履带式液压挖掘机之行走装置的设计及校核docx.docx
《履带式液压挖掘机之行走装置的设计及校核docx.docx》由会员分享,可在线阅读,更多相关《履带式液压挖掘机之行走装置的设计及校核docx.docx(31页珍藏版)》请在冰豆网上搜索。
履带式液压挖掘机之行走装置的设计及校核docx
第五章履带式液压挖掘机之
行走装置的设计及校核
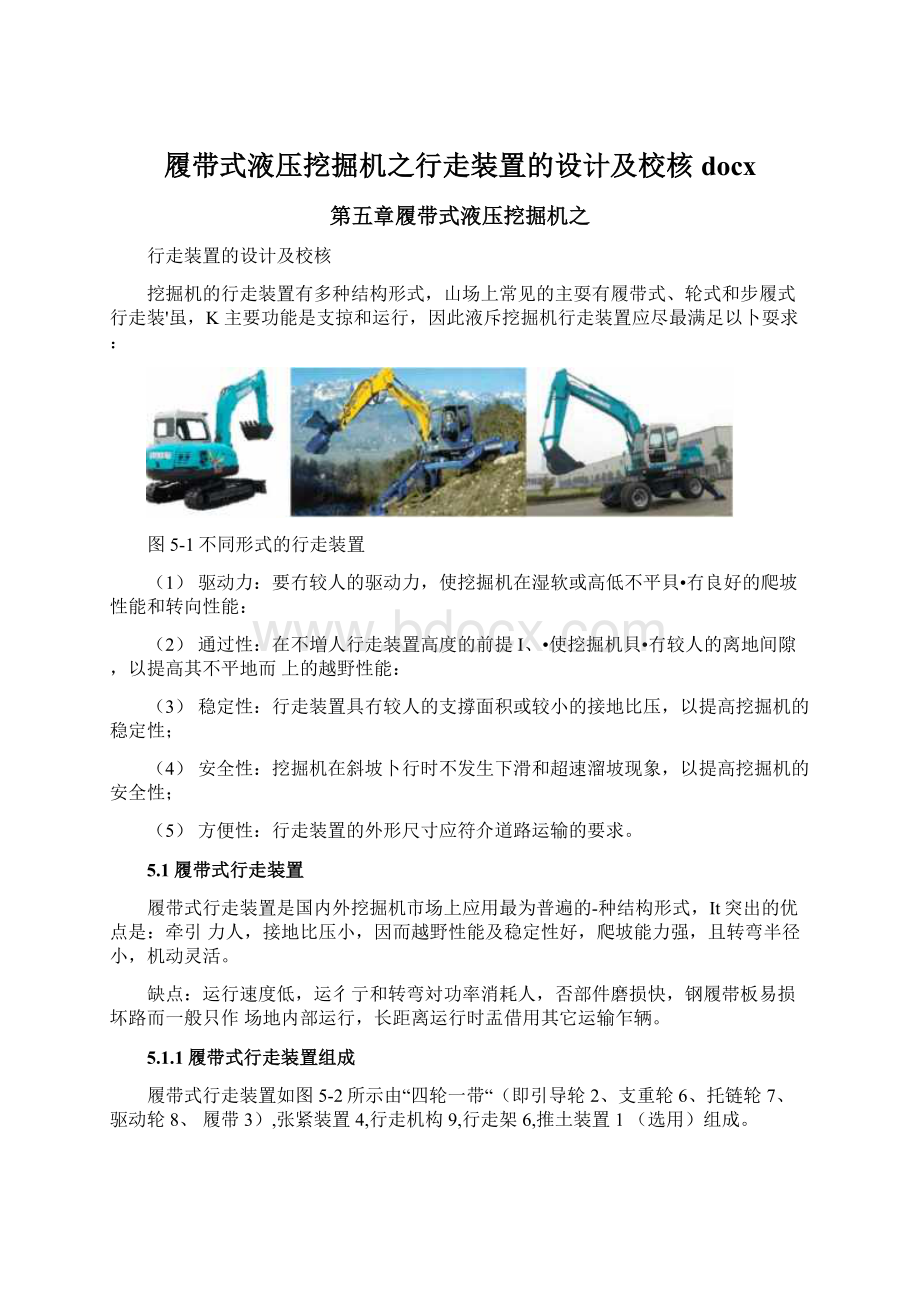
挖掘机的行走装置有多种结构形式,山场上常见的主耍有履带式、轮式和步履式行走装'虽,K主要功能是支掠和运行,因此液斥挖掘机行走装置应尽最满足以卜耍求:
图5-1不同形式的行走装置
(1)驱动力:
要冇较人的驱动力,使挖掘机在湿软或高低不平貝•冇良好的爬坡性能和转向性能:
(2)通过性:
在不増人行走装置高度的前提I、•使挖掘机貝•冇较人的离地间隙,以提高其不平地而上的越野性能:
(3)稳定性:
行走装置具冇较人的支撐面积或较小的接地比压,以提高挖掘机的稳定性;
(4)安全性:
挖掘机在斜坡卜行时不发生下滑和超速溜坡现象,以提高挖掘机的安全性;
(5)方便性:
行走装置的外形尺寸应符介道路运输的要求。
5.1履带式行走装置
履带式行走装置是国内外挖掘机市场上应用最为普遍的-种结构形式,It突出的优点是:
牵引力人,接地比压小,因而越野性能及稳定性好,爬坡能力强,且转弯半径小,机动灵活。
缺点:
运行速度低,运彳亍和转弯対功率消耗人,否部件磨损快,钢履帯板易损坏路而一般只作场地内部运行,长距离运行时盂借用其它运输乍辆。
5.1.1履带式行走装置组成
履带式行走装置如图5-2所示由“四轮一带“(即引导轮2、支重轮6、托链轮7、驱动轮8、履带3),张紧装置4,行走机构9,行走架6,推土装置1(选用)组成。
图5-2履带式行走装置
挖掘机行走运行时,驰动轮在驱动力矩的作用卜•产生一个拉力,企图把履带从支重轮卜拉出,由J:
支晅轮卜的履帯与地面间有足够的附着力,阻止履帶的拉出,迫使整机克服阻力向前移动使骡动轮卷动履带,导向轮再把履带铺设到地面上,从而住挖掘机沿着履带轨道向前持续运行。
挖掘机转向时,山安装在两条履帯上、分别山液压泵供油的行走马达通过对汕路的控制,很方便地实现转向或就地转弯,以适应挖捌机在各种地面、场地上运动。
1.履带
履带是将挖掘机的重力及工作和行走时的我荷传给地面。
挖掘机履带按材质可以分为钢履带与橡胶履带;钢履带耐磨性好,维修方便,经济性好因而运用普及:
橡胶履带是为了保护路面不受损伤一般运用在小型液压挖掘机上。
钢履带由履带板、链轨节、履带销轴和销套等组成;常用屜带板分为单筋、双筋和三筋三种,单筋履带板筋较鬲,易插入地而产生较人的牵引力,主耍用推土机上;双筋履带板筋稍矮易「•转向,且履带板刚度较好,三筋履带板由J:
