实验五控制系统的 pid 校正器设计实验.docx
《实验五控制系统的 pid 校正器设计实验.docx》由会员分享,可在线阅读,更多相关《实验五控制系统的 pid 校正器设计实验.docx(49页珍藏版)》请在冰豆网上搜索。
实验五控制系统的pid校正器设计实验
实验五控制系统的PID校正器设计实验
一、实验目的
1.了解PID校正器的数学模型。
2.学习PID校正的原理及参数整定方法。
3.学习在Simulink中建立PID控制器系统的模型并进行仿真。
二、相关知识
PID控制器(ProportionIntegrationDifferentiation,比例积分微分控制器)作
为最早实用化的控制器已有70多年的历史,是目前工业控制中应用最广泛的控
制器。
PID控制器由于其结构简单实用,且使用中无需精确的系统模型等优点,
因此,95%以上的现代工业过程控制中仍然采用PID结构。
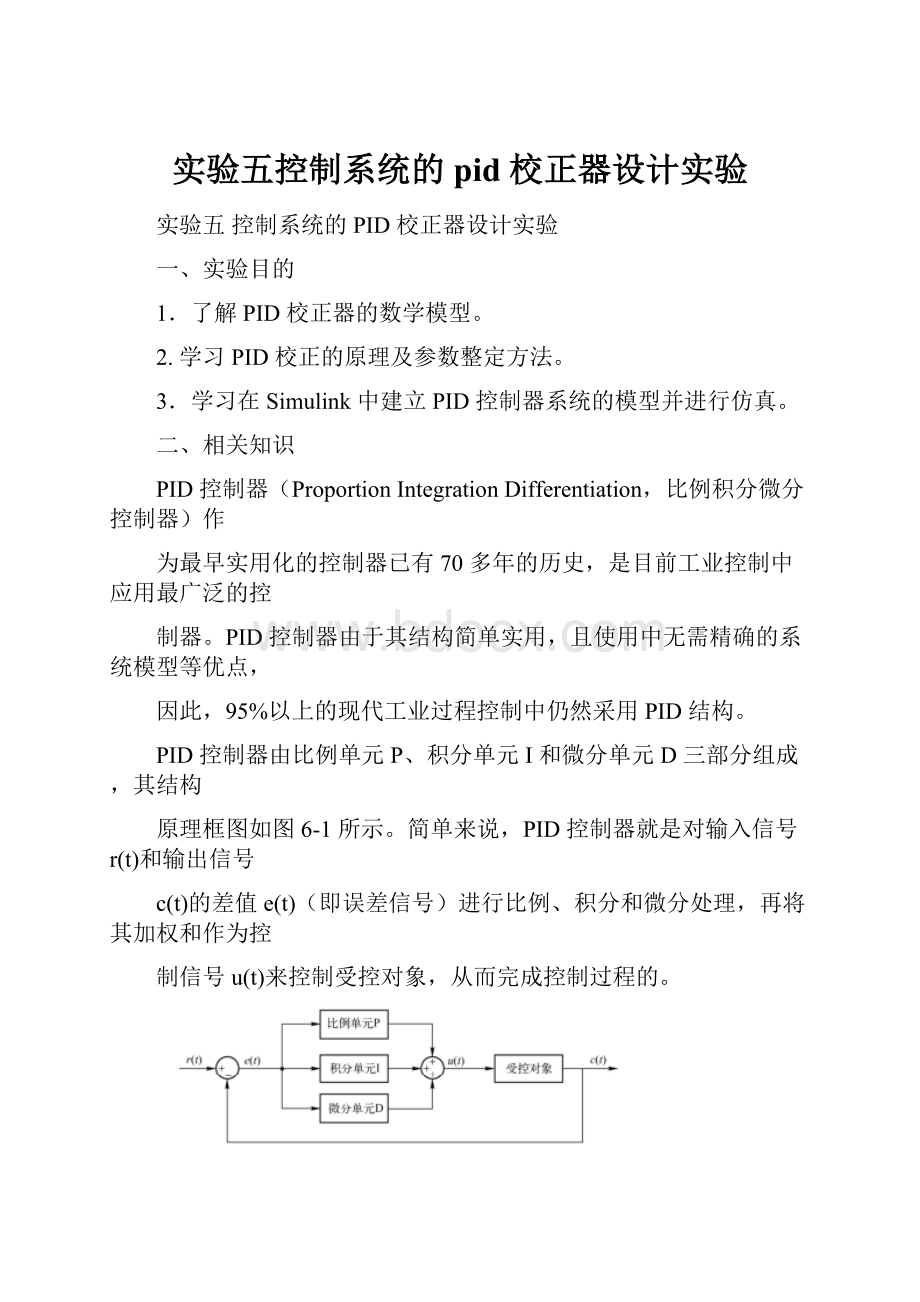
PID控制器由比例单元P、积分单元I和微分单元D三部分组成,其结构
原理框图如图6-1所示。
简单来说,PID控制器就是对输入信号r(t)和输出信号
c(t)的差值e(t)(即误差信号)进行比例、积分和微分处理,再将其加权和作为控
制信号u(t)来控制受控对象,从而完成控制过程的。
图1.8PID控制器结构原理框图
PID控制器可用公式(1-1)描述。
式中,KP、KI和KD分别为比例、积分和微分系数;TI和TD分别为积分
和微分时间。
一个PID控制器的设计重点在于设定KP、KI和KD三个参数的值。
实际使
用时,不一定三个单元都具备,也可以只选取其中的一个或两个单元组成控制器。
1.比例控制器P
比例控制是最简单的控制方法之一。
比例控制器的输出与输入误差信号成比
31
例关系,其传递函数如公式(1-2)所示。
式中,KP为比例系数(增益),其值可正可负。
比例控制只改变系统增益,
不影响相位。
仅采用比例控制时系统输出存在稳态误差。
增大KP可以提高系统
开环增益,减小系统稳态误差,但是会降低系统稳定性,甚至可能造成闭环系统
的不稳定。
2.积分控制器I
积分控制器的传递函数如公式(1-3)所示。
式中,KI为积分系数。
积分控制器的主要作用是消除系统的稳态误差。
但是,
积分单元的引入会带来相位滞后,为系统的稳定性带来不良影响,设置积分控制
器可能造成系统不稳定。
因此,积分控制单元一般不单独作为控制器使用,而是
结合比例单元P和微分单元D组成PI或PID控制器使用。
3.比例积分控制器PI
加入了比例单元和积分单元后的控制器称为比例积分控制器,即PI控制器,
其传递函数如公式(1-4)所示。
式中,KP和KI分别为比例系数和积分系数;TI为积分时间。
PI控制器兼具
比例控制器和积分控制器的优点,因此,工程中常用来改善系统稳态性能,减小
或消除稳态误差。
4.比例微分控制器PD
加入了比例单元和微分单元后的控制器称为比例微分控制器,即PD控制器,
其传递函数如公式(1-5)所示。
式中,KP和KD分别为比例系数和微分系数;TD为微分时间。
微分单元可以
对系统误差的变化进行超前的预测,从而避免被控系统的超调量过大,同时减小
32
系统的响应时间。
微分单元可以反映误差的变化率,只有误差随时间变化时,微
分控制才会起作用,而处理无变化或者变化缓慢的对象时不起作用。
因此,微分
单元D不能与被控系统单独串联使用,而是结合比例单元P和积分单元I组成
PD或PID控制器使用。
5.比例积分微分控制器PID
同时兼具比例单元、积分单元和微分单元的控制器称为比例积分微分控制
器,即PID控制器,其传递函数如公式(1-6)所示。
