杭州电子科技大学自动控制原理实验报告.docx
《杭州电子科技大学自动控制原理实验报告.docx》由会员分享,可在线阅读,更多相关《杭州电子科技大学自动控制原理实验报告.docx(16页珍藏版)》请在冰豆网上搜索。
杭州电子科技大学自动控制原理实验报告
自动控制原理
实验报告
班级:
学号:
姓名:
指导老师:
3.1.1典型环节的模拟研究
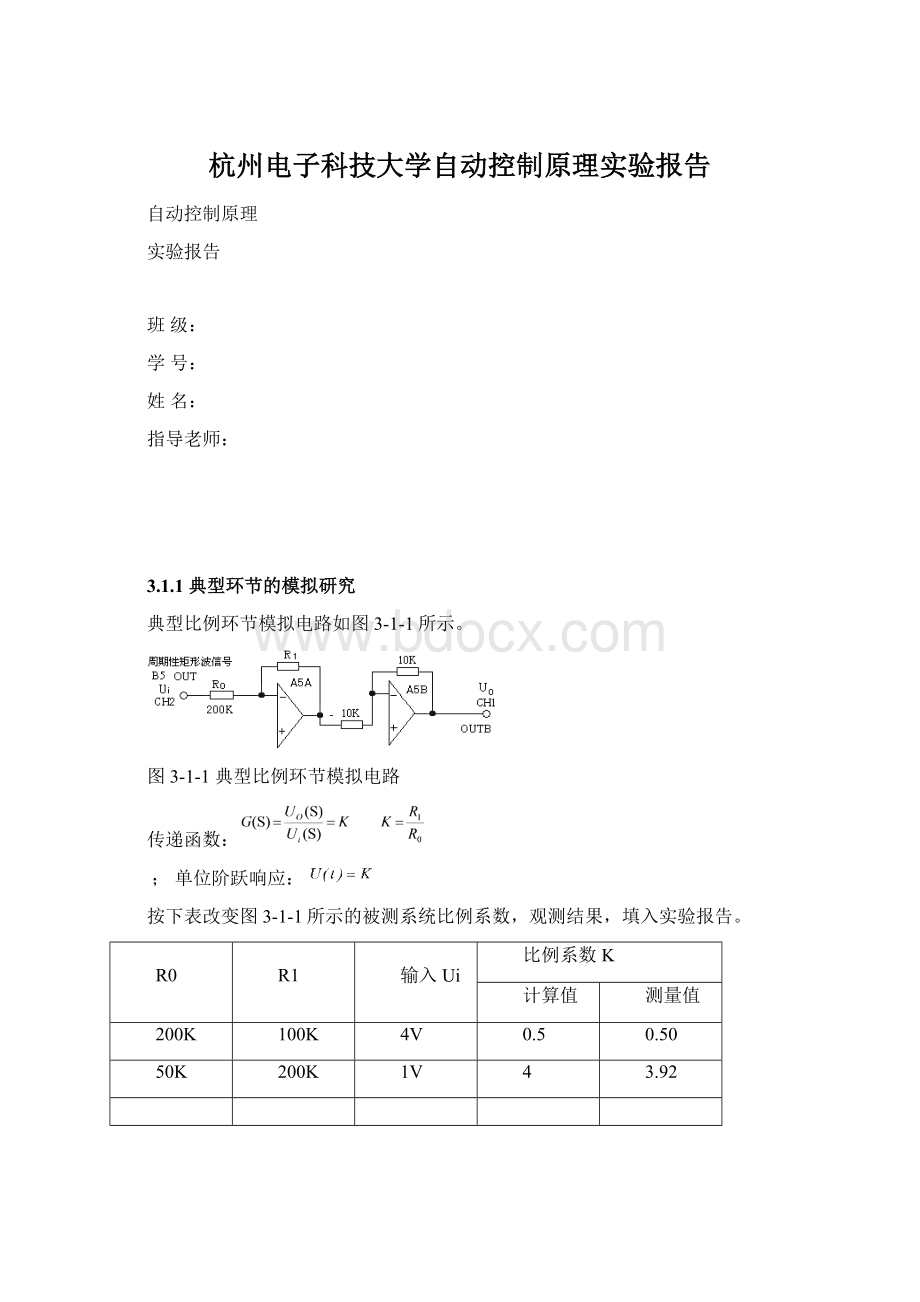
典型比例环节模拟电路如图3-1-1所示。
图3-1-1典型比例环节模拟电路
传递函数:
;单位阶跃响应:
按下表改变图3-1-1所示的被测系统比例系数,观测结果,填入实验报告。
R0
R1
输入Ui
比例系数K
计算值
测量值
200K
100K
4V
0.5
0.50
50K
200K
1V
4
3.92
图1比例:
R0=200,R1=100,Ui=4V
图2比例:
R0=50,R1=200,Ui=1V
2).观察惯性环节的阶跃响应曲线
典型惯性环节模拟电路如图3-1-2所示。
图3-1-2典型惯性环节模拟电路
传递函数:
单位阶跃响应:
按下表改变图3-1-2所示的被测系统时间常数及比例系数,观测结果,填入实验报告。
R0
R1
C
输入Ui
比例系数K
惯性常数T
计算值
测量值
计算值
测量值
200K
200K
1u
4V
1
1.0
0.2
0.2
50K
1u
1V
4
3.9
0.2
0.2
图3惯性:
R0=200R1=200C=1Ui=4
图4惯性:
R0=50R1=200C=1Ui=1
3).观察积分环节的阶跃响应曲线
典型积分环节模拟电路如图3-1-3所示。
图3-1-3典型积分环节模拟电路
传递函数:
单位阶跃响应:
按下表改变图3-1-3所示的被测系统时间常数,观测结果,填入实验报告。
R0
C
输入Ui
积分常数Ti
计算值
测量值
200K
1u
1V
0.2
0.21
100K
1u
0.1
0.10
图5积分:
R0=200,C=1u
图6积分:
R0=100,C=1u
4).观察比例积分环节的阶跃响应曲线
典型比例积分环节模拟电路如图3-1-4所示.。
图3-1-4典型比例积分环节模拟电路
传递函数:
单位阶跃响应:
按下表改变图3-1-4所示的被测系统时间常数及比例系数,观测结果,填入实验报告。
R0
R1
C
输入Ui
比例系数K
积分常数Ti
计算值
测量值
计算值
测量值
200K
200K
1u
1V
1
1
0.2
0.17
100K
1u
2
2.148
0.1
0.11
图7比例积分:
R0=200,C=1
图8比例积分:
R0=100,C=1
3.1.2二阶系统瞬态响应和稳定性
图3-1-7Ⅰ型二阶闭环系统模拟电路
