机械原理答案docx.docx
《机械原理答案docx.docx》由会员分享,可在线阅读,更多相关《机械原理答案docx.docx(44页珍藏版)》请在冰豆网上搜索。
机械原理答案docx
第二章平面机构的结构分析
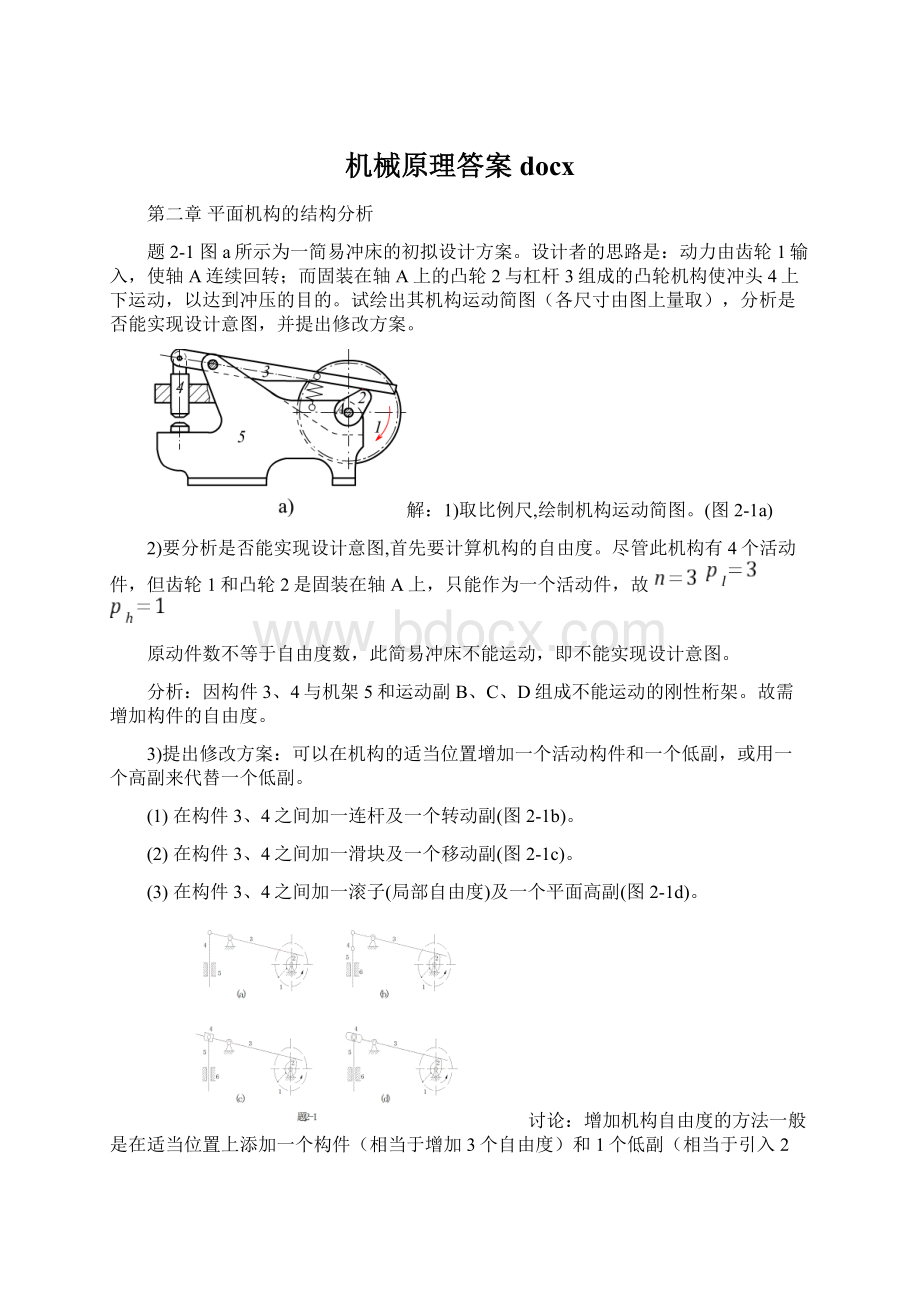
题2-1图a所示为一简易冲床的初拟设计方案。
设计者的思路是:
动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:
1)取比例尺,绘制机构运动简图。
(图2-1a)
2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A上,只能作为一个活动件,故
原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:
因构件3、4与机架5和运动副B、C、D组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:
可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1)在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2)在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3)在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
讨论:
增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b)(c)所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d)所示。
题2-2图a所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:
分析机构的组成:
此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5与机架9、滑块7与冲头8均组成转动副,滑杆3与机架9、摆杆4与滑块7、冲头8与机架9均组成移动副,齿轮1与齿轮5、凸轮(槽)5与滚子6组成高副。
故
解法一:
解法二:
局部自由度
题2-3如图a所示为一新型偏心轮滑阀式真空泵。
其偏心轮1绕固定轴A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
当偏心轮1按图示方向连续转动时,可将设备中的空气按图示空气流动方向从阀5中排出,从而形成真空。
由于外环2与泵腔6有一小间隙,故可抽含有微小尘埃的气体。
试绘制其机构的运动简图,并计算其自由度。
解:
1)取比例尺,绘制机构运动简图。
(如图题2-3所示)
2)
题2-4使绘制图a所示仿人手型机械手的食指机构的机构运动简图(以手指8作为相对固定的机架),并计算其自由度。
解:
1)取比例尺,绘制机构运动简图。
(如图2-4所示)
2)
题2-5图a所示是为高位截肢的人所设计的一种假肢膝关节机构,该机构能保持人行走的稳定性。
若以颈骨1为机架,
试绘制其机构运动简图和计算其自由度,并作出大腿弯曲90度时的机构运动简图。
解:
1)取比例尺,绘制机构运动简图。
大腿弯曲90度时的机构运动简图如虚线所示。
(如图2-5所示)
2)
题2-6试计算如图所示各机构的自由度。
图a、d为齿轮-连杆组合机构;图b为凸轮-连杆组合机构(图中在D处为铰接在一起的两个滑块);图c为一精压机机构。
并问在图d所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同?
