计算机控制系统7教案Word格式文档下载.docx
《计算机控制系统7教案Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《计算机控制系统7教案Word格式文档下载.docx(67页珍藏版)》请在冰豆网上搜索。
0.
0T2T3T4T5T6T7T8T9T19T
�(b)
0T2T3T4T5T6T7T8T9T10T
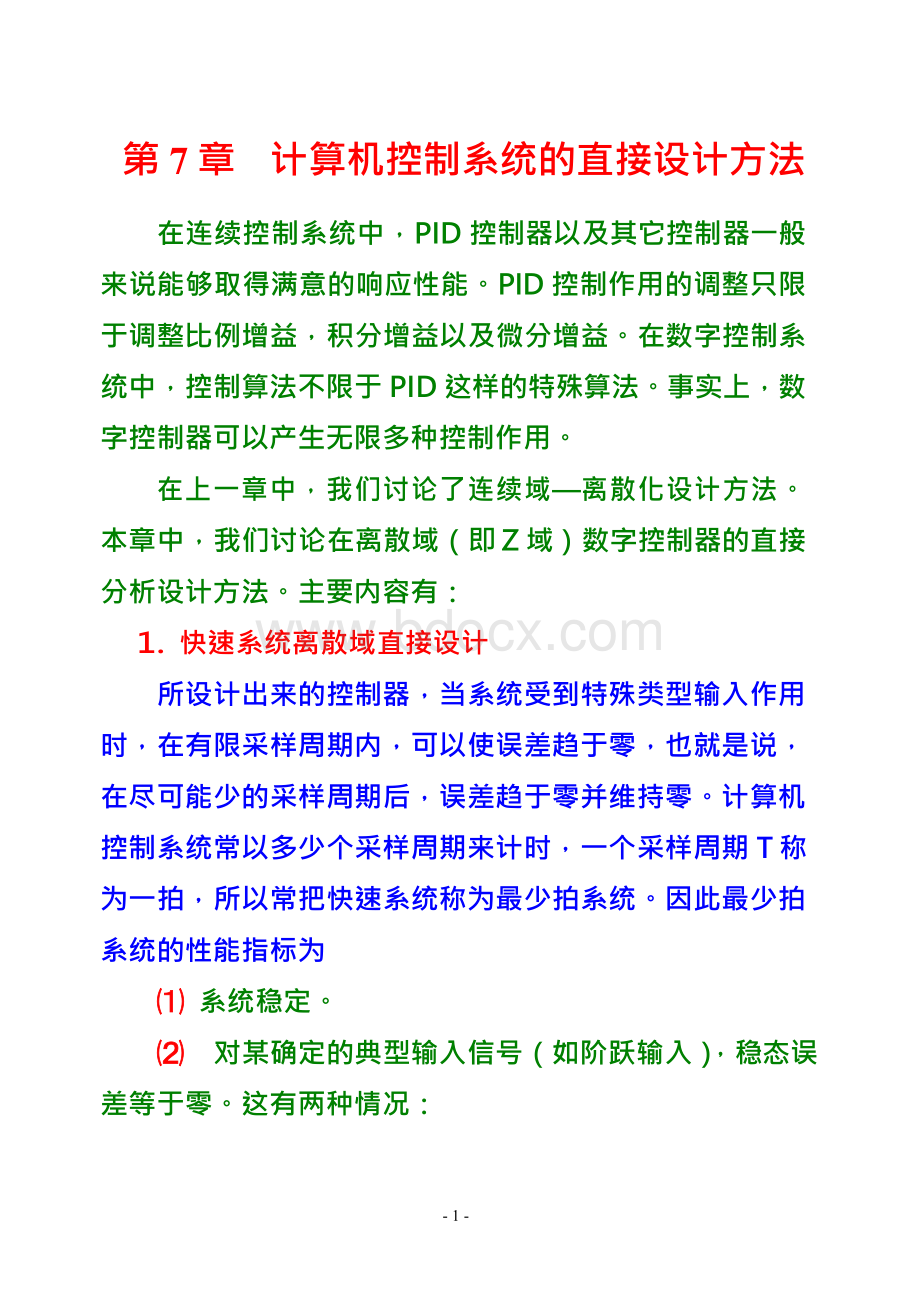
图7.1最少拍系统响应
(a)有纹波系统(b)无纹波系统
2.慢速系统离散域直接设计
所谓慢速系统一般是指被控对象具有大惯性、长滞后的性质。
值得说明的是,随着科学技术的发展,计算机控制系统离散域直接设计方法的研究发展迅速,新方法层出不穷。
相信计算机控制系统的直接设计方法会日渐成熟,得到广泛的应用。
7.1最少拍数字控制器设计方法
我们从最简单的系统设计开始。
本节介绍最少拍数字控制器设计方法是针对被控对象脉冲传递函数是稳定的,且输入信号为单位阶跃函数。
这种方法有直观的物理概念,计算相当简单,调整、反复计算容易。
根据数字控制器的输出序列中的第一个值,即控制量的初值u(0),是否人为地加以规定,分两种情况处理:
一是控制量的初值u(0)不加规定;
二是控制量的初值u(0)加以规定。
7.1.1控制量初值不加规定的最少拍数字控制器设计
参看图7.2。
图中,1-e-Ts为零阶保持器传递函数,
s
c*(s
R(s)+
E(s)
E*(s)
Te(kT)
U*(s)
u(kT)
T
-
C(s)
Gp(s)
D(z)
1-e-Tss
G(s)
)
图7.2数字控制系统
Gp(s)为被控对象传递函数,而G(s)=
�1-e-Tss
�Gp(s)称为广义被控
对象传递函数。
离散域直接设计方法就是首先将G(s)离散
化,写出它的脉冲传递函数G(z)=Z[G(s)],则由图7.2可以画出它的离散域等效框图如图7.3所示。
1.被控对象不含纯延迟环节
参看图7.3。
G(z)为被控对象的脉冲传递函数,D(z)为要设计的数字控制器脉冲传递函数。
R(z)+
E(z)
-e(kT)
U(z)
u(kT)
C(z)
c(kT)
G(z)
图7.3离散域等效系统框图
对于单位阶跃输入信号来说
(7.1)
�r(k)=1(k)=1,
�k=1,2,L
通常,Gp(s)连续函数中不含有延迟环节时,离散后,
G(z)的一般形式为
bz-1+bz-2+L+bz-n
n
G(z)=1 2 n =
�B(z-1)
(7.2)
�1+az-1+L+az-n
�A(z-1)
经过最少拍过渡时间之后,系统达到稳态,要求系统输出
(7.3)
�ì
c(k)=r(k)=1,
í
î
u(k)=u(n),
�k³
nk³
n
系统输入、输出以及控制量的Z变换为
(7.4)
�
R(z)=
�1
1-z-1
(7.5)
(7.6)
�C(z)=c
(1)z-1+c
(2)z-2+L+1[z-n+z-(n+1)+L]
U(z)=u(0)+u
(1)z-1+L+u(n)[z-n+z-(n+1)+L]
以上C(z)及U(z)的表达式说明,对于n阶系统来说,经n个采样周期后,系统的输出c(k)等于输入r(k),且等于1。
控制量u(k)经过n个采样周期后保持为常数。
用式(7.4)去除式(7.5)和式(7.6),得
F(z)=C(z)=jz-1+jz-2+L+jz-n
(7.7)
�R(z) 1 2 n
F(z)为系统闭环脉冲传递函数。
其中
j1=c
(1)
j2=c
(2)-c
(1)
M
jn=1-c(n-1)
Q(z)=U(z)=q
R(z) 0
