十五自由度机器狗的设计.docx
《十五自由度机器狗的设计.docx》由会员分享,可在线阅读,更多相关《十五自由度机器狗的设计.docx(11页珍藏版)》请在冰豆网上搜索。
十五自由度机器狗的设计
十五自由度机器狗的设计
项目背景
机器狗是当今娱乐机器人中最典型的代表,也是最受广泛关注的机器人。
除了娱乐功能外,一些研发商已开始在原来的基础上扩展诸如防盗报警、搜索、追踪等与真狗相似而又比真狗更强的实用化功能。
索尼公司研制的“爱宝”机器狗,以及最近由一家英国公司研制的“咸克”机器狗,是这股机器狗潮流的引领者。
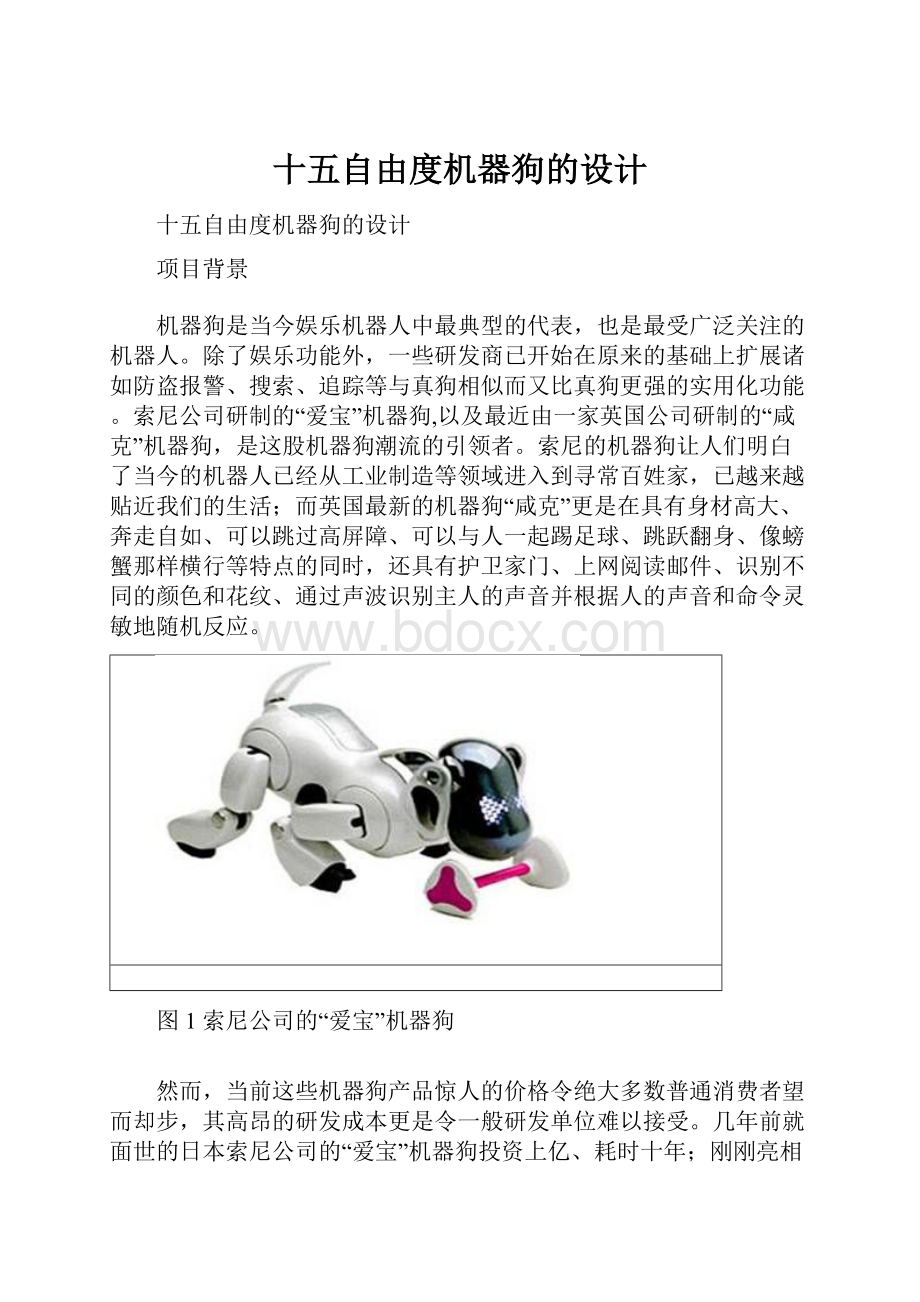
索尼的机器狗让人们明白了当今的机器人已经从工业制造等领域进入到寻常百姓家,已越来越贴近我们的生活;而英国最新的机器狗“咸克”更是在具有身材高大、奔走自如、可以跳过高屏障、可以与人一起踢足球、跳跃翻身、像螃蟹那样横行等特点的同时,还具有护卫家门、上网阅读邮件、识别不同的颜色和花纹、通过声波识别主人的声音并根据人的声音和命令灵敏地随机反应。
图1索尼公司的“爱宝”机器狗
然而,当前这些机器狗产品惊人的价格令绝大多数普通消费者望而却步,其高昂的研发成本更是令一般研发单位难以接受。
几年前就面世的日本索尼公司的“爱宝”机器狗投资上亿、耗时十年;刚刚亮相的英国“咸克”的投资也超过十万英镑。
高投入带来的虽然是技术上的先进却也是消费上的瓶颈。
索尼公司已传出消息,准备放弃对“爱宝”的进一步研发;而英国的“咸克”也仅是实验室里的一个玩物。
据此,本设计旨在提出一个成本相对较低、集娱乐性与实用性于一体的,适合于一般家庭消费者的机器狗实现方案。
它除了具有一般的各种仿真狗的动作与声音效果外,还具有主动测距完成避障以及追踪光球等娱乐功能。
如果进一步扩展,可以使其具有自动监控与电话报警的功能,以用于防盗、防火以及独处老人的突发病告警等。
本设计力图使之可以作为一个面向市场的低成本实用性机器狗的验证方案与实验平台。
总体方案
机器狗的形体具有15个自由度,即:
头部两个,尾部一个,四肢共十二个(每一肢三个)。
每个自由度均以舵机实现,舵机的转动范围与真狗的关节转动范围相近。
由此,机器狗可以实现抬头低头、转头、站立(立正)、直行、横向行走、转向、蹲坐、匍匐以及摇尾等诸多基本动作。
图2机器狗的形体结构与自由度分配