筋多,使屜带板的强度和刚度都得以提高,承匝能力人,所以在挖掘机上广泛应用,三筋履带板上有四个联接孔,中间有清泥孔,为链轨绕过驱动轮时可借助轮齿清除链轨节上的淤泥:
相邻两履带板制成搭接部分,防止履带板之间夹进石块而产生过高的
图5-3履带的典塑结构及其组成
吨位不同的挖掘机选用节距不同的履带,挖掘机用履带的技术要求及规格尺寸可参考国家建筑工业行业标准JG/T57-1999,目前,该标准没有涵盖小挖和特大型挖掘机应用的履带規格,在这些挖掘机履带选型时,可根据机器的技术条件,参照履带生产厂家的技术标准。
表5~1液压挖掘机用主耍履带节距规格
应用机器质量(吨)
3.5~9
10~40
>40
节距(iron)
101
135
140
154
171
175
190
203
216
229
260
317
•••
2/24
2.支重轮
挖掘机的匝力通过支暇轮传给履带,在挖掘和行走时还经常受到冲击,所以支贞轮所承受的载荷很人,支贞轮的匸况恶劣,密封性耍求可靠;支車轮的布置设计需考虑履带链轨的节距,以免引起卜•车共振现象。
挖堀机用支重轮的技术婆求及规格尺寸可参考国家建筑匸业行业标准JG/T59-1999《液压挖掘机支重轮》以及生产厂家的技术标准。
I2934565278
I1一螺塞
2—端盖
3—
轴
4—轴套
5—浮动油封
6—浮动油封环
7—0形圈
8—销
9—轮体
图5-4支重轮的典型结构及其组成
3.托链轮
用J:
托起上部履带,防止苴过度卜連。
在托链轮的布盘设计时,需考渥履带脱离驱动轮的离去角和滑向引导伦的引入角,以减小履帯运行过程时的内阻。
托链轮的结构与支重轮类似,所以在仃些挖掘机上用支重轮來替代。
挖掘机用托链轮的技术要求及规格尺寸可参考国家建筑工业行业标准JG/T58-1999《液压挖掘机托链轮》以及生产厂家的技术标准。
图5-5托链轮的典型结构及其组成
3/24
1一端盖
2—螺塞
3—螺钉
4一垫片
5—轴套
6—轮体
7—浮动油封
8—浮动油封环
9—靖盖
10—轴
4•导向轮
用r引导履带正确运转,可以防止跑偏和越轨,人部分液压挖掘机的导向轮同时起到了支重轮的作用,这样可增加履带对地而的接触而积,减小比压。
导向轮的轮面人多制成光而,中间仃挡肩环作b向用,两侧的环而则能支撐轨链起支巫轮的作用。
导向轮的中间扌当川环应仃足够的高度,两侧边的斜度要小,导向轮与最靠近的支重轮距离愈小则导向性能愈好。
1一轮体
2—浮动油封
3—浮动油封环
4一螺栓
5—垫圈
6—销
7—连接板
8—密封圈
9—滑轨
10—轴套
a—n
图5-6导向轮的典型结构及其组成
5.驱动轮
图5-7驱动轮的典型结构
4/24
