六自由度运动平台设计方案Word文件下载.doc
《六自由度运动平台设计方案Word文件下载.doc》由会员分享,可在线阅读,更多相关《六自由度运动平台设计方案Word文件下载.doc(18页珍藏版)》请在冰豆网上搜索。
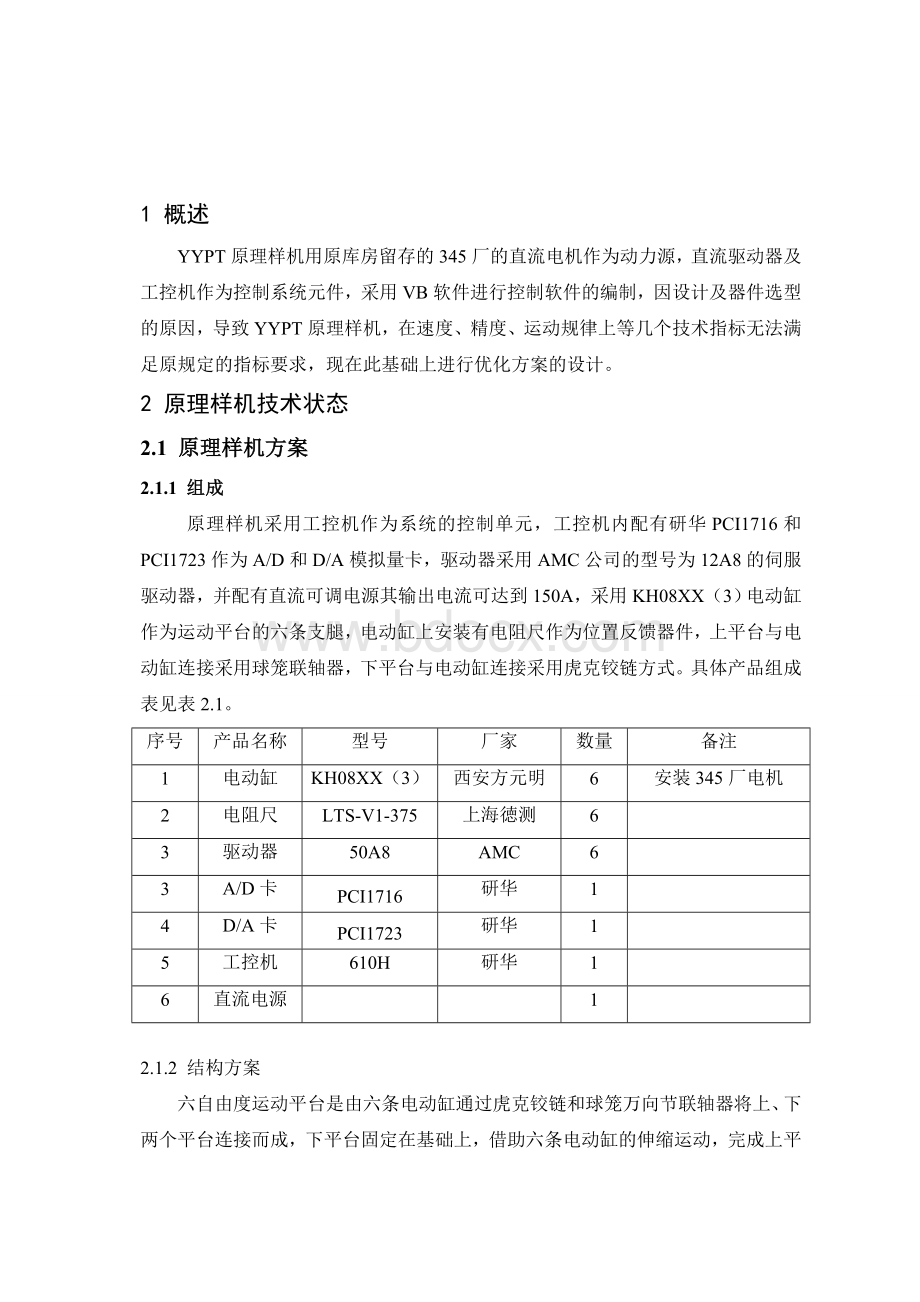
上海徳测
3
驱动器
50A8
AMC
A/D卡
PCI1716
研华
4
D/A卡
PCI1723
5
工控机
610H
直流电源
1
2.1.2结构方案
六自由度运动平台是由六条电动缸通过虎克铰链和球笼万向节联轴器将上、下两个平台连接而成,下平台固定在基础上,借助六条电动缸的伸缩运动,完成上平台在三维空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
下静平台
虎克铰链
上动平台
球笼联轴器
图1六自由度平台外形图
a)球笼联轴器(如图2所示)
采用球笼铰链与上平面连接。
球笼铰链结构简单、体积小、运转灵活、易于维护。
初选球笼铰链型号BJB(JB/T6139-1992),公称转矩Tn=2000N/m,工作角度40度,外径D=68mm,轴孔选用圆柱孔d=24mm,总长度L1=148mm,转动惯量为0.00008kg.m²
,重量5kg。
图2球笼联轴器
b)虎克铰链(如图3所示)
采用虎克铰链与下平面连接。
万向节铰链传动效率高,允许两轴间的角位移大,适用于有大角位移的两轴之间的连接,一般两轴的轴间角最大可达35º
~45º
,噪音小,对润滑要求不高,传递转矩大,而且使用可靠,因此获得广泛的应用。
图3虎克铰链
下固定板的连接(如图4所示)
图4电动缸齿轮盖
下固定板与电动缸用法兰连接。
初选深沟球轴承型号61808(GB/T276-1994),额定载荷Cr=5.1kN,外径D=52mm,轴承孔选用d=40mm,宽B=7mm,重量0.26kg。
初选深沟球轴承型号61802(GB/T276-1994),额定载荷Cr=2.1kN,外径D=24mm,轴承孔选用d=15mm,宽B=5mm,重量0.005kg。
上下结构(如图5所示)
上铰点分布圆的半径:
Ra=432mm
下铰点分布圆的半径:
Rb=625mm
上铰相邻铰之间的距离:
da=105mm
图5
下铰相邻铰之间的距离:
db=120mm
零位时作动器的长度:
L2=777mm
c)电动缸
基于器部件复用的考虑,YYPT采用某项目3号电动作为运动平台动作执行终端,并可利用库存的六台DC24V直流有刷减速电机为之配套。
电动缸主要技术指标:
1)最大推拉力不小于6000N;
2)行走速度:
18mm/s;
3)最大行程:
370mm;
4)电动缸不自锁;
直流有刷减速电机技术指标:
1)电压范围:
允许在20VDC~28VDC范围内工作;
2)额定电压:
24VDC;
3)最大电流:
在额定电压24VDC,额定负载12Nm条件下,电流≤40A。
4)最低转速:
在额定电压24VDC,额定负载12Nm条件下,减速器输出转速不小于410rpm;
5)额定负载:
减速电机额定负载转矩为12Nm;
6)工作方式:
连续工作时间3min,间隙时间5min;
7)电气接口:
接口方式采用航空插座,航空插座型号:
XCE22F4K1D1,电机出线与插座接线关系为“﹢”接1号针脚,“-”接2号针脚。
2.1.3控制方案
