第七章数控机床的伺服完整系统.docx
《第七章数控机床的伺服完整系统.docx》由会员分享,可在线阅读,更多相关《第七章数控机床的伺服完整系统.docx(11页珍藏版)》请在冰豆网上搜索。
第七章数控机床的伺服完整系统
第七章数控机床的伺服系统
第一节概述
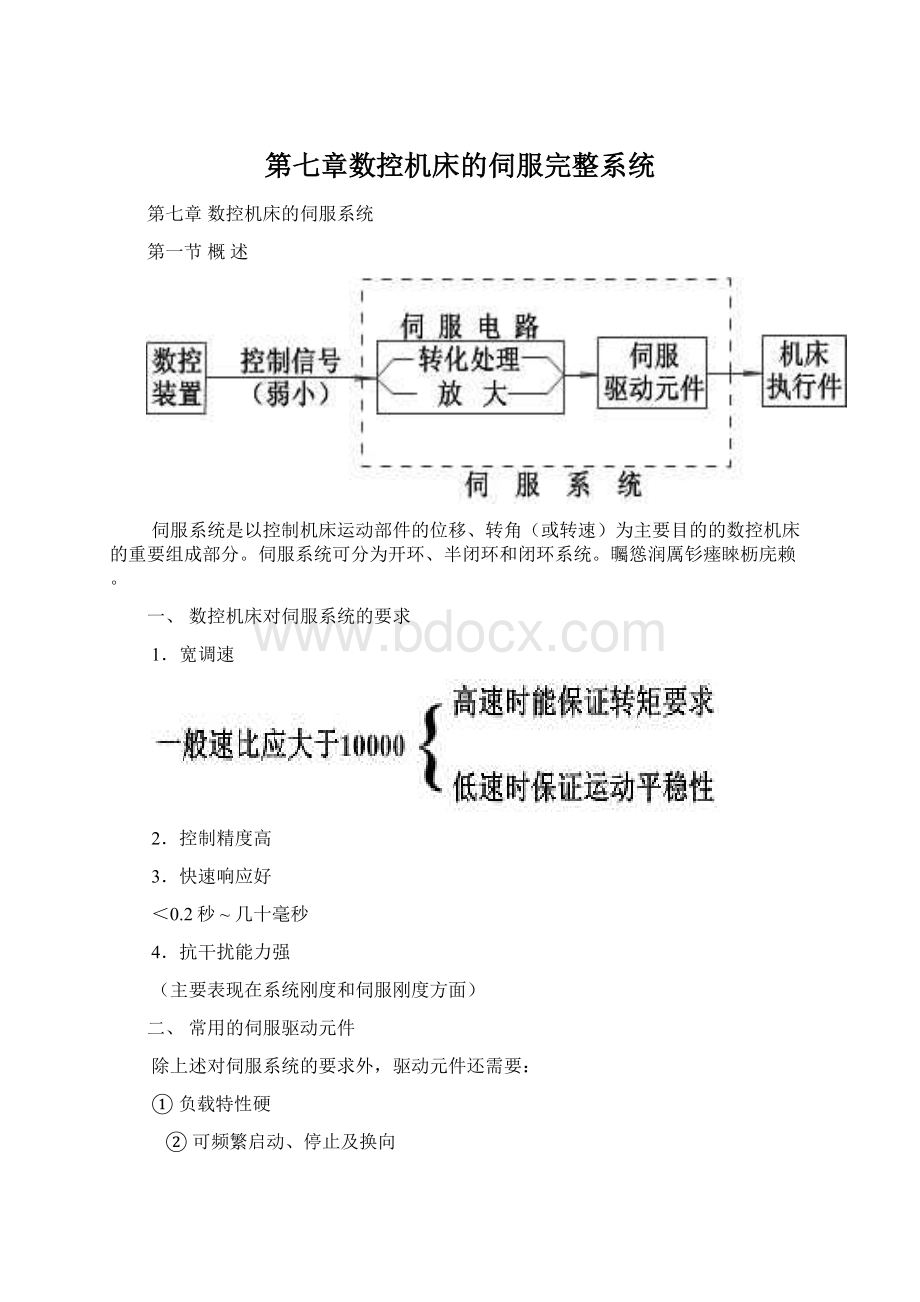
伺服系统是以控制机床运动部件的位移、转角(或转速)为主要目的的数控机床的重要组成部分。
伺服系统可分为开环、半闭环和闭环系统。
矚慫润厲钐瘗睞枥庑赖。
一、数控机床对伺服系统的要求
1.宽调速
2.控制精度高
3.快速响应好
<0.2秒~几十毫秒
4.抗干扰能力强
(主要表现在系统刚度和伺服刚度方面)
二、常用的伺服驱动元件
除上述对伺服系统的要求外,驱动元件还需要:
①负载特性硬
②可频繁启动、停止及换向
1.50~60年代,步进电机为主(目前用于经济型~)
2.70~80年代,直流伺服电机为主
3.90年代至今,直~仍占多数,00年后交流伺服电
机↑↑,新的设计交流伺服电机的使用已占多数。
第二节步进电机
一、特点
1.转子转角与脉冲输入数目成正比;
转子速度与脉冲输入频率成正比。
2.只要维持控制绕组电流不变,则具有自整步能力(即具有制动能力)
3.有一定的步距精度,没有累积误差(即周累积误差为零)
4.缺点:
效率低;拖动负载能力不大;
调速范围小;脉冲当量(步距角)不能太小。
5.使用:
步进电动机使用于经济型数控机床;
一般用于开环系统。
[注]脉冲当量——每对应数控系统发出一个的一个脉冲,机床执行件走过
的一个位移(或转角)。
二、分类
反应式(转子铁心)
1.按工作原理分永磁式[转子(永)磁钢]
电磁式
永磁感应子式(混合式)
2.按运动方式分
(如直线运动、旋转运动、……)
3.按结构分
(如单段式、多段式)
4.按相数分
(如3相、4相、……)
三、步进电机工作原理
(以反应式为例)
1.通电方式
(1)三相单三拍(单相轮流通电)
(K=1)
ABCA…
(每转步数mz步)
步进电动机工作原理图
(2)三相双三拍(双相轮流通电)
(K=1)
ABBCCAAB…
(每转步数mz步)
(3)三相六拍(单双相轮流通电)
(K=2)
AABBBCCCAA…
(每转步数2mz步)
2.步距角β
β——每输入一个脉冲,转子对应转过的角度。
由于步进电机一旦制造好,其相数和齿数即已确定,所以每一台步进电机的步距角是确定的,因通电方式不同有两个值。
聞創沟燴鐺險爱氇谴净。
一个步距角对应一个脉冲,一个脉冲对应一个脉冲当量。
