平面六杆机构.docx
《平面六杆机构.docx》由会员分享,可在线阅读,更多相关《平面六杆机构.docx(16页珍藏版)》请在冰豆网上搜索。
平面六杆机构
平面六杆机构的运动分析
成绩
指导老师董海军
班级05010804
学号2008301212张学振
2008301201黄永祥
2008301189罗春琦
1、题目说明
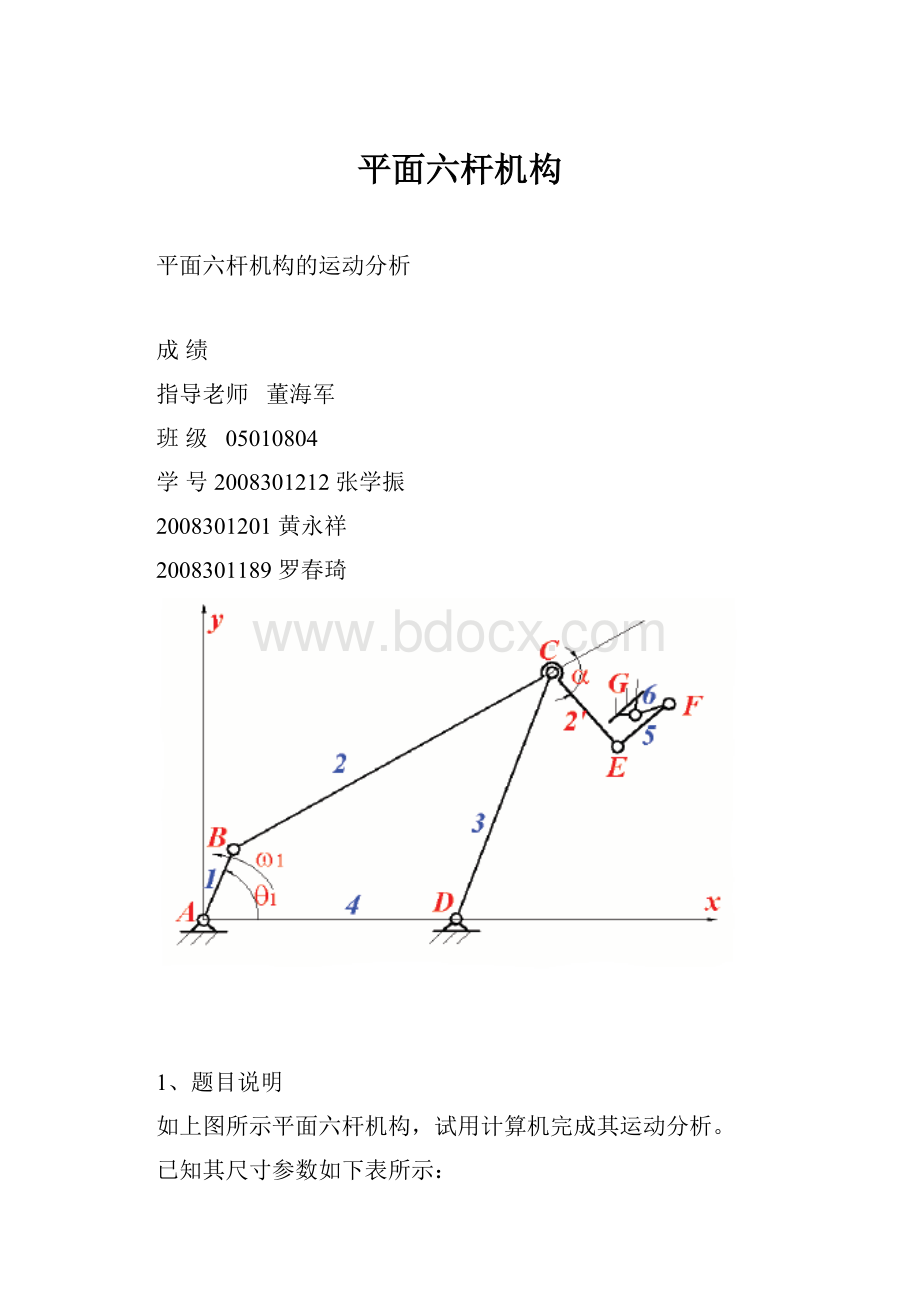
如上图所示平面六杆机构,试用计算机完成其运动分析。
已知其尺寸参数如下表所示:
组号
L1
L2
L2’
L3
L4
L5
L6
α
xG
yG
1-A
26.5
105.6
65.0
67.5
87.5
34.4
25.0
600
153.5
41.7
题目要求:
三人一组计算出原动件从0到360时(计算点数37)所要求的各运动变量的
大小,并绘出运动曲线图及轨迹曲线。
2、题目分析
1)建立封闭图形:
L1+L2=L3+L4
L1+L2=L5+L6+AG
2)机构运动分析
a、角位移分析
由图形封闭性得:
b、角速度分析
上式对时间求一阶导数,可得速度方程:
化为矩阵形式为:
c、角加速度分析:
矩阵对时间求一阶导数,可得加速度矩阵为:
d、E点的运动状态
位移:
速度:
加速度:
3、源程序
#include
#include
#include"agaus.c"
#include"dnetn.c"
#include"conio.h"
#defineAlpha(PI/3)/**/
#definePI3.14159265358979
#defineAngle(PI/180)
#definew11.0
#definexg153.5
#defineyg41.7
intk=100;
doublet=0.1;
doubleh=0.1;
doubleeps=0.0000001;
intm;
intjiaodu;/**/
doublel[7]={65.0,26.5,105.6,67.5,87.5,34.4,25.0};
doublea[4][4];
doubleb[4];
doublec[4];
doublee[6];
doublexx[2];
FILE*fp;
FILE*pf;