式中,KP、KI和KD分别为比例、积分和微分系数;TI和TD分别为积分和
微分时间。
PID控制器兼有PI控制器和PD控制器的优点,既可以减小系统稳态
误差,加快响应速度,又可以减小超调量。
实际工程中,PID控制器被广泛应用。
6.PID控制器的Ziegler-Nichols参数整定法
PID控制器的参数整定是指确定PID控制器的比例系数KP、积分时间TI和
微分时间TD,是PID控制器设计的核心内容。
PID控制器参数整定方法主要分
为理论计算法和工程整定法。
理论计算法是根据系统数学模型,通过理论计算确
定控制器参数。
工程整定法是按照工程经验公式确定控制器参数,主要有
Ziegler-Nichols整定法、临界振荡法、衰减曲线法和凑试法。
工程整定法与理论
计算法相比优点是无需知道系统的数学模型,可以直接对系统进行现场整定,方
法简单,容易掌握。
需要注意的是,无论采取上述哪种方法整定PID控制器参
数,都需要在系统实际运行中进行最后的调整和完善。
下面介绍Ziegler-Nichols整定法。
Ziegler-Nichols整定法只对被控对象的单位阶跃响应曲线为“S”型曲线的系
统才可用,如图1.9所示,否则不适用。
式中,K为放大系数,L为延迟时间,T为
图1.9“S”型响应曲线示意图
33
时间常数。
通过Ziegler-Nichols整定法确定PID控制器中比例系数KP、积分时间TI和
微分时间TD值的步骤如下:
1)首先,获取开环系统的单位阶跃响应曲线,判断系统是否适用
Ziegler-Nichols整定法。
2)按照图1.9所示的“S”型响应曲线参数求法,确定K、L和T的值。
3)根据表1.5确定所需的P、PI或PID控制器中各个参数的值。
表1.5Ziegler-Nichols整定法控制器参数的经验公式
三、实验内容及要求
1.[例5.1]某控制系统如图1.10所示,其中
在控制单元
施加比例控制,并且采用不同的比例系数KP=0.1,0.5,1,2,5,10,观察各比
例系数下系统的单位阶跃响应及控制效果。
图1.10系统结构图
解:
在MATLAB中完成如下程序。
Kp=[0.1,0.5,1,2,5,10];
Go=tf(1,conv(conv([1,1],[2,1]),[3,1]));%系统开环传递函数
fori=1:
6
G=feedback(Go.*Kp(i),1);%不同比例系数下的系统闭环传递函数
step(G);holdon;%求系统的单位阶跃响应
end
gtext('Kp=0.1');gtext('Kp=0.5');gtext('Kp=1');%放置Kp值的文字注释
gtext('Kp=2');gtext('Kp=5');gtext('Kp=10');
运行程序得到不同比例系数下的系统单位阶跃响应曲线,如图1.11所示。
图1.11例5.1不同比例系数下系统单位阶跃响应图
分析:
从图1.11中可以看出,随着比例系数KP值的增大,系统的响应速度加快,
稳态误差减小,超调量却在增加,调节时间变长,而且随着KP值增大到一定程
度,系统最终会变得不稳定。
2.[例5.2]某控制系统如图1.10所示,其中
,在控制单元施加
比例积分控制,比例系数KP为2,积分时间的值分别取TI=10,5,2,1,0.5,
观察各积分时间下系统的单位阶跃响应及控制效果。
解:
在MATLAB中完成如下程序。
Kp=2;
Ti=[10,5,2,1,0.5];
Go=tf(1,conv([4,1],[1,1]));%系统开环传递函数
fori=1:
5
Gc=tf([Kp*Ti(i),1],[Ti(i),0]);%PI控制器函数
G=Go*Gc;%PI校正后系统开环传递函数