+qz-1+q
2
z-2+L+q
�z-n
(7.8)
注意到
(7.9)
(7.10)
q0=u(0)
q1=u
(1)-u(0)
qn=u(n)-u(n-1)
j1+j2+L+jn=1
q1+q2+L+qn=u(n)
由图7.3可知,系统闭环脉冲传递函数为
(7.11)
�F(z)=C(z)=
R(z)
�D(z)G(z)
1+D(z)G(z)
解(7.11)方程,得出数字控制器脉冲传递函数
D(z)= 1
�F(z)
G(z)[1-F(z)]
(7.12)
由图7.3还可以求出
G(z)=C(z)
U(z)
(7.13)
另外,用式(7.8)去除式(7.7)
G(z)=C(z)=F(z)
U(z) Q(z)
(7.14)
那么(7.12)式所表示的数字控制器脉冲传递函数
Q(z)
�q+qz-1+L+qz-n
D(z)=
1-F(z)
�=0 1 n
1-jz-1-jz-2-L-jz-n
(7.15)
可以看出,只要求出j、
�1 2 n
q参数,就可以决定D(z)的参数。
由
式(7.14),已知G(z)参数,比较式(7.14)两边的系数,
即可求出j、
�q参数。
由式(7.2)
G(z)=1 2 n
1+az-1+L+az-n
-1 -2
�-n j1z-1+j2z-2+L+jn
=j1z
�+j2z
�+L+jnz
�= q0 q0 q0
q+qz-1+L+q
�z-n
�1+q1
q0
�z-1
��+q2
�z-2
�+L+qn
上式两边分子、分母z-1多项式各项系数分别相等,得出
q1=a1q0 j1=b1q0
q2=a2q0
M
j2=b2q0
qn=anq0
jn=bnq0
(7.16)
由式(7.9)
j1+j2+L+jn=b1q0+b2q0+L+bnq0=1
则
(7.17)
q0=
b1+b2
+L+bn
因此,使用简单的计算就求出了控制器的参数。
由(7.8)式可知,q0=u(0)为控制器输出的初值,它取决于被控对象
b参数之和。
b参数之和随着采样周期T的减小而减小,因而,当采样周期减小时,则控制变量初值u(0)增大。
将(7.16)式代入(7.15)式,得
�=0 1 n
q(1+az-1+L+a
�2
z-n)
�n
qA(z-1)
=
0 1 n
�=0
1-q(bz1+bz-2+L+bz-n) 1-qB(z-1)
(7.18)
�0 1 2 n 0
为了说明问题,我们将式(7.2)G(z)表达式重新写出
1+az-1+L+az-n
由式(7.11)可以看出,系统闭环脉冲传递函数F(z)的表
达式中D(z)、G(z)成对出现,D(z)的分子中含有A(z-1),补偿
G(z)的分母A(z-1)。
这样完全补偿,是假定被控对象脉冲传
递函数的所有极点都位于单位圆内部。
因此,这种最少拍数字控制器只能用于稳定的对象。
F(z)
�=C(z)=jzR(z) 1
-1+jz
-2+
�L+jnz
�-n=jzn-1+L+j
1 n
zn
�=q0B(z)
(7.19)
特征方程
(7.20)
1+D(z)G(z)=zn
=0
因此,控制系统在Z平面上有n重z=0的极点,初始偏差出现以后,经n个采样周期,控制系统进入稳态。
如果D(z)补偿G(z)不准确,则只有当k®
¥
时,系统才能进入稳态。
2.被控对象具有延迟的性质
对于具有延迟性质的被控对象,其传递函数可以写成如下形式:
bz-1+b
�z-2+L+b
�z-n -d
�B(z-1) -d
G(z)=1 2 n ×
z = ×
z
1+az-1+L+a
(7.21)
式中d为延迟拍数。
要求系统性能达到
ì
c(k)=r(k),
u(k)=u(
 升级会员
升级会员 