完整word版机器人触觉传感器行业分析.docx
《完整word版机器人触觉传感器行业分析.docx》由会员分享,可在线阅读,更多相关《完整word版机器人触觉传感器行业分析.docx(7页珍藏版)》请在冰豆网上搜索。
完整word版机器人触觉传感器行业分析
机器人触觉传感器行业
传感器作为一种检测装置,通过接收被测量的信息,按一定规律变换成电信号或其他方式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
传感器的特点包括:
微型化、数字化、智能化、多功能化、系统化、网络化;它是实现自动检测和自动控制的首要环节。
因为传感器的存在,让物体有了触觉、味觉和嗅觉等器官。
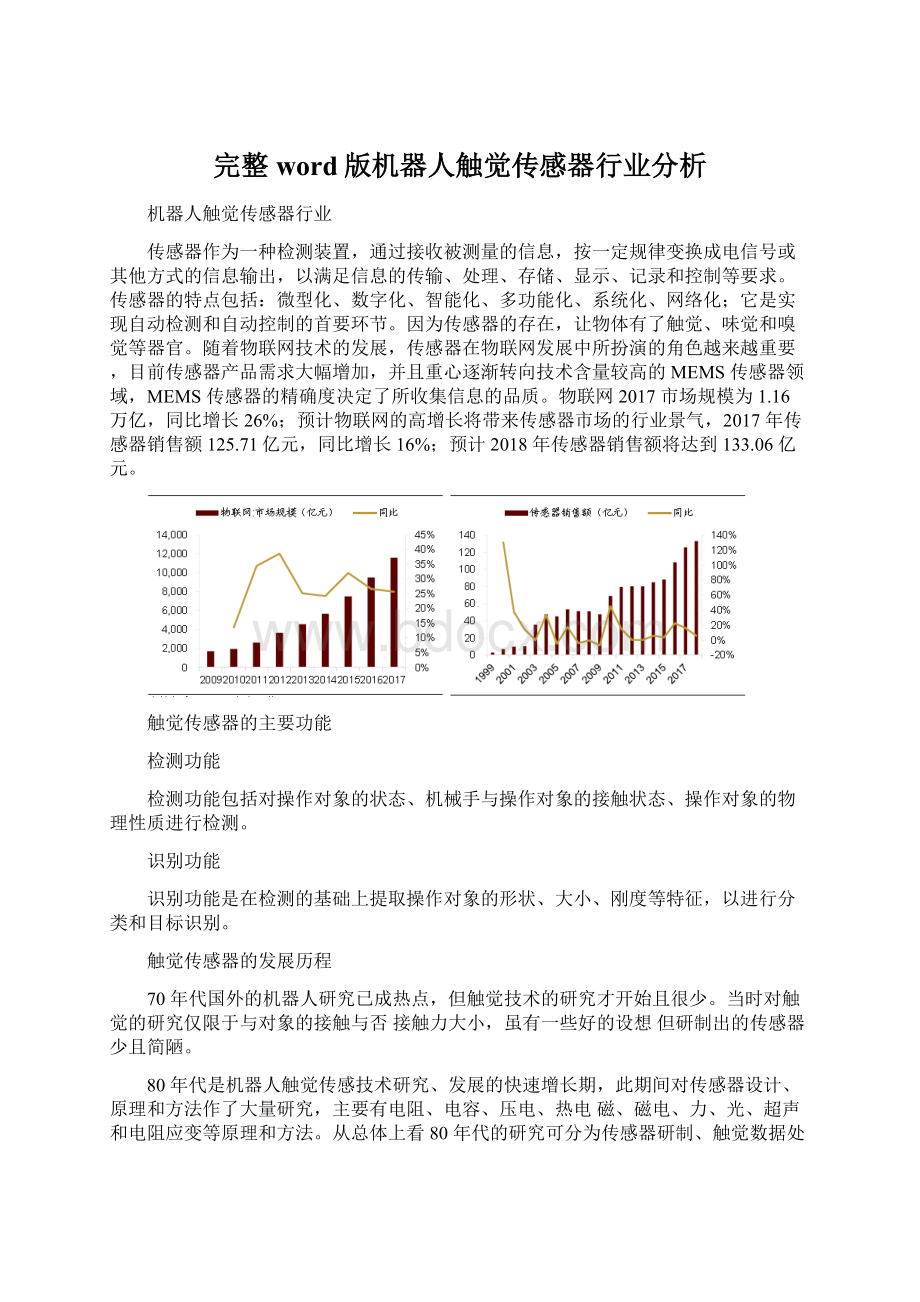
随着物联网技术的发展,传感器在物联网发展中所扮演的角色越来越重要,目前传感器产品需求大幅增加,并且重心逐渐转向技术含量较高的MEMS传感器领域,MEMS传感器的精确度决定了所收集信息的品质。
物联网2017市场规模为1.16万亿,同比增长26%;预计物联网的高增长将带来传感器市场的行业景气,2017年传感器销售额125.71亿元,同比增长16%;预计2018年传感器销售额将达到133.06亿元。
触觉传感器的主要功能
检测功能
检测功能包括对操作对象的状态、机械手与操作对象的接触状态、操作对象的物理性质进行检测。
识别功能
识别功能是在检测的基础上提取操作对象的形状、大小、刚度等特征,以进行分类和目标识别。
触觉传感器的发展历程
70年代国外的机器人研究已成热点,但触觉技术的研究才开始且很少。
当时对触觉的研究仅限于与对象的接触与否接触力大小,虽有一些好的设想但研制出的传感器少且简陋。
80年代是机器人触觉传感技术研究、发展的快速增长期,此期间对传感器设计、原理和方法作了大量研究,主要有电阻、电容、压电、热电磁、磁电、力、光、超声和电阻应变等原理和方法。
从总体上看80年代的研究可分为传感器研制、触觉数据处理、主动触觉感知三部分,其突出特点是以传感器装置研究为中心主要面向工业自动化。
90年代对触觉传感技术的研究继续保持增长并多方向发展。
按宽的分类法,有关触觉研究的文献可分为:
传感技术与传感器设计、触觉图像处理、形状辨识、主动触觉感知、结构与集成。
2002年,美国科研人员在内窥镜手术的导管顶部安装触觉传感器,可检测疾病组织的刚度,根据组织柔软度施加合适的力度,保证手术操作的安全。
2008年,日本KazutoTakashima等人设计了压电三维力触觉传感器,将其安装在机器人灵巧手指端,并建立了肝脏模拟界面,外科医生可以通过对机器人灵巧手的控制,感受肝脏病变部位的信息,进行封闭式手术。
2009年,德国菲劳恩霍夫制造技术和应用材料研究院的马库斯-梅瓦尔研制出新型触觉系统的章鱼水下机器人,可精确地感知障碍物状况,可以自动完成海底环境的勘测工作。