用來将彳j•走机构的动力传递给履带,因此対驱动轮的主耍耍求肚啮介平稳,并在履带因销套磨损而伸长时,仍能很好啮介,不得仃“跳齿”现彖。
履带行走装置的驱动轮通常放在后部,这样既可缩短履带张紧段的长度,减少功率损失,又可提高履带的使用寿命。
6.张紧装置:
张紧装置能够调整履带的张紧度,张紧装置的弹费半履带行走时产生过人的阻力时迫使导向轮向驱动轮方向移动,并压缩弹赞,使履带松驰,起到绥冲和保护作用。
图「8张毀装置的典型结构及其组成
1一张紧油缸
2—弹赁
3—限位套
4—支承座
5—螺母
6—螺钉
7—组介燈圈
8—加油工几
7.行走机构:
行疋机构包括行走马达、彳」淀减速机和行走制动阀。
行走马达-般为变彊轴向柱塞斜盘式,带仃停车制动器(湿式单片常闭式)。
马达宙來门泵的压力油操作旋转,并将扭矩传递到行走减速装宣。
行走减速机为多级行星齿轮减速式,降低行走马达的速度,増人行走马达的扭矩,使驱动轮和履带转动。
行走制动阀的作用是保护行走汕路O
1—行•走制动阀
2—行走马达
3—行走减速机
图5-9行走机构的典型结构及其组成
8.行走架
行走架一般由中间架与左右履带梁组成,根据Jt结构形式可分为X架(如图5-10)与H架(如图5-11)•目前市场上又根据苴卜车宽度的是否变化分为固定式与伸缩式。
图5-12推土装置
9.推土装置
在小型挖掘机上,一般都装白推土装置•其主耍功能是推土平地■同时在挖掘作业时辅助支撐,增加整机的稳定性。
1—推十铲
2—轴
3—轴套
4一防尘圈
5—螺栓
6—螺母
7—油杯
8—护帕
9—油缸
5.1.2履带式行走装置布置设计
一、设计方式及步骤
履帯行走装置由丁运行速度低,一般为1鸯km/h,因此设计时主耍保证支承性能,并兼顾运行性能,其步骤是:
(1)初定“四轮一帯”等仃关参数和行走系结构布迓;
(2)计算承载能力,包括接地比压和行走架结构强度计算;
(3)选择行走机构传动方案,拟定行走液压系统,确定行走液压马达主参数和减速器速比,验证行走速度、爬坡能力和原地转弯能力等。
二、结构布置及参数
(1)履带支承长度L,轨更B和履带板宽度b应合理匹配,使接地比压,附着性能和转弯性能均符介要求:
(2)履带节距t。
和驱动轮齿数z应在满足强度、刚度的情况卜尽可能取较小值以降低履带高度:
(3)驱动轮齿数一般为奇数,z=19~23。
为使H。
不致过人,又兼顾履带运动的平稳性,当t。
取小值时则z取大值,当t。
取大值时z取小值•
(4)
根据规格化后的t。
和z确定“四轮”直径:
(5-1)
(5丿托琏轮在现在设计中为了提高托链轮的可靠性,托琏轮常用支重轮來代替;当L>2000mm时.托链轮的个数为2,Lt〜L/2;否则,取1个。
r
(6丿履带板总和:
/?