main()
{
intn,i,j;
doublex[4]={26.23*Angle,49.75*Angle,87.16*Angle,37.25*Angle};
fp=fopen("数据结果.txt","w");
pf=fopen("数据结果2.txt","w");
printf("每段第一行为各杆角度,第二行为各杆角速度,第三行为各杆角加速度,\n各杆顺序为l1,l2,l3,l5,l6\n第四行为E点的位置,E点速度,E点的加速度。
E点各值分别指向X和y方向\n");
for(m=0;m<=35;m++)
{
jiaodu=m*10;/**/
i=dnetn(4,eps,t,h,x,k);/*调用牛顿法求各杆位置,存放在x[0]~~x[3]中*/
printf("%f:
",jiaodu*Angle);/**/
fprintf(fp,"%ld\t%lf\t",jiaodu,jiaodu*Angle);
a[0][0]=l[2]*sin(x[0]);/*第一次赋值,求角速度*/
a[0][1]=-l[3]*sin(x[1]);
a[0][2]=0;
a[0][3]=0;
a[1][0]=l[2]*cos(x[0]);
a[1][1]=-l[3]*cos(x[1]);
a[1][2]=0;
a[1][3]=0;
a[2][0]=-l[0]*sin(x[0]-Alpha);
a[2][1]=-l[3]*sin(x[1]);
a[2][2]=-l[5]*sin(x[2]);
a[2][3]=l[6]*sin(x[3]);
a[3][0]=l[0]*cos(x[0]-Alpha);
a[3][1]=l[3]*cos(x[1]);
a[3][2]=l[5]*cos(x[2]);
a[3][3]=-l[6]*cos(x[3]);
b[0]=-l[1]*sin(jiaodu*Angle)*w1;
b[1]=-l[1]*cos(jiaodu*Angle)*w1;
b[2]=0;
b[3]=0;
for(i=0;i<=3;i++)
{
printf("%f",x[i]);
fprintf(fp,"%lf\t",x[i]);
}
printf("\n");
if(agaus(a,b,4)!