控制与传感系统采用以增强型8位单片机AT89S52为核心的主控制模块,结合超声波传感器、以光敏电阻和TLC2543为核心的光球追踪模块和以ISD2560为核心的语音模块等,实现其基本的控制与传感的功能。
驱动及控制电源选用9V容量约为1000mA·H大容量锂电池组。
由于本方案设计是在原理样机阶段,有待于对其功能做进一步扩展,故暂不涉及外观壳体部分的设计。
控制与传感系统设计
本设计的控制系统组成如图3所示。
系统以AT89S52单片机为核心的典型单片机作为主控模块,模块上留有专用的下载口线,使用89SXX系列单片机时可以利用ISP下载器通过该口线向其片内EEPROM下载程序(可以方便地进行编程调试和软件升级)。
主控系统板上加载有以ISD2560语音芯片为核心的语音系统,用于播放提示语音以供人机交流。
传感系统主要有红外避障模块、以光敏电阻配合TLC2543(12位AD转换器)构成的光传感模块等。
为配合整个流程及各个功能的实现,系统加装有遥控模块。
的M0、CE、PD和EOM信号线P3.0(RXD)、P3.1(TXD)、P3.2(INT0)与P3.7作为与超声波模块通信、控制及接收接近开关中断的信号线(其中P3.0和P3.1作为预留的模拟IIC总线接口与超声波模块分时复用),P3.3(INT1)、P3.4、P3.5和P3.6作为接收遥控信号的口线。
该模块电路原理图如图4所示。
图3机器狗控制系统组成
3.1)主控模块
该模块以AT89S52单片机为控制芯片,各口线除串行口(UART)和外部中断(INT)以外均作通用I/O口线使用(或作为模拟其它总线接口),所有用到的有关接口均加以1K的上拉电阻以提高驱动能力。
其中:
P1.1—P1.6与P0.1—P0.6共十二条口线,作为舵机的控制信号线,P1.0与P1.7作为头部一对舵机的控制信号线,P0.7作为尾部舵机的控制信号线,P0.0作为大功率发光二极管(装于机器狗眼部)的控制信号线,P2.0—P2.3分别作为TLC2543的CLK、DI、DO和CS信号线,P2.4—P2.7分别作为ISD2560
图4主控模块电路原理图
3.2)超声波避障模块
该部分以URM37超声波开关传感器维核心.该模块有一个红外发射头,两个红外接收头.当接收头前方有障碍物时,其对应的输出管脚发生逻辑电平变化.因此,系统可以根据两个接收头的电平信号来判断前方的环境.这个模块用掉系统3个引脚,两个使能信号线,一个信号输出线.
