
1975年,Olivetti公司开发出直角坐标机器人“西格玛(SIGMA)”,它是一个应用于组装领域的工业机器人,在意大利的一家组装厂安装运行。
1977年,首届恩格柏格(Engelberger)机器人奖颁布。
恩格柏格机器人奖是世界上最负盛名的机器人荣誉。
该奖项授给那些在机器人产业的技术开发、应用领域作出卓越贡献的个人。
每位获奖者获得一笔酬金和带有下面题词的纪念章,“在为人类服务的机器人科学的进步做出贡献。
”
恩格柏格机器人奖每年由机器人工业协会(RoboticIndustriesAssociation,RIA)授予给世界各地在机器人领域作出杰出贡献的个人。
自1977年首届恩格柏格机器人奖颁布以来,至今该奖项已授给世界上17个不同国家的114名杰出个人。
1978年,美国Unimation公司推出通用工业机器人(ProgrammableUniversalMachineforAssembly,PUMA),应用于通用汽车装配线,这标志着工业机器人技术已经完全成熟。
PUMA至今仍然工作在工厂第一线。
1978年,日本山梨大学(UniversityofYamanashi)的牧野洋(HiroshiMakino)发明了选择顺应性装配机器手臂(SelectiveComplianceAssemblyRobotArm,SCARA)。
SCARA机器人具有四个轴和四个运动自由度(包括X、Y、Z方向的平动自由度和绕Z轴的转动自由度)。
SCARA系统在x、y方向上具有顺从性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作。
SCARA的另一个特点是其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件,如集成电路板等。
1978年,德国徕斯(Reis)机器人公司开发了首款拥有独立控制系统的六轴机器人RE15。
RE15机器人首次在德国杜塞尔多夫(Duesseldorf)举办的国际铸造贸易博览会(GIFA)上展示。
1.1.2.1979-2011智能机器人技术发展阶段
1979年,日本不二越株式会社(Nachi)研制出第一台电机驱动的机器人。
这台电机驱动的点焊机器人开创了电力驱动机器人的新纪元,从此告别液压驱动机器人时代。
1981年,美国卡内基-梅隆大学的TakeoKanade设计开发出世界上第一个直接驱动机器人手臂(DirectDriveRoboticArms)。
直接驱动机器人手臂在当时是设计最好的机械臂,因为它免去了电机和负荷之间的传输机械机构,因而不会出现由于使用减速器和铰链而产生的不平滑运动,机械手臂可以自由、平稳地移动,满足机器人完成高速精密的动作。
该机器人手臂的设计完成于1981年,但几年以后才成功获得专利。
TakeoKanade于1989-1993年在卡内基-梅隆大学任职期间,还创立了世界上第一个有关机器人的博士课程。
1981年,美国PaRSystems公司推出第一台龙门式工业机器人。
龙门式机器人的运动范围比基座机器人(pedestalrobots)大很多,可取代多台机器人(2010年,PaRSystems公司迎来50周年庆)。
1984年,美国AdeptTechnology公司开发出第一台直接驱动的选择顺应性装配机器手臂(SCARA),命名为AdeptOne。
直接驱动是AdeptOne机器人的最主要特点,AdeptOne的电力驱动马达和机器手臂直接连接,省去了中间齿轮或链条系统。
由于消除了存在于传统间接驱动方式中的机械间隙摩擦及低刚度等不利因素,从而简化精练了控制模型,提高了伺服刚度及响应速度,因此,AdeptOne机器人能显著提高机器人合成速度及定位精度。
1985年,德国库卡公司(KUKA)开发出一款新的Z形机器人手臂,它的设计摒弃了传统的平行四边形造型。
该Z形机器人手臂可实现3个平移运动和3个旋转运动共6个自由度的运动维度,可大大节省制造工厂的场地空间。
1987年,国际机器人联合会(InternationalFederationofRobotics,IFR)成立。
在1987年举办的第17届国际工业机器人研讨会上,来自15个国家的机器人组织成立了国际机器人联合会(IFR)。
IFR是一个非营利性的专业化组织,以推动机器人领域里的研究、开发、应用和国际合作为己任,在与机器人技术相关的活动中已成为一个重要的国际组织。
IFR的主要活动包括:
对全世界机器人技术的使用情况进行调查、研究和统计分析,提供主要数据;
主办年度国际机器人研讨会;
协作制定国际标准;
鼓励新兴机器人技术领域里的研究与开发;
与其他的国家或国际组织建立联系并开展积极合作;
通过与制造商、用户、大学和其他有关组织的合作,促进机器人技术的应用和传播。
1992年,瑞士的Demaurex公司出售其第一台应用于包装领域的三角洲机器人(Deltarobot)给罗兰公司(Roland)。
三角洲机器人是一个并联的手臂机器人,由洛桑联邦理工学院(洛桑联邦理工大学)(FederalInstituteofTechnologyofLausanne,EPFL)的ReymondClavel教授发明的。
三角洲机器人的基座安装在工作平台上,从基座延伸出3个互相连接的机器人手臂。
这些机器人手臂的两端连接到一个小三角平台上,机器人手臂将沿X,Y或Z方向的三角平台
 升级会员
升级会员 