=—
(5-3)
计算后再圆幣。
式中:
厶‘一履带全长,r«2L+-r0+[丄~1)。
+24(5-4)
212丿
(7)履带缓冲弹簧张紧力和工作行程的确定
履带彳J淀装置的导向轮通过缓冲弹簧和张紧装豐固定在履带架上,它对沿履带架滑动以改变轮距,保证履带的拆装,减少运行过程中的冲击,避免轨链脱轨。
缓冲弹费应冇足够的预紧力,该力应保证缓冲弹簧不会因外來的微小冲击而产生变形,引起履带跳动或脱轨,但过人会恶化履带架受力,加剧零部件磨损,降低行走装置效率。
缓冲弹簧安装载荷:
F=l.35Fk
(5-5)
式中:
Fk条履带的牵引力,(N)
缓冲弹簧刚度:
K厂F/山-厶)
式中:
尸一缓冲弹簧安装载;荷;(N)
Lo—弹簧口由长度:
(m)
Li—弹簧安装长度:
(m)弹簧承受垠人嚴荷时长度:
Li"o-(Fg/K。
)
(5-7)
式中:
Fmg:
缓冲弹簧绘人载荷;经验值F叫严2F弹簧理论压缩行程:
(5-8)
弹簧理论斥缩行程应小J:
斥死行程:
因驱动轮会夹石行走,刚斥死行程应人「•或等齿高。
(8)行走系结构布宣,根据已选定的轮距和四轮£1径确定四轮位宣
支巫轮数吊根据履帯架的长短而泄。
靠近导向轮的一个支重轮,应保证导向轮在缓冲彳J:
程屮不
致受到干涉、靠近恥训轮的一个支重轮勿与从动轮相硼:
尽灵避免支呃轮打履帯轨链在行走时发件:
共振。
驱动轮布置在后方可缩短履带驱动段的长度,减少功率损失。
托轮主要用來限制履帯上分支垂度和抑制翘带跳动。
托轮上轮缘平面的高度应高丁驱动轮的节圆半径,以便『履带脱离驱动轮的啮介,便J:
履带借自币;滑向导向轮和便J:
排泥;导向
轮,驱动轮下方与支匝轮卜缘要冇一升变鼠,以防止刚性轨链在绕过导向轮时呈多角形的轨链节在接地时顶起导向轮使整机摇见,升变吊为:
图5-14升变量示意图
(5-9)
(9)行走相关计算
A、行走机构输出转速口
(5-10)
式中:
Q—进入行走机构流鼠;(L/min)i一行走减速机速比;
q—行走马达排战;(cm3/rpm)久一行走马达容积效率:
B、行走机构驱动扭矩M
(Nm)
(5-11)
式中:
P—进入行走机构压力:
(Mpa)q—行走马达排眩;(cm3/rpm)几”一行走减速机机械效率;
(5-12)
C、履帯式存走装迓厅走速度V
V=30*n*Z♦*10%(km/h)
式中:
Z-驱动轮齿数;
Dk—节恻直径,(mm)
D、履帯式行走装置彳亍走牵引力
(KN)
式中:
Z—驱动轮齿数:
f。
一履带节铢•(mm)
5.1.3,履带式行走装置设计计算
一、承载能力计算
1、履带接地比压计算1)平均接地比压:
履带式液压挖掘机的两条履带与水平地而完全接触,J1整机重心在接地面积的几何屮心,对地面产生的压力称为平均接地比压:
卩=(5-13)
72/\L+O.35/7o)
式中:
P-履帯平均接地比压,(Pa)
m—挖掘机的工作质昴,(kg);
L一履带的接地长度,(m)
b—履带的宽度,(m)
Ho—履带高度,(m)
g—重力加速度,g=9.81m/s2o
平均接地比压是履帯式液压挖掘机越野性能的一个重耍指标,可以用來与同类型号产品作比较。
2)最大接地比压:
纵向最大接地比压:
当工作装置顺着履带方向,幣机币:
心在纵轴线上移动时,令c示偏心距,刚履带两瑞的最人、
最小接地比压为:
图F16横向接地比压变化图
在任意方向的最大接地比压
当工作装置位「与纵向小轴线成夹角为a(如图5J7所示人挖掘机合力G位J•以色为半径的2