=0)/*调用高斯法求各杆角速度,存放在b[0]~~b[3]中*/
{
printf("");
for(j=0;j<=3;j++)
{printf("%f",b[j]);
fprintf(fp,"%lf\t",b[j]);}
}
printf("\n");
a[0][0]=l[2]*sin(x[0]);/*第一次赋值,求角速度*/
a[0][1]=-l[3]*sin(x[1]);
a[0][2]=0;
a[0][3]=0;
a[1][0]=l[2]*cos(x[0]);
a[1][1]=-l[3]*cos(x[1]);
a[1][2]=0;
a[1][3]=0;
a[2][0]=l[0]*sin(x[0]-Alpha);
a[2][1]=l[3]*sin(x[1]);
a[2][2]=l[5]*sin(x[2]);
a[2][3]=-l[6]*sin(x[3]);
a[3][0]=l[0]*cos(x[0]-Alpha);
a[3][1]=l[3]*cos(x[1]);
a[3][2]=l[5]*cos(x[2]);
a[3][3]=-l[6]*cos(x[3]);
c[0]=l[3]*cos(x[1])*b[1]*b[1]-l[1]*cos(jiaodu*Angle)*w1*w1-l[2]*cos(x[0])*b[0]*b[0];
c[1]=l[1]*sin(jiaodu*Angle)*w1*w1+l[2]*sin(x[0])*b[0]*b[0]-l[3]*sin(x[1])*b[1]*b[1];
c[2]=-l[3]*cos(x[1])*b[1]*b[1]-l[0]*cos(x[0]-Alpha)*b[0]*b[0]-l[5]*cos(x[2])*b[2]*b[2]+l[6]*cos(x[3])*b[3]*b[3];
c[3]=l[3]*sin(x[1])*b[1]*b[1]+l[0]*sin(x[0]-Alpha)*b[0]*b[0]+l[5]*sin(x[2])*b[2]*b[2]-l[6]*sin(x[3])*b[3]*b[3];
if(agaus(a,c,4)!
=0)/*调用高斯法求各杆角jia速度,存放在b[0]~~b[3]中*/
{
printf("");
for(j=0;j<=3;j++)
{printf("%f",c[j]);
fprintf(fp,"%lf\t",c[j]);}
}
printf("\n");
/*fprintf(fp,"\n");*/
e[0]=l[6]*cos(x[3])-l[5]*cos(x[2])+xg;
e[1]=l[6]*sin(x[3])-l[5]*sin(x[2])+yg;
e[2]=-l[6]*sin(x[3])*b[3]+l[5]*sin(x[2])*b[2];
e[3]=l[6]*cos(x[3])*b[3]-l[5]*cos(x[2])*b[2];
e[4]=-l[6]*cos(x[3])*b[3]*b[3]-l[6]*sin(x[3])*c[3]+l[5]*cos(x[2])*b[2]*b[2]+l[5]*sin(x[2])*c[2];
e[5]=-l[6]*sin(x[3])*b[3]*b[3]+l[6]*cos(x[3])*c[3]+l[5]*sin(x[2])*b[2]*b[2]-l[5]*cos(x[2])*c[2];
printf("E:
X=%fY=%f",e[0],e[1]);
printf("E:
Vx=%fVy=%f\n",e[2],e[3]);
printf("E:
ax=%fay%f",e[4],e[5]);
fprintf(fp,"%lf\t%lf\t",e[0],e[1]);
fprintf(fp,"%lf\t%lf\t",e[2],e[3]);
fprintf(fp,"%lf\t%lf\t",e[4],e[5]);
xx[0]=sqrt(e[2]*e[2]+e[3]*e[3]);/*E点的速度绝对值*/
fprintf(pf,"%ld\t",jiaodu);
fprintf(pf,"%lf\t",xx[0]);
xx[1]=sqrt(e[4]*e[4]+e[5]*e[5]);/*E点的加速度绝对值*/
fprintf(pf,"%lf\t",xx[1]);
fprintf(pf,"\n");
printf("\n");
printf("\n");
/*fprintf(fp,"\n");*/
fprintf(fp,"\n");
}
}
voiddnetnf(x,y,n)
intn;
doublex[],y[];
{
y[0]=l[2]*cos(x[0])-l[3]*cos(x[1])+l[1]*cos(m*10*Angle)-l[4];
y[1]=l[2]*sin(x[0])-l[3]*sin(x[1])+l[1]*sin(m*10*Angle);
y[2]=l[3]*cos(x[1])+l[0]*cos(x[0]-Alpha)+l[5]*cos(x[2])-l[6]*cos(x[3])+l[4]-xg;
y[3]=l[3]*sin(x[1])+l[0]*sin(x[0]-Alpha)+l[5]*sin(x[2])-l[6]*sin(x[3])-yg;
n=n;
return;
}
4、曲线图:
E点的位移图:
E点的速度图:
E点速度与原动件角位移关系
E点的加速度图:
E点加速度与原动件角位移关系图:
 升级会员
升级会员 