控制软件采用位置反解算法,即通过平台的姿态反算六支电动缸的长度,通过PCI-1716接收电阻尺反馈的位置指令,根据计算出来的长度和反馈指令通过PCI-1723向驱动器发送模拟量速度指令,控制电动缸运动到指定长度。
2.2原理样机技术参数
序号
指标
实际情况
载荷
1T
未进行试验测试
平移速度
10mm/s~15mm/s
旋转速度
1.5°
/s
X,Y轴平移范围
±
300mm
Z轴平移范围
160mm
X,Y轴转动范围
20°
7
Z轴转动范围
30°
2.3原理样机存在问题
1、超调问题:
电动缸运行到位后超调现象比较严重,初步分析为电机特性较差引起的,但不排除算法及PID参数存在问题;
2、台体结构晃动:
当电动缸处于停止运动后,上台面人为晃动存在时,存在较大晃动量,初步分析原因为上平台使用的球笼联轴器间隙过大造成的。
3优化方案
针对原理样机中出现的问题,在尽量少修改原理样机结构的基础上对其进行优化,使其性能得到提高,并能完成六自由度的摇摆及联动等动作。
3.1伺服系统优化
针对原电机超调现象严重的现状,选择带反馈的伺服电机,使其和配套伺服驱动器构成小闭环,以降低上位控制软件的控制算法的难度。
按照现有结构允许的安装空间只能选择外径在70mm以内的伺服电机及减速器,初选松下MHMD042G1V功率为400W的交流伺服电机作为动力源。
按照电机输出扭矩需要,选择纽士达特型号为PF60-4的减速器,其外径为60mm*60mm,效率为90%。
则电机加减速器的输出扭矩为4.68N.m,转速为750rpm,丝杠导程为6mm,传动箱减速比为2,则电动缸的速度为37.5mm/s,推力不小于600kg满足设计及使用要求。
3.2控制系统优化
根据原理样机中模拟量信号受干扰严重的现象,结合本次设计所选择伺服系统,采用脉冲+方向指令作为控制指令,故需要选择运动控制卡,根据公司现在使用的运动卡,选择深圳众为兴公司型号为ADT-856的运动控制卡作为主控卡。
3.3结构部分优化
根据原理样机存在的问题,现将运动平台上平台与电缸连接部分也更改为虎克铰链,用以消除球笼联轴器带来的间隙。
虎克铰链示意图如图3.1所示:
图3.1虎克铰链示意图
4系统组成
六自由度运动平台系统由测试软件部分系统、电气控制系统、动力电源系统、运动平台机械台体组成。
运动平台部分的组成结构示意图如图4.1所示。
图4.1系统组成框图
软件部分主要包括用户界面程序、伺服算法程序、PID参数设置程序等。
用户界面程序采用VB或VC编写,界面友好,使用方便,可以接收用户的鼠标和键盘输入,设置工作的模式,运动的曲线类型等(正弦、连续、圆弧等),可以接收外部的指令,使平台在跟随状态下运行。
电控部分的作用是接收控制系统输出的指令数据,并将其传输给伺服驱动器,驱动器将信号放大后控制电机运动,进而带动电动缸运动,并最终使台体实现各种姿态。
包括工控机、运动控制卡、伺服驱动器、伺服电机、电阻尺及相关电器元件等。
机械部分用于支撑负载,包括上平台、上连接铰、下连接铰、电动缸、支撑架、底座等。
平台由电动缸驱动,进行横滚、偏航、俯仰三个姿态和X、Y、Z平移共六个自由度的运动。
5方案设计
根据研究计划制定的研究目标及为下一个研究课题进行技术储备,本次设计出了满足原速度载荷要求的同时,在不增加外购件的前提下,进行了高速状态的设计,即传动箱内的齿轮可不带减速器直接连接伺服电机,使电动缸可以高速运动,但此时载荷降低,用以进行六自由度运动平台高速状态的研究。