为什么?
解:
a)
b)解法一:
解法二:
虚约束局部自由度
c)解法一:
解法二:
虚约束局部自由度
d)
齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1个约束。
齿条7与齿轮5的啮合为高副(因中心距未被约束,故应为双侧接触)将提供2个约束。
题2-7试绘制图a所示凸轮驱动式四缸活塞空气压缩机的机构运动简图。
并计算其机构的自由度(图中凸轮1原动件,当其转动时,分别推动装于四个活塞上A、B、C、D处的滚子,使活塞在相应得气缸内往复运动。
图上AB=BC=CD=AD)。
解:
1)取比例尺,绘制机构运动简图。
(如图2-7(b)所示)
2)此机构由1个凸轮、4个滚子、4个连杆、4个活塞和机架组成。
凸轮与4个滚子组成高副,4个连杆、4个滚子和4个活塞分别在A、B、C、D处组成三副复合铰链。
4个活塞与4个缸(机架)均组成移动副。
解法一:
虚约束:
因为,4和5,6和7、8和9为不影响机构传递运动的重复部分,与连杆10、11、12、13所带入的约束为虚约束。
机构可简化为图2-7(b)
重复部分中的构件数低副数高副数局部自由度
局部自由度
解法二:
如图2-7(b)
局部自由度
题2-8图示为一刹车机构。
刹车时,操作杆1向右拉,通过构件2、3、4、5、6使两闸瓦刹住车轮。
试计算机构的自由度,并就刹车过程说明此机构自由度的变化情况。
(注:
车轮不属于刹车机构中的构件。
)
解:
1)未刹车时,刹车机构的自由度
2)闸瓦G、J之一刹紧车轮时,刹车机构的自由度
3)闸瓦G、J同时刹紧车轮时,刹车机构的自由度
题2-9试确定图示各机构的公共约束m和族别虚约束p″,并人说明如何来消除或减少共族别虚约束。
解:
(a)楔形滑块机构的楔形块1、2相对机架只能在该平面的x、y方向移动,而其余方向的相对独立运动都被约束,故公共约束数,为4族平面机构。
将移动副改为圆柱下刨,可减少虚约束。
(b)由于齿轮1、2只能在平行平面内运动,故为公共约束数,为3族平面机构。
将直齿轮改为鼓形齿轮,可消除虚约束。
(c)由于凸轮机构中各构件只能在平行平面内运动,故为的3族平面机构。
将平面高副改为空间高副,可消除虚约束。
题2-10图示为以内燃机的机构运动简图,试计算自由度,并分析组成此机构的基本杆组。
如在该机构中改选EG为原动件,试问组成此机构的基本杆组是否与前者不同。
解:
1)计算此机构的自由度
2)取构件AB为原动件时机构的基本杆组图2-10(b)所示。
此机构为二级机构。
3)取构件GE为原动件时机构的基本杆组图2-10(c)所示。
此机构为三级机构。
题2-11图a所示为一收放式折叠支架机构。
该支架中的件1和5分别用木螺钉联接于固定台板1`和活动台板5`上,两者在D处铰接,使活动台板能相对于固定台板转动。
又通过件1、2、3、4组成的铰链四杆机构及连杆3上E点处销子与件5上的连杆曲线槽组成的销槽联接使活动台板实现收放动作。
在图示位置时,虽在活动台板上放有较重的重物,活动台板也不会自动收起,必须沿箭头方向推动件2,使铰链B、D重合时,活动台板才可收起(如图中双点划线所示)。
现已知机构尺寸lAB=lAD=90mm,lBC=lCD=25mm,试绘制机构的运动简图,并计算其自由度。
解:
1)取比例尺,绘制机构运动简图。
(如图2-11所示)
2)E处为销槽副,销槽两接触点公法线重合,只能算作一个高副。
第三章平面机构的运动分析
题3-1试求图示各机构在图示位置时全部瞬心的位置(用符号Pij直接标注在图上)
解:
题3-2在图示在齿轮-连杆机构中,试用瞬心法求齿轮1与齿轮3的传动比w1/w3.