触觉传感器分类
机器人感知能力的技术研究中,触觉类传感器极其重要。
触觉类的传感器研究有广义和狭义之分。
广义的触觉包括触觉、压觉、力觉、滑觉、冷热觉等。
狭义的触觉包括机械手与对象接触面上的力感觉。
从功能的角度分类,触觉传感器大致可分为接触觉传感器、力-力矩觉传感器、压觉传感器和滑觉传感器等。
压阻式机器人触觉传感器
压阻式触觉传感器是利用弹性体材料的电阻率随压力大小的变化而变化的性质制成,并把接触面上的压力信号变为电信号。
1981年,研究人员在金属电极间夹入碳纤维和碳毡,构成压阻传感器;1999年,中国科学院使用力敏电阻制作了能检测三维接触力信息的阵列式触觉传感器;2007年,台湾国立大学利用高分子压阻复合膜设计研制了传感范围和灵敏度可调整的三轴触觉传感器。
该三轴触觉传感器由四个传感悬臂梁及粘贴在各悬臂梁表面和侧面的高分子压阻复合薄膜组成。
光传感式机器人触觉传感器
南京航空航天大学设计的基于光波导原理的能检测三向力的触觉传感器。
触觉传感系统由力敏硅橡胶圆柱触头、圆锥触头组成,且圆柱触头与橡胶垫另一侧的圆锥触头一一对应。
新型光电敏感器件PSD,不仅可以检测三向力,也可以确定受力位置信息。
并且触觉传感器与视觉传感器的输出兼容,适用于机器人实时力控制和主动触觉系统。
电容效应式机器人触觉传感器
电容式触觉传感器原理是:
在外力作用下使两极板间的相对位置发生变化,从而导致电容变化,通过检测电容变化量来获取受力信息。
2008年,上海微系统与信息技术研究所传感技术国家重点实验室研制的柔性电容式触觉传感器可测量任意形状物体表面的接触力。
磁导式机器人触觉传感器
磁导式触觉传感器在外力作用下磁场发生变化,并把磁场的变化通过磁路系统转换为电信号,从而感受接触面上的压力信息。
哈尔滨工业大学机器人研究所设计的基于磁敏Z元件的触觉传感器,其中磁敏Z元件能够输出随磁场强度成比例变化的模拟电压信号,灵敏度很高,工作条件要求很低,只要提供有变化的磁场就可以工作。
采用平板磁铁在空气中的磁场强度衰减作为Z元件的敏感源,通过测量弹性装置把力转换为Z元件与磁铁之间的距离,而Z元件与磁铁之间的距离与磁场强度的变化是对应的,这样,通过把磁场强度参数转换为位移参数,再转换为力的参数,从而达到测力的目的。
磁导式触觉传感器具有灵敏度高,体积小的优点,但与其它类型的机器人触觉传感器相比实用性较差。
压电式机器人触觉传感器
压电转换元件是典型的力敏元件,具有自发电荷可逆的重要特性,而且具有体积小、质量轻、结构简单、工作可靠、固有频率高、灵敏度和信噪比高、性能稳定等优点。
2004年,重庆大学设计了利用压电敏感材料检测三向力的触觉传感器。
传感头部分主要由基座、盖子、传感器内芯、调节机构等组成。
传感头的内芯部分,主要由五个完全相同的压电元件、一个正方体硬质合金、一段圆柱硬质合金、一段铜柱构成。