2.步进电机的转速n
二、步进电机的主要性能指标
(一)基本要求
1)能够迅速起动、正反转、停转及在很大范围内进行转速调节。
2)加工精度高。
运转过程中,不得失步。
3)输出转矩大,可直接带动负载。
(二)性能指标
1.矩角特性与最大静转矩
定子一相绕组通电,则:
空载时——转子齿与通电相定子齿对齐;
带着载荷时——在外转矩作用下,转子齿与通电相定子齿被拉动错移。
只要通电相位不变,则电机不转(即具有制动功能)。
转子齿与通电相定子齿被拉动错移后产生的静态转矩M越大,其带动负载能力越强,运行的快速性和稳定性也越好。
残骛楼諍锩瀨濟溆塹籟。
2.空载起动频率
起动频率要低。
这是因为起动要克服惯性矩的影响,具体说就是克服加速度的影响。
3.起动矩频特性
带动负载时的起动频率,随着所带负载的增加而降低。
(见图7-8)
4.空载运行频率
空载起动后,连续提高脉冲频率至电机不失步运行的最高频率,称为步进电机的运行频率。
5.运行矩频特性
步进电机在连续运行时,转矩和频率的关系称为运行矩频特性。
(见图7-9)
[注]运行频率远高于起动频率。
第三节直流伺服电动机
一、小惯量直流伺服电动机
数控机床诞生之初,没有能够满足数控机床要求的专用电机。
遂将普通的直流电机加以改进
(最主要的是将转子的惯量减小到1/10,以满足快速响应的要求),这就是早期使用的数控机床电机。
后经不断改进、定型后主要有:
直流印刷电枢电动机、杯式转子直流电动机等。
(现仅偶尔应用于一些小型数控机床中)酽锕极額閉镇桧猪訣锥。
二、大惯量(宽调速)直流伺服电动机
1.特点
1)转矩大
2)调速范围大[(1~30000)mm/min]
3)动态响应好(一般在0.1s,最快可几十毫秒)
4)过载能力强(允许短时过载5~10倍)
[注]近几十年来,资料所述对伺服系统的要求基本是以此电机为准提出的。
2.工作原理
(图7-25)
电流方向左手定则转矩方向
为了保证电枢始终朝同一方向旋转,必须要有能够不断改变电流方向的专用装置,即具有换向片与电刷的“换流装置”。
彈贸摄尔霁毙攬砖卤庑。
3.电机机械特性
此特性图表明:
1)随着负载变大,转速将降低(β越小,表明机械特性越硬)
2)负载不变,提高电枢电压可提高转速
3)转速不变,提高电枢电压可加大转矩
4.电机调节特性
此特性图表明:
1)电机起动后,逐渐提升电枢电压,则转速也随之升高,直到正常连续旋转。
2)当负载转矩为零时(M0=0),电枢电压从零开始升高,则转速也同步升高。
3)当负载转矩大于零时,电枢电压从零开始升高到某一值时,转速才开始升高;这一滞后区域称为“死区”。