step(feedback(G,1));%PI校正后系统单位阶跃响应
holdon;
end
gtext('Ti=10');gtext('Ti=5');%添加注释
gtext('Ti=2');gtext('Ti=1');gtext('Ti=0.5');
运行程序,得到如图1.12所示的单位阶跃响应图。
分析:
从图1.12中可以看出,加入PI控制后,系统的稳态误差被减小为0,TI=2
时的控制效果最佳。
但是,随着TI值的减小,系统的超调量加大,如果继续减
小TI值,最后势必会使系统出现震荡。
图1.12例5.2加PI控制后在不同TI值下系统的单位阶跃响应图
3.某控制系统如图1.10所示,其中
,在控制单元施加比例微
分控制,比例系数KP为2,微分时间的值分别取TD=0,0.1,0.5,1,2,在MATLAB
中编程建立系统模型,观察各微分时间下系统的单位阶跃响应及控制效果。
Kp=2;
Td=[0,0.5,1,2];
Go=tf(1,conv([4,1],[1,0]));%原系统开环传递函数
fori=1∶4
G=tf([Kp*Td(i),Kp],conv([4,1],[1,0]));%PD校正后系统开环传递函数
step(feedback(G,1));%PD校正后系统单位阶跃响应
holdon;
end
gtext('Td=0');gtext('Td=0.5');%添加注释
gtext('Td=1');gtext('Td=2');
运行程序,得到如下图所示的单位阶跃响应图。
从图中可以看出,没有微分控制
时(TD=0)系统的超调量最大,响应时间最长,而加入PD控制后,随着TD值的
增加,系统的超调量在减小,系统的响应时间也在变小。
TD=2时系统的稳定性最
好,响应时间最快。
实验3中加PD控制后在不同TD值下系统的单位阶跃响应图
4.某控制系统如图1.10所示,其中
,在控制单元施加PID
控制器,比例系数的值取KP=200,积分系数的值取KI=350,微分系数的值取
KD=8,在Simulink中建立系统模型,观察施加PID控制器前后系统的单位阶跃
响应,并分析控制效果。
Simulink中加入PID控制器前和加入PID控制器后的系统模型分别如下图所示:
注意:
1.为了能看清示波器输出的单位阶跃响应曲线,可以将仿真时间设置为2;
2.还要注意把阶跃信号源的参数修改为从时刻0开始输出幅值1而非时刻1。
然后运行仿真,查看示波器中加入PID控制器前和加入PID控制器后的单
位阶跃响应,波形如下:
实验4Simulink中加入PID控制前后系统的单位阶跃响应图
MATLAB程序如下:
num=1;den=[1,8,24];
Go=tf(num,den);%原开环函数
Kp=200;Ki=350;Kd=8;%PID参数
Gc=tf([Kd,Kp,Ki],[1,0]);%PID控制器函数
G_PID=Gc*Go;%加入PID控制后的开环函数
figure
(1);step(feedback(Go,1));title('施加PID控制器前');
figure
(2);step(feedback(G_PID,1));title('施加PID控制器后');
运行程序,得到如下图所示的单位阶跃响应图。
实验4MATLAB中加入PID控制前后系统的单位阶跃响应图
分析:
从加入PID控制前后系统的单位阶跃响应图中可以看出,没有施加PID
控制器时系统存在很大的稳态误差,而加入PID控制器后,系统的稳态误差减
小为0,系统的超调量和响应时间都比较小。
5.已知一个系统的开环传递函数为
,试采用Ziegler-Nichols
整定法计算系统P、PI和PID控制器的参数,并绘制整定后系统的单位阶跃响应