接触觉传感器
接触觉传感器用以判断机器人是否接触到外界物体或测量被接触物体的特征的传感器,主要有以下几种类型。
微动开关式:
由弹簧和触头构成。
触头接触外界物体后离开基板,造成信号通路断开,从而测到与外界物体的接触。
导电橡胶式:
它以导电橡胶为敏感元件。
当触头接触外界物体受压后,压迫导电橡胶,使它的电阻发生改变,从而使流经导电橡胶的电流发生变化。
含碳海绵式:
它在基板上装有海绵构成的弹性体,在海绵中按阵列布以含碳海绵。
接触物体受压后,含碳海绵的电阻减小,测量流经含碳海绵电流的大小,可确定受压程度。
碳素纤维式:
以碳素纤维为上表层,下表层为基板,中间装以氨基甲酸酯和金属电极。
接触外界物体时碳素纤维受压与电极接触导电。
气动复位式:
它有柔性绝缘表面,受压时变形,脱离接触时则由压缩空气作为复位的动力。
与外界物体接触时其内部的弹性圆泡(铍铜箔)与下部触点接触而导电。
力-力矩觉传感器
用于测量机器人自身或与外界相互作用而产生的力或力矩的传感器。
它通常装在机器人各关节处。
刚体在空间的运动可以用6个坐标来描述,例如用表示刚体质心位置的三个直角坐标和分别绕三个直角坐标轴旋转的角度坐标来描述。
可以用多种结构的弹性敏感元件来敏感机器人关节所受的6个自由度的力或力矩,再由粘贴其上的应变片(见半导体应变计、电阻应变计)将力或力矩的各个分量转换为相应的电信号。
常用弹性敏感元件的形式有十字交叉式、三根竖立弹性梁式和八根弹性梁的横竖混合结构等。
在每根梁的内侧粘贴张力测量应变片,外侧粘贴剪切力测量应变片,从而构成6个自由度的力和力矩分量输出。
压觉传感器
测量接触外界物体时所受压力和压力分布的传感器。
它有助于机器人对接触对象的几何形状和硬度的识别。
压觉传感器的敏感元件可由各类压敏材料制成,常用的有压敏导电橡胶、由碳纤维烧结而成的丝状碳素纤维片和绳状导电橡胶的排列面等。
如图是以压敏导电橡胶为基本材料的压觉传感器。
在导电橡胶上面附有柔性保护层,下部装有玻璃纤维保护环和金属电极。
在外压力作用下,导电橡胶电阻发生变化,使基底电极电流相应变化,从而检测出与压力成一定关系的电信号及压力分布情况。
通过改变导电橡胶的渗入成分可控制电阻的大小。
例如渗入石墨可加大电阻,渗碳、渗镍可减小电阻。
通过合理选材和加工可制成高密度分布式压觉传感器。
这种传感器可以测量细微的压力分布及其变化,故有人称之为“人工皮肤”。
滑觉传感器
用于判断和测量机器人抓握或搬运物体时物体所产生的滑移。
它实际上是一种位移传感器。
两电极交替盘绕成螺旋结构,放置在环氧树脂玻璃或柔软纸板基底上,力敏导电橡胶安装在电极的正上方。
在滑觉传感器工作过程中,通过检测正负电极间的电压信号并通过ADC将其转换成数字信号,采用DSP芯片进行数字信号处理并输出结果,判定物体是否产生滑动。
目前触觉传感器主要应用:
触觉传感器在假肢中的应用