圆弧上时,最大接地比压:
令合力G绕V轴的倾覆力矩m=丄GBcosa,对x轴的倾覆力矩m通过
‘2"2
x=0•另M、=0»G-0('/
将式(5-21)代入(5-20)得
当“今
用试凑法可求得a值,将a值代入式(5・26丿即叮求得任意方向的最人接地比压。
最大接地比压决定了挖掘机能否在松软地面上工作。
因此研究履带的最大接地比压和最小接地比压的变化与重心位置的关系对正确设计履带行走装直是重要的。
2、履带式行走装置牵引力计算
挖掘机行走时,镒要克服行走中所遇到的各种运动阻力,牵引力也就是用「克服这些运动阻力的。
牵引力计算原则是行走装置的牵引力应该人「•总阴力,而牵引力乂不会超过机械与地面的附着力。
1)履带运行阻力计算
履带运行时,由「•驱动轮与履带轨链的啮合,履带销轴间的摩擦以及支币:
轮,导向轮和张动轮等滚动阻力和轴颈摩擦阳力等构成了履带运行的阻力;履带式行走装置的运行阻力有十•壤变形阻力、坡度阻力、内阻力和转弯阻力及风阴力和惯性阻力。
A・土壤变形的阻力
土壤变形阻力是土壤对履带运行的阻力,由支乖轮沿履带滚动,履带使土壤受挤压变形而引起的.对「•一•条履带的变形阻力为:
尸泌=-Pt,hh~
对J•双履帯的变形阻力为:
几=Pobh2
(5-27)
(5-28)
式中:
几一土壤的比压,(kPa)
b—履带宽度,(cm)
力一受压表而下陷深度,(cm)
B、履带对地面的水平挤压力
|勾5J8表示地面在履带滚轮作用卜的变形惜况,若履带宽度为b,则圜周上挤压土壤的微段ds的面积为bds,则bds面上所受挤压力为:
dFp=pbds
式中:
p‘一深度力’处的比压力,(Pa)
讥一变形土壤ds段圆弧面上的总挤用力,
(N)
挤压力的水'卜分为:
dFh=“你sina
(a)
乂根据图,设滚轮半径为R,则有:
ds=Rda
(b)
p=PqIi1=p0(Rcosa-Rcosa0)
(c)
图5-18履带对水平地面挤压变形
将式(b)和式(c)代入式(a)得:
(lFh-bR2p0(cosasina-cosa0sina\la
在土壤变形圆弧段的包角范用内对上式积分,得到
(5-31)
(532)
将COSdo=
R-h
=代入上式,并经整理化简得到单条履帯对地面的水平挤压力:
R
(5-29)
C、履带的运行比阻力
双履带的地而总变形阴力Fd即为运行阻力:
(530)
令履带运行比阻力系数入严电
mg
Fd=人mg
将式(5-31)代入式(5-30)并整理得:
2_Fd_心;b一屮叽/bI
mg2Lp°bp腹2Lp°
式中:
Ad——运行比阻力系数,根据试验确定,见农5・2;
m—机器总工作质最,(kg)
L——履带接地长度,(ni)
表5-2运行比阻力系数
路而系数
比阻力系数
路面系数
比阻力系数
圆石砌的中级公路
0.05-0.06
湿地
0.10-0.15
坚实的土地
0.06-0.12
冰冻路面
0.03-0.04
野地
0.09-0.12
由以上分析町得到如卜结论:
U)履带运行阻力耳与0’成正比,故多支点履带装置比少支点履带的地面变形阻力小;
⑵运行比阻力系数人与平均比压力几成正比:
(3)运彳j•比阻力系数儿与卩。
成反比,故地面愈松软,阻力就愈人;
(4丿运行比阻力系数人与般带支承长度L成反比,如果从减小人来看,在同样的平均比斥力下,应采用较长的履带,而不用宽履带。
在实际计算中,通常采用Fd=易〃农计算运行比阻力;在坡道中运行比阻力为Fd=cosa其中a为坡度角度。
2)坡度阻力