积分环节(A2单元)的积分时间常数Ti=R1*C1=1S
惯性环节(A3单元)的惯性时间常数T=R2*C2=0.1S
阻尼比和开环增益K的关系式为:
临界阻尼响应:
ξ=1,K=2.5,R=40kΩ
欠阻尼响应:
0<ξ<1,设R=4kΩ,K=25ξ=0.316
过阻尼响应:
ξ>1,设R=70kΩ,K=1.43ξ=1.32>1
三.
按下表改变图3-1-7所示的实验被测系统,画出系统模拟电路图。
调整输入矩形波宽度≥3秒,电压幅度=3V。
(1).画出跃响应曲线,测量超调量Mp,峰值时间tp填入实验报告。
(计算值实验前必须计算出)
增益
K
(A3)
惯性常数
T
(A3)
积分常数
Ti
(A2)
自然频率
ωn
计算值
阻尼比
ξ
计算值
超调量Mp(%)
峰值时间tP
计算值
测量值
计算值
测量值
25
0.1
1
15.81
0.316
35.1
25.4
0.209
0.21
20
0.1
0.2
31.62
0.158
60.5
59.9
0.10
0.12
图9瞬态响应:
K=25T=0.1Ti=1
图10瞬态响应:
K=20T=0.1Ti=0.2
3.2.1频率特性测试
图3-2-1被测系统的模拟电路图
三.
按下表改变实验被测系统正弦波输入频率:
(输入振幅为2V)。
观测幅频特性和相频特性,填入实验报告。
並画出幅频特性、相频特性曲线。
输入频率
Hz
幅频特性
相频特性
计算值
测量值
计算值
测量值
1
5.95
5.78
7.16
7
1.6
5.85
5.62
11.37
12
4.5
4.82
4.50
29.49
31
8
2.99
2.76
45.15
47
12.5
0.62
0.304
57.52
57
图11频域分析:
1Hz
图12频域分析:
1.6Hz
图13频域分析:
4.5Hz
图14频域分析:
8Hz
图15频域分析:
12.5Hz
3.3线性系统的校正与状态反馈
控制系统的校正与状态反馈就是在被控对象已确定,在给定性能指标的前提下,要求设计者选择控制器(校正网络)的结构和参数,使控制器和被控对象组成一个性能满足指标要求的系统。
3.3.1频域法串联超前校正
串联超前校正后系统频域特性测试的模拟电路图见图3-3-5。
图3-3-5串联超前校正后系统的传递函数为:
图3-3-5串联超前校正后系统频域特性测试的模拟电路图
(3)运行、观察、记录:
3)串联超前校正系统的时域特性的测试
串联超前校正后系统时域特性测试的模拟电路图见图3-3-10。
图3-3-10串联超前校正后系统时域特性测试的模拟电路图
三.实验数据记录
相位裕度γ′
(设计目标)
测量值
相位裕度γ′
超调量Mp(%)
峰值时间tP
40°
41°
34.36
0.180
 升级会员
升级会员 