假肢可以奇迹般地恢复一些截肢者失去的功能,但它们至今尚无法完成一件事,那就是恢复准确的触觉。
如今,研究人员报告说,在不远的将来,这些人造的手臂和腿脚有可能获得接近真实的触觉。
利用一种两层的柔韧薄塑料,科学家研制出一种新的电子传感器,能够模拟人体皮肤中触觉传感器的神经信息而向小鼠脑组织传送信号。
当人体中的机械性感受器感受到压力后,它们会发送一股神经脉冲;压力越大,脉冲频率越高。
而之前的触觉传感器在更大的压力下会产生更强的电信号,而不是高频脉冲流。
电信号必须被发送到另一个处理芯片,该处理芯片将信号的强度转换成一个数字脉冲流,然后才被发送到周围神经或脑组织中去。
触觉传感器在工业制造中的应用
如今大热的工业互联网中重要的角色就是工业机器人。
著名汽车制造商比如特斯拉、宝马等等的车间几乎见不到一个人,全靠工业机器人实现组装、喷漆、检测等工作。
今年富士康在国内引进数千机器人取代工人更是证明了未来制造业采用工业机器人是大势所趋。
力传感器赋予机器人的手腕触觉。
力传感器安装在机器人和它操作的机台之间,这样两者间的所有力都能被机器人和机台感知和监控。
触觉传感器在可穿戴电子产品中的应用
近年来,便携式智能电子产品发展日新月异,出现了众多多功能的可穿戴器件。
将电子产品用于手镯、眼镜和鞋子等随身穿戴品一样“穿戴”在身上已然成为一种新时尚。
其中,穿戴式触觉传感器是当下科技圈最前沿的领域之一,可模仿人与外界环境直接接触时的触觉功能,主要包括对力信号、热信号和湿信号的探测,是物联网的神经末梢和辅助人类全面感知自然及自己的核心元件。
国内触觉传感器现状
国内对触觉传感器的发展早有布局,但目前仅限于实验室阶段。
与国外相比,国内触觉传感器的发展仍有较大差距,目前国内市场中消费的绝大多数的触觉传感器均来自于欧美日韩等地区。
国内市场市场和科研进展缓慢,主要集中于以下几个方面。
生产商制造工艺欠缺。
目前国内有100多家企业进行传感器的生产,但是国内传感器企业大多从事生产气体、温度等类型。
触觉传感器最重要的要求就是精确,而这一要求将我国触觉传感器的发展拒之门外。
我国大部分关键零件依赖国外进口,主要原因是在于其缺乏稳定性和一致性,因此进一步阻碍触觉传感器的发展,形成了依赖进口、内生乏力的恶性循环。
制作材料纯度欠缺。
除了生产工艺之外,制备材料也是制约行业发展的重要因素。
石墨烯作为未来触觉传感器柔性发展的重要材料,目前只达到生产的标准,而尚未达到可以制作传感器的标准。
因为材料纯度不够,将会影响电流传递,进而影响传感器的稳定性和灵敏度。
技术复杂,扩大发展鸿沟。
日本在触觉传感器产业化方面较为领先,而其他国家大多处于实验室阶段。
国产产品由于技术鸿沟将长期处于落后:
一片巴掌大小的日本阵列式传感器售价10万元,并能保持严格的均一、稳定性;而国内产品多为一点式的,售价100元左右。
但是其中的品质相差巨大。
 升级会员
升级会员 