坡度阻力是机器在斜坡上因门重的分力所引起的。
设坡角为Q,则坡度阻力为:
(5-33)
(5-34)
F$=mgsina式中:
m—挖掘机工作质量,(kg)
3)内部阻力
A・驱动轮与履带的啮合阻力Fnl
仏誌(1-血)
式中:
好一履带紧边张力,(N)
%_驱动轮与履带的啃介效率,一般取^=0.95
B.驱动轮和导向轮轴颈的摩擦阻力
驱动轮和导向轮轴颈处的靡擦阻力是由履带的张力造成的,根据驱动轮的不同旋转方向,可分为两种情况。
当驱动轮正向旋转,如图5-19所示,即挖掘机向前行驶时,履带卜分支为紧边,上分支为松边。
1点处履带张力为F,,由驱动轮的驱动力矩产生,2、3、4点处履带的张力为耳,是由初始张紧力及履带上分分支悬垂造成的。
将驱动轮和导向轮轴颈上的靡擦力矩换算到朋动轮节圆上,则有:
你严伉+3F°)“x#N)(5-35)
式中:
厅一履带紧边张力,(N)
化一履带松边张力,(N)“一轴颈屮的摩擦系数,
用铜衬套,取“=0.08~0」0,图F19前进时履带运行张力
(1一驱动轮和导向轮的轴颈直径(假定
二者直径相同),(m)
D—驱动轮节圆直径,(m)
肖驱动轮反向旋转,如图5-20所示,即挖掘机倒退行驶时,履带卜•分支为松边,上分支为紧边。
1点处履带张力为化,2、3、4点处履带的张力为斥,由驱动轮的驱动力矩产生。
同样将驱动和导向轮轴颈上的摩擦力矩换算到驱动轮肖圆上,则仃:
FKF°+3F»x*<«6)
图5"20后退时履带运行张力
一般情况下,Fq=(O.O3~O・15)Ft>所以人2比巴2人得多。
由此可见,当挖掘机倒退行驶时,履带屮的摩擦损失将比向前行驶时人。
I人1此,挖掘机行走时,一般应后轮驱动,向前行驶。
C.履带销轴间的摩擦阻力
设履带节距为t,驱动轮齿数为Z,则驱动轮每转-圈,位J:
节圆上的Z块履带板郁耍绕销轴
转动,每块履帯板的转角为:
4〃
ct=—
Z
在履带张力作用卜毎块履带板销轴转过a角所做的摩擦功为:
W产片二斥曲/号(W)(5-37)
式中£—履帯拉力,(N)
“I一履带板销与孔的摩擦系数,ZA=0.25-0.4d‘一履带销轴貢径,(m)
如前所述.液压挖掘机常用后轮驱动.前进和后退叭履带上卜分支中的张力是不同的,所以.履带销轴的摩擦阻力F注的计算也分两种情况。
a.如图5J9所示,挖掘机向前行驶,当驱动轮和导向轮转一周时,在1、2、3、4各点均有履带板绕上或绕出,每条履带的履帯销轴屮的总摩擦功为:
D.支重轮的摩擦损阻力Fn4
这项损失的讣算和车辆沿轨道运动样。
式中:
m—作用J:
履带上的总质杲,(kg)
支币;轮外径,(m)
d°—支重轮销轴外径,(m)
/一滚动肆擦系数;/=0.03^0.05
心一销轴和支巫轮轴套Z间的摩擦系数:
ZA=0.1
综上所述,等效到驱动轮节岡上的每条履带总内阴力分别为:
当挖掘机前进时:
F”=仏+F”,+Fn,+臨(5-42)
当挖掘机后退时:
化=F祇+F;2+F:
‘+F”4(543)
上面这些计算公式只白当知道履带全部尺寸,即结构设计完成后才能使用,初算时,可取履带本身阻力等J•整机单边垂直自重载荷mg的6%,即
Fn=0.06mg(N)(5-44)
考虑到这些损失,在计算内阻力时也可取履带行走装置效率等P0.8o
4)转弯阻力
履带行走装直转弯时所受到的阻力较为复杂,具屮包括履带板与地面的摩擦附力,履带板侧面剪切土壤的阻力以及履带板突筋挤斥土壤的阻力等。