图5超声波模块与MCU接口原理图
3.3)光球探测模块
该模块以光敏电阻作为光敏感元件,通过外围电路将其电阻信号转换为电压信号,再以TLC2543(12位AD)采集并由MCU处理。
TLC2543具有转换精度高、与MCU接口简单等优点,从上世纪九十年代末开始在我国推广使用,应用范围非常广泛。
经实验验证,该模块对光球距离的探测距离可以达到1米以上,若在光敏电阻上加装遮挡罩,其探测距离可达2米以上;探测精度在0.25—0.5之间,足以满足本设计中对追球趣味娱乐的要求。
图6光球探测模块电路原理图
图中的TLC2543的模拟量输放入口线有8条作预留,可以用接其它模拟类传感器件。
3.4)语音模块
该模块以语音芯片ISD2560为核心,并另外配以专用录音系统板为其作预录音准备。
本系统中,为节省MCU口线,ISD2560工作于按键模式(Push-ButtonMode)下,具体电路可参照ISD2560的芯片资料进行设计。
3.5)遥控模块
该模块选用8通道电压信号非锁存型遥控发射与接收模块,通过74LS04非门作接口电平转换后,以74LS165与主控模块接口联接,其电路原理图略。
4)编写动作程序
4.1)基本步态
首先对机器狗的几种常规步态(直立、起、卧、前进、后退、转弯等)进行了分析,以此为基础设计出了比较简化的步态控制程序,以适应单片机的执行。
具体实现时,为简化编程,编写了一段通用程序,只需给定舵机的角度值即可完成一个动作,并且可以通过修改一定的参数来控制动作的执行速度,但它也存在致命的弱点,就是动作的执行完全占用了CPU,使得系统难以腾出时间来处理其他操作。
a、机器狗直行
b、机器狗转向
图7机器狗基本动作示意图
4.2)避障功能
进入避障模式后,系统根据两个红外接收端的状态转到相应的处理过程:
如果左前方有障碍,则后退两步,向右转弯,然后继续前进;如果右前方有障碍,则后退两步,向左转弯,然后继续前进;如果前方两侧都有障碍,仍然是向右转弯,然后继续前进,即右手习惯。
其工作流程如下图所示。
图8避障功能流程图
4.3)寻找光球
为了使机器狗能够发现区别于环境光的光球,硬件上增加光敏电阻传感器,并选用了TLC2543A/D作A/D转换,以达到更高的转换精度。
具体追球过程是这样实现的:
开机复位的时候,机器狗头转到中间从正前方采集一次环境光,作为后面判断光球的依据。
在寻找光球时,机器狗先是低头,然后每隔15度在前方160度范围内进行扫描,如果在某个角度发现光球,则转弯到正对光球的位置,执行踢球动作。
倘若没有发现光球,就将头抬起,每隔15度在前方160度范围内进行扫描,如果发现光球,则向光球方向前进;如果没有发现,则按原方向前进,继续寻找光球。
其工作流程如图9所示。
图9寻找光球流程图
5)完成结果
图10实物图片
5.1)形体参数描述
自由度:
15个,每条腿3个,共计12个;头部两个;尾巴一个。
总重:
2kg
体积:
270(长)×200(宽)×250(高)
功耗:
﹤15W
5.2功能描述
动作:
直行,后退,横行,左转弯,右转弯,坐下,站起,体操,摆尾;
避障:
机器狗能够避开前方15cm以内的障碍物。
追踪光球:
机器狗能够发现自己前方30cm以内160度范围里的光球。
语音:
在完成相关动作或实现有关功能的时候,机器狗能发出相应的声音。
遥控:
使用遥控器使机器狗在动作表演、避障、追踪光球三个模式中进行切换。
5.3)项目特色
我们申请该项目的初衷是完成一款智能型的娱乐机器人,使其能满足人们对娱乐机器人和智能机器人的需要。
与中鸣的机器人相比,我们的机器狗已在语音和传感上显示出很大优势。
作为一个智能型的机器人开发平台,我们的机器狗有着很大的扩展空间,它集功能应用与娱乐于一身,有很好的应用前景。
 升级会员
升级会员 