曲线。
:
首先,利用Simulink建立如图1.13所示的系统模型。
图1.13实验5中的系统Simulink模型
然后,绘制开环系统的单位阶跃响应曲线。
需要断开系统中的反馈连线、积
分器“Integrator”和微分器“Derivative”的输出连线,并将“KP”置为1,选定
合适的仿真时间,运行仿真,运行结束后双击示波器“Scope”,就可以查看仿真
得到的单位阶跃响应曲线图,如图1.14所示。
图1.14开环系统单位阶跃响应曲线
按照图1.14所示的“S”型响应曲线参数求法,可以得到参数K、L和T的值:
K=8,L=10,T=40
(注意:
以上三个值为参考值,跟这三个值差别不大的值均可认为符合要求,只要
最后求得的控制器单位阶跃响应曲线效果良好即可)
如果从示波器输出曲线图不容易直接确定这3个参数的值,那么可以将输出数据
导入到MATLAB工作空间中,然后通过编程求取这3个参数的值。
再根据表1.5可以分别计算得到系统P控制、PI控制和PID控制时的参数:
P控制器:
KP=0.5;
PI控制器:
KP=0.45,TI=30;
PID控制器:
KP=0.6,TI=20,TD=5。
最后,修改Simulink系统模型的参数及连线使其分别满足P控制、PI控制和PID
控制,并运行仿真,查看示波器“Scope”中的单位阶跃响应曲线,如下图所示。
四、实验报告
1.运行实验1给出的例5.1程序,查看运行结果,并对比例系数KP取不同
值时的系统响应结果进行分析。
2.运行实验2给出的例5.2程序,查看运行结果,并对积分时间TI取不同
值时的系统响应结果进行分析。
3.用MATLAB程序实现实验3的内容,分别查看其单位阶跃响应结果,
并分析不同参数下的控制结果。
4.在Simulink中建模实现实验4的内容,分别查看其单位阶跃响应结果,
并分析不同参数下的控制结果。
5.根据提示在Simulink中建模实现实验5的内容,得到系统P控制、PI
控制和PID控制时的参数,修改Simulink系统模型的参数及连线使其分别满足P
控制、PI控制和PID控制,分别查看示波器“Scope”中的单位阶跃响应曲线,
并分析比较P控制、PI控制和PID控制的效果。
五、实验思考
尝试对PID控制器P、I、D每个单元的作用和特点进行总结。
比例单元P:
相当于引入一个增益来放大误差信号的幅值,从而加快控制系统的
响应速度。
增益值越大,系统的响应速度越快,但是系统的超调量也随之增加,
系统到达稳定状态的调节时间加长,甚至可能导致系统的不稳定。
积分单元I:
可以消除系统稳态误差,同时引入了相位滞后。
但是积分单元的引
入相当于在系统中加入了极点,会对瞬时响应造成不良影响,甚至导致系统不稳
定。
微分单元D:
起到了对误差变化进行预见性控制的作用。
能够预测误差信号的变
化趋势,在误差到达零之前,提前使抑制误差的控制作用为零,从而避免被控量
严重超调,加快系统响应,减少调节时间。
微分单元对惯性较大或滞后的系统控
制效果较好,但是,由于其“超前”的控制特点,对纯滞后系统不能完成控制,
而且容易引入高频信号噪声。
六,实验截图
实验五截图
毕业设计(论文)管理规定
及相关表格汇编
本科生毕业设计(论文)管理规定……………………1
毕业论文(设计)工作实施细则(草案)……………2
优秀毕业论文评选办法………………………………7
毕业论文的写作与排版规范…………………………10
毕业设计(论文)写作模板…………………………14
毕业设计(论文)答辩提问记录表………………21
毕业设计第周工作总结……………………22
毕业设计(论文)过程跟踪表……………………23