5.1机械结构设计
本次结构设计在YYPT原理样机基础上进行设计,对原理样机中发现的问题进行优化,同时因为伺服系统更换导致相关结构部分进行更改。
主要更改部分有上平台与电动缸连接方式,电动缸传动箱,电动缸电机端传动齿轮。
5.1.1上平台与电动缸连接方式
原理样机上平台与电动缸连接采用球笼轴承,初样机采用虎克铰链方式进行连接,其更改后的外形图如图5.1所示:
图5.1上平台链接部分外形图
5.1.2电动缸传动箱
本次设计选用PF60-4减速器,其减速器输出接口与原减速器相比有更改部分,主要更改部分为连接螺钉分布圆由直径77mm变为直径70mm,止口由直径30mm变为40mm,其他部分没有变化。
5.1.3电机齿轮
本次设计选用PF60-4减速器,其输出轴直径为14mm小于原减速器输出轴直径18mm,同时考虑与减速器及伺服电机能够连接的共用性,所以需要对电机齿轮重新设计加工。
5.1.4减速器
根据选取电机设计需要,减速器选择山东纽士达特公司生产的PF60-4行星减速器,其主要性能参数如表5.1:
表5.1减速器性能参数
名称
参数
额定输出扭矩
44N.m
最大径向力
265N
最大轴向力
220N
抗扭刚性
1.8N.m/arcmin
额定输入转速
4000rpm
最大输入转速
8000rpm
回程间隙
小于18arcmin
5.2电控系统设计
电控系统主要用于接收用户控制指令,并处理各种反馈信号,产生控制信号,控制伺服作动器做功,最终驱动运动平台完成各种自由度的运动。
本次设计仍采用位置反解算法,通过平台位置计算出各支电动缸的长度,采用运动控制卡作为运动平台的指令发送器件,根据计算出的结果发送6通道的脉冲+方向指令,用以控制6支电动缸进行运动;
将伺服电机尾端的编码器数据通过伺服驱动器发送至上位机,通过解算编码器数据可知电动缸当前位置,电阻尺作为电动缸绝对位置检测,用以进行电动缸行程判读,作为电气限位保护使用。
其控制框图如图5.2所示:
图5.2控制框图
主要控制元器件进行详细介绍:
5.2.1伺服电机
根据KH08XX(3)缸设计技术书可知,600kg推力时丝杠需要扭矩为5.732N.m,缸体部份及齿轮传动部分总效率按照70%计算时,齿轮传动部分减速比为2,减速器输出扭矩为4.1N.m。
初步选配减速比为4,效率为90%的减速器,则电机端需要转矩,选择松下型号为MHMD042G1V的伺服电机,其主要参数见表5.2:
表5.2电机性能参数
名称
电压
220VAC
额定转速
3000rpm
最大转速
5000rpm
额定扭矩
1.3N.m
瞬时最大扭矩
3.8N.m
制动力矩
不小于1.27N.m
编码器
20位增量式
其转矩特性图如图5.3所示:
图5.3伺服电机转矩特性图
5.2.2伺服驱动器
根据所选电机,配伺服驱动器型号为MBDHT2510,其主要性能参数见表5.3:
表5.3伺服驱动器性能参数
220VAC±
10%50/60Hz
控制方式
位置控制模式
速度控制模式
转矩控制模式
全闭环控制模式
指令输入
差分输入(脉冲+方向、脉冲+脉冲)
输入频率
500k(光电耦合器输入使用时)
4M(长线驱动器输入使用时)
电子齿轮比
1/1000~1000以内
通讯功能
RS232、RS485、US
 升级会员
升级会员 