5.电机工作特性
此工作曲线图表明:
1)电机在额定转矩和最高转速范围内(即连续工作区Ⅰ),可以任何的转矩、转速组合长时间地连续工作。
2)电机在短时工作区Ⅱ,可在不超过图中限定转矩和转速范围内,连续工作不超过规定时间。
(例如,电机性能指标为:
30min转矩=100Nm表明,电机可在不超过30min的任意时间段,高于额定转矩、低于100Nm情况下连续工作)謀荞抟箧飆鐸怼类蒋薔。
[注]工作一定时间后停止,则必须停止相同时间及以上才允许重新
起动。
3)瞬时加减速区Ⅲ是电机在起动或停止的极短时间内允许存在的工作区域。
[注]
①目前说“直流伺服电机”,通常指的就是“大惯量~”。
②最初“小惯量”的目的是为了“快速响应”,但“小惯量”带负载能力太差。
③改进:
在不降低“快速响应”的基础上,不断加大电机惯量。
④除极小型机床外,小惯量直流伺服电机必须依靠减速器才能带动负载。
⑤大惯量直流伺服电机则可以直接带动负载(交流伺服电机同此),这就使设计以及机床结构大为简化。
⑥大惯量直流伺服电机内部装有编码器(交流伺服电机同此),这就说明,只要采用大惯量直~(交流~)即已构成半闭环系统。
厦礴恳蹒骈時盡继價骚。
第四节交流伺服电机
交流伺服电机交流异步(感应)电机
交流同步电机
按产生磁场的方式永磁式
电磁式
交流异步电机比交流同步电机结构简单、重量轻、成本低,但交流同步电机具有较好的调速性能,这一点在数控机床中尤为重要。
茕桢广鳓鯡选块网羈泪。
与电磁式相比,永磁式的优点是结构简单、运行可靠、效率较高;缺点是体积较大、起动特性较差。
但永磁式在结构上采取措施后,有了很大改进。
鹅娅尽損鹌惨歷茏鴛賴。
综合分析,数控机床多采用永磁式交流同步伺服电机。
一、工作原理
(图7-15)
二、特点
交流伺服电机(与直流伺服电机相比):
1.结构简单、成本低
2.转子惯量较小,动态响应更好
3.没有换向器和电刷,不需经常维护
4.没有换向火花问题,最高转速可更高
三、电机工作特性
与直流伺服电机比,交流伺服电机的额定转矩线更趋水平,表明机械特性更硬;短时工作区域范围更大,尤其是在高速区域,这有利于提高电动机的加、减速能力。
籟丛妈羥为贍偾蛏练淨。
[注]①直至九十年代初,直流伺服电机还占据着绝对统治地位,随着交流伺服电机一些关键技术问题的解决,九十年代末进入市场后扩展极为迅速,正在逐步取代直流~。
預頌圣鉉儐歲龈讶骅籴。
②直流~具有更好的调速和控制性能。
所以今后的趋势将是交流~用于较低精度挡的数控机床,直流~用于较高精度挡的。
渗釤呛俨匀谔鱉调硯錦。
 升级会员
升级会员 