解:
1)计算此机构所有瞬心的数目
2)为求传动比需求出如下三个瞬心、、如图3-2所示。
3)传动比计算公式为:
题3-3在图a所示的四杆机构中,lAB=60mm,lCD=90mm,lAD=lBC=120mm,ω2=10rad/s,试用瞬心法求:
1)当φ=165°时,点C的速度Vc;
2)当φ=165°时,构件3的BC线上速度最小的一点E的位置及速度的大小;
3)当Vc=0时,φ角之值(有两个解)
解:
1)以选定比例尺,绘制机构运动简图。
(图3-3)
2)求VC,定出瞬心P13的位置。
如图3-3(a)
3)定出构件3的BC线上速度最小的点E的位置。
因为BC线上速度最小的点必与P13点的距离最近,所以过P13点引BC线延长线的垂线交于E点。
如图3-3(a)
4)当时,P13与C点重合,即AB与BC共线有两个位置。
作出的两个位置。
量得
题3-4在图示的各机构中,设已知各构件的尺寸、原动件1以等角速度ω1顺时针方向转动。
试用图解法求机构在图示位置时构件3上C点的速度及加速度。
解:
a)速度方程:
加速度方程:
b)速度方程:
加速度方程:
b)速度方程:
加速度方程:
题3-5在图示机构中,已知各构件的尺寸及原动件1的角速度ω1(为常数),试以图解法求φ1=90°时,构件3的角速度ω3及角加速度α3(比例尺如图)。
(应先写出有关的速度、加速度矢量方程,再作图求解。
)
解:
1)速度分析:
图3-5(b)
速度方程:
速度多边形如图3-5(b)
转向逆时针
2)加速度分析:
图3-5(c)
转向顺时针。
题3-6在图示的摇块机构中,已知lAB=30mm,lAC=100mm,lBD=50mm,lDE=40mm。
曲柄以等角速度ω1=10rad/s回转,试用图解法求机构在φ1=45°位置时,点D和点E的速度和加速度,以及构件2的角速度和角加速度。
解:
1)选定比例尺,绘制机构运动简图。
(图3-6(a))
2)速度分析:
图3-6(b)
速度方程
由速度影像法求出VE速度多边形如图3-6(b)
(顺时针)
3)加速度分析:
图3-6(c)
由加速度影像法求出aE加速度多边形如图3-6(c)
(顺时针)
题3-7在图示的机构中,已知lAE=70mm,lAB=40mm,lEF=60mm,lDE=35mm,lCD=75mm,lBC=50mm,原动件1以等角速度ω1=10rad/s回转,试以图解法求点C在φ1=50°时的速度Vc和加速度ac。
解:
1)速度分析:
以F为重合点(F1、F5、、F4)有速度方程:
以比例尺速度多边形如图3-7(b),由速度影像法求出VB、VD
2)加速度分析:
以比例尺
有加速度方程:
由加速度影像法求出aB、aD
题3-8在图示的凸轮机构中,已知凸抡1以等角速度转动,凸轮为一偏心圆,其半径,试用图解法求构件2的角速度与角加速度。
解:
1)高副低代,以选定比例尺,绘制机构运动简图。
(图3-8)
2)速度分析:
图3-6(b)
取B4、、B2
为重合点。
速度方程:
速度多边形如图3-8(b)
转向逆时针
3)加速度分析:
图3-8(c)
转向顺时针。
题3-9在图a所示的牛头刨床机构中,h=800mm,h1=360mm,h2=120mm,lAB=200mm,lCD=960mm,lDE=160mm,设曲柄以等角速度ω1=5rad/s逆时针方向回转,试用图解法求机构在φ1=135°位置时,刨头上点C的速度Vc。
解:
选定比例尺,绘制机构运动简图。
(图3-9(a))
解法一:
速度分析:
先确定构件3的绝对瞬心P36,利用瞬心多边形,如图3-9(b)
由构件3、5、6组成的三角形中,瞬心P36、P35、P56必在一条直线上,由构件3、4、6组成的三角形中,瞬心P36、P34、P46也必在一条直线上,二直线的交点即为绝对瞬心P36。
速度方程
方向垂直AB。
VB3的方向垂直BG(BP36),VB3B2的方向平行BD。
速度多边形如图3-9(c)
速度方程
解法二:
确定构件3的绝对瞬心P36后,再确定有关瞬心P16、P12、P23、P13、P15,利用瞬心多边形,如图3-9(d)由构件1、2、3组成的三角形中,瞬心P12、P23、P13必在一条
 升级会员
升级会员 