毕业设计(论文)课题申请表………………………24
毕业设计(论文)任务书…………………………25
毕业设计(论文)开题报告…………………………26
毕业设计工作中期检查Ⅰ…………………………27
毕业设计工作中期检查Ⅱ……………………………28
大学
本科生毕业设计(论文)管理规定
为提高本科生毕业设计(论文)质量,加强毕业生毕业设计管理工作,特制定如下规定:
本科毕业设计工作从第七学期(四年级第一学期)考试周前,完成教师选题、师生见面及指导教师向学生下达任务书(见附表一)。
毕业设计从第八学期开学正式开始,十六周内完成。
毕业设计开始时,教师必须填写毕业设计课题申请表、并由系汇总后交院毕业设计领导小组审核。
(见附表)。
指导教师必须定期对学生辅导(每周至少两次),并将确定的周辅导时间上报教学办,教学办将定期和不定期进行检查。
指导教师自行组织学生的开题报告,并填写开题报告表(见附表二)
加强中期的监督与检查,第一次检查时间定在第五周,检查内容含学生资料阅读,方案论证情况。
第二次检查定在第十周,形式为:
由指导教师组织,院毕业设计领导小组成员旁听,学生口头汇报。
主要检查学生的阶段性结果。
两次检查学生均应填写中期检查报告表格(见附表三、四),指导教师或系对检查情况写出书面评语。
学生需上交一篇与本专业有关不少于5000字的外文文章翻译,并将原文和译文用A4打印加自设计封皮一起装订成册。
论文答辩前,指导教师必须给出评语及评分,然后由各系主任指定其他评阅人对论文进行评阅及评分(请参考毕业论文书面成绩评分表规定的评分标准评分)。
论文答辩由各系组织,并成立答辩委员会对所有学生论文进行答辩。
答辩必须给出答辩委员会意见及评分并填写相应表格。
答辩委员会成员必须按评分表中各项指标标准进行评分,然后由各成员给出的分数计算出得分。
毕业设计(论文)最终成绩计算:
指导教师评分x30%+评阅人评分x30%+答辩委员会评分x40%=总分
10.毕业设计(论文)提交的文档及装订要求
毕业论文一份(包含封皮、目录、中英文摘要、内容及参考文献)
不少于5000汉字的科技翻译资料一份(并将原文和译文用A4打印加自设计封皮一起装订成册)
毕业论文简介(A4纸打印1~2页)(包含题目、专业、年级、姓名、指导教师、毕业论文所做的工作、解决的问题、创新之处等)
毕业设计任务书(加在毕业论文目录之前和毕业论文一起装订,)
开题报告(加在毕业论文目录之前和毕业论文一起装订,)
毕业设计工作中期检查表Ⅰ、Ⅱ
注(4)(5)(6)加在毕业论文目录之前和毕业论文一起装订。
11.毕业设计(论文)随正式论文一律附交电子文档(光盘或软盘)。
被推荐参加学校优秀毕业设计(论文)3%评选的,还要另附(符合发表格式要求的)修改为5000字左右的电子文档。
2005年12月修订
大学
毕业设计(论文)工作实施细则(试行)
根据《毕业设计(论文)工作暂行规定》,为了进一步规范毕业设计(论文)工作的各个环节,结合我院实际情况,经院教学指导委员会讨论,院长办公联席会议通过,对我院毕业设计(论文)工作特制订以下实施细则。
一、指导教师资格
毕业设计(论文)的指导教师原则上应由各专业具有中级(含中级)以上专业技术职务的教师担任。
也可以聘任具有相应职称、学术水平高的工程技术人员担任。
指导教师名单由各系系主任核定,报分管教学的副院长批准后实施。
二、课题的命题过程
1.命题的基本原则是:
(1)目标原则:
命题必须符合专业培养目标,具有一定的深度、广度与新颖性,能使学生得到比较全面的训练。
(2)价值原则:
命题应具有一定的学术研究或应用开发价值,尽可能做到理论与实际相结合,体现学科的发展性与应用性。
(3)能力原则:
命题的难度应考虑学生完成命题的条件与能力,因材施教。