这吐阻力耍全部进行详细计算是闲难的,但因第一项阻力最人,也是主耍的,所以重点研究履带板在转弯时与地而的摩擦阻力矩。
履带板与地而的摩擦阻力矩主要与履带上比压的分布以及不同的工况仃关。
对挖掘机來说,由转弯时机器空48,Ifijlil:
作装置是悬起的,因此戕带比压垄本上町看作均匀分布。
因些,履帯的转弯运动可看作如图5-21所示沿折线行走,即履带由2至3、3至4为直线运行,而在3处绕履带自身转一角度。
设履带宽为b,接地长度为L,HL/b>5,则一条履带的微面积bdx绕履带中心点0转动时的力
矩可表示为:
伽;=p^bxdx
式中:
p—接地比压,Pa:
山一挖掘机转弯时履带与地面
的摩擦系数。
-条履带的转弯阻力矩为:
图5-21履带转弯阻力计算简图
1111
=2fdMm=2p吗bfxdx=—p/^bLr=—pt3m^L(5-45)
式中:
m—挖掘机匸作质量,(kg)
L一履带接地长度,(m)
对J:
双履带行走的液斥挖掘机,其转弯阻力矩町认为是单条履帯的2倍,即
Mm=扌“zgl(5~46)
烽擦系数"3与支承表面土壤性质和转弯半径有关,可用经验公式表爪为
“_Amx(5-47)
D
0.85+0.15-
B
式中:
R-行走履带的转弯半径,(m)
B-履带轨距,(m)
"max-单侧履带制动条件.履带转弯时最人摩擦系数,见卜•表
表F3履带转弯时最大廉擦系数“中%
土壤性质
心值
土壤性质
心值
有雪的荒地
0.6-0.8
湿地。
耕地
0.8-1.0
干的土路
0.7-0.75
沼泽地
0.85-0.9
干的沙路
0.8-0.9
潮湿的黏质土
0.4-0.5
在实际计算时,",值可近似选取,对「•坚实地面取较小值,对J:
松软地面取较人值,一般取
值范围为〃3二0・4~0・7
当挖掘机转弯时,可以把摩擦阻力矩换算为转弯行驶阻力
e丄X(5-48)
r4R
由此可见.转弯行驶阴力与转弯半径成反比。
将履带平均接地比压
代入式(548),可得
F=丄x山心(5-50)
r2R
由此可见,转弯行驶阻力与履带接地长度平方成正比。
从这一点來看,加人履带长度対转弯是不利的。
当液斥挖掘机以单条履带制动转弯时,履带板侧边与地面刮土的附加阻力系数P(P=1.15)>根据式(547),由R・B・右“严“口,所以,此时的转弯行驶阻力可表示为:
几冷彳S51)
(5・52)
在方案设计初期,因履帯的轮距与轨距还未确泄,整机原地转弯阻力按以卜经验公式來进彳J:
验算:
Fr=(0.7〜0・9)“3吨
5)风载阻力
风戦阻力町农用为:
化=办代<5-53)
式中:
F-挖掘机的风我阻力,(N)
W
仇一挖掘机工作状态的风压,取仏=250Pa,
人一挖掘机的迎风面积,(m2)
6)惯性阻力
挖掘机的行走匸况较为复朵,惯性阻力主要指整机启动行驶时的惯性力,惯性阻力存为:
F,=(0.01"0.02)mg(N)(5-54)
综上所述,以上6种运行阻力中,以坡度阻力和转弯阻力为址人,往往耍占到总阻力的2/3,尤其液斥挖掘机的原地转弯附力比机械式的绕一条履带转弯阻力更人,但转弯和爬坡一般不同时进行。
因此,可以根据上坡时作ft线行走的情况计算履带行走装置,并根据平道上转弯的情况來验算。
故在实际计算紐帯行走装宣的牵引力时,总是从卜両两种组合情况中选用较人者,即
爬坡时:
F厂Fd+F$+F「F“+Fj(5-55)
转弯时:
&二巧+仔+伫+化+厅<5-56)
式中:
仔一履帯式液压挖掘机的行走牵引力,(N)
几一履带式液床挖掘机行走时的运行
 升级会员
升级会员 