(4)兴趣原则:
应考虑学生对命题的兴趣与探索研究的积极性。
(5)多样化原则:
命题应注意题目的不断更新与类型的多样化,同一指导教师的设计(论文)课题选题和近三届毕业设计课题的重复率不高于50%,题目数量应满足一人一题的基本要求。
2.课题的审核
由各专业指导教师确定后的课题,填写《毕业设计课题申请表》。
经系主任汇总后,报院毕业设计领导小组审核,由分管教学的副院长批准。
3.确定课题的时间要求
一般在第七学期第15周前完成命题,对于经批准认可的命题,在第16周内向学生公布。
指导教师在实际指导过程中,一般不应随意更改命题,确实需要更改命题时,应办理相关手续。
三、选题与任务书
1.学生在教师指导下从公布的命题范围内选题。
2.学生自拟题目须经系主任审阅后指定指导教师,并报分管教学副院长批准。
3.选题原则上要求一人一题。
4.学生选题一般在第七学期的第17周前完成。
5.根据学生选题情况,填写《大学毕业论文(设计)任务书》,其中“设计所需的工作条件”应与课题的实际需要相符;“设计(论文)任务及目标”应指明毕业设计的详细任务(所需完成的工作、达到的设计要求等),不能简单了事。
四、开题
1.指导学生书写开题报告,开题报告主要内容包括:
课题研究的意义和背景、课题研究相关资料的研究情况(说明课题研究的历史、现状和发展趋势)、对课题研究的基本构思。
2.指导学生填写《大学毕业论文(设计)开题报告》,并要求学生在第八学期的第2周前提交不少于1000字的开题报告,基本内容应包括课题研究的意义和背景、课题研究相关资料的研究情况(说明课题研究的历史、现状和发展趋势)、对课题研究的基本构思、阶段性工作计划、参考文献等。
参考文献的列写格式要符合要求。
3.第八学期的第3周前完成开题审核,通过开题审核的学生,一般不应更换选题;开题未获通过的学生,应及时根据开题指导小组的意见更换选题,并于开题后的2周内做好准备,向开题指导小组第二次提出开题申请;对再次开题未获通过的学生,取消其本次毕业设计(论文)资格,延至下届进行。
指导教师要重视对开题未获通过的学生进行指导。
4.开题报告中,“指导教师意见”应对学生开题情况作出基本评价以及对学生毕业设计(论文)研究方案或毕业设计(论文)写作提纲提出改进意见,同时还应对学生是否可以进入研究和设计(论文)撰写阶段提出意见。
开题意见应对选题及设计方案的合理性、可行性作出简单评价,并明确表示是否同意开题,不能只简单写“同意开题”及类似意见。
五、过程指导
1.指导教师确定以后,不得随意更换。
指导教师因各种原因确实不能或不宜进行毕业设计(论文)指导时,必须办理有关手续,并由所在系指定水平相当的教师指导。
2.每名教师指导的学生人数一般限定在8名以内。
3.指导教师应指导学生制订毕业设计(论文)工作计划,提出毕业设计(论文)的具体要求,指导学生阅读文献和参考资料。
4.指导教师应定期(平均每周不少于一次)检查学生的工作进度与工作质量,填写《毕业设计过程跟踪表》。
及时解答和处理学生提出的有关问题,指导学生完成各阶段的设计(论文)任务,并认真填写毕业设计(论文)指导过程的各项表格。
5.指导教师应指导学生按要求及规范撰写毕业论文。
毕业论文及格式应符合《本科生毕业设计(论文)管理规定》、《毕业论文(设计)排版打印格式》的要求。
论文的具体要求是:
设计方案合理、理论准确、理论分析和技术分析充分、实验(试验)和计算的方法正确、各方面的数据可靠、图表规范清晰、文字表述的语言流畅简练准确;字数在8000字以上,一律按规定格式进行打印。
论文内容和设计方案要杜绝抄袭别人的成果,避免和往届类似题目内容上的雷同以及网上可查阅资料
 升级会员
升级会员 