课后习题答案.docx
《课后习题答案.docx》由会员分享,可在线阅读,更多相关《课后习题答案.docx(17页珍藏版)》请在冰豆网上搜索。
课后习题答案
3.坐标系{B}的位置变化如下:
初始时,坐标系{A}与{B}重合,让坐标系{B}绕ZB轴旋转二角;然后再绕XB旋转••角。
给出把对矢量BP的描述变为对AP描述的旋转矩阵。
解:
幕坐标系{B}相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
.对AP描述有AP=BTBP;
其中AT=ROt(z,RROt(X,)。
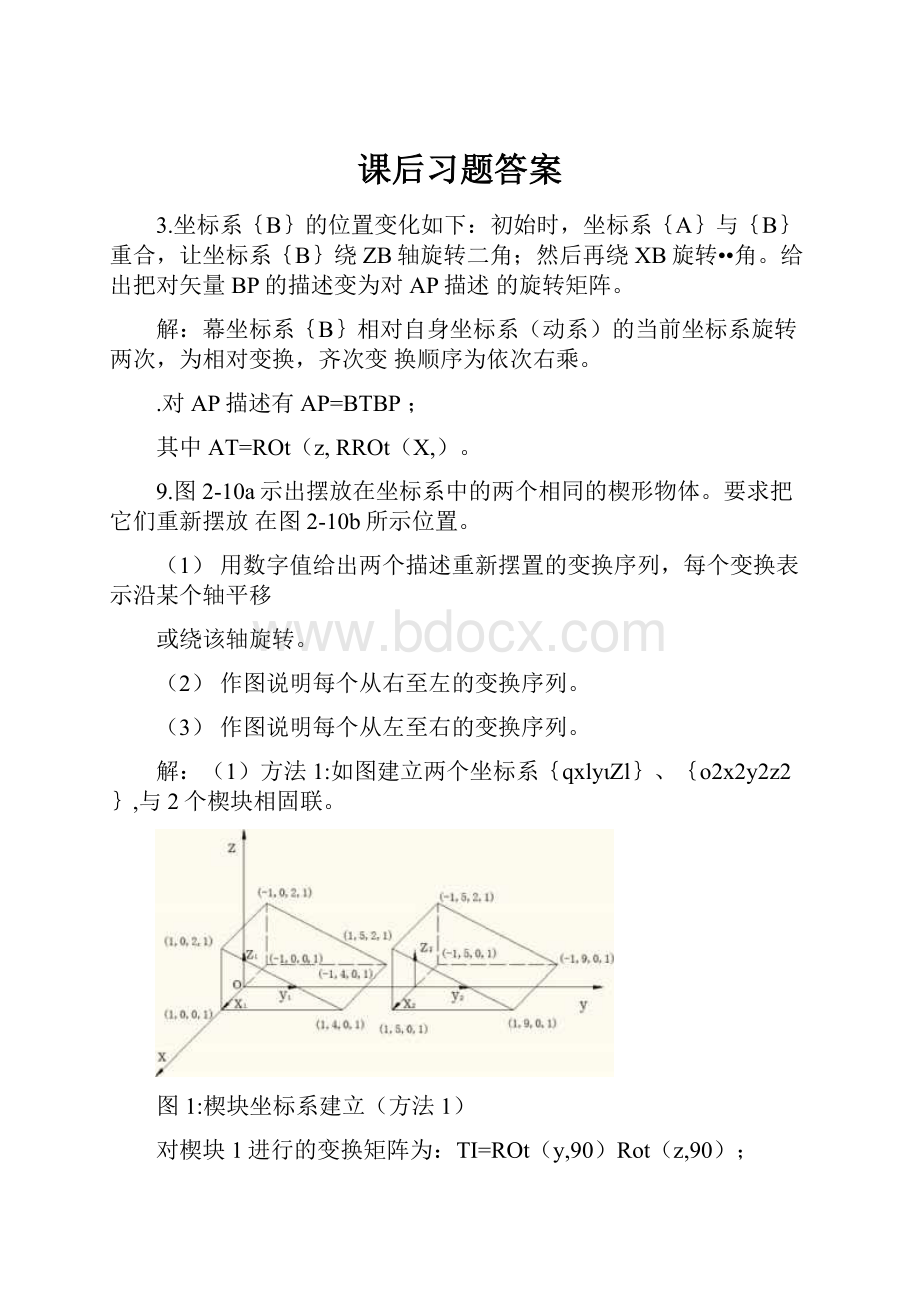
9.图2-10a示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移
或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:
(1)方法1:
如图建立两个坐标系{qxlyιZl}、{o2x2y2z2},与2个楔块相固联。
图1:
楔块坐标系建立(方法1)
对楔块1进行的变换矩阵为:
TI=ROt(y,90)Rot(z,90);
对楔块2进行的变换矩阵为:
T2=Trans(-3,0,4)Rot(乙-9Oo)0TROt(X,90o)Rot(z,180o);
1000
卄O0105
|0010
.0001_
0
0
1
01
0
0
-1
21
1
0
0
0
1
0
0
0
所以:
T1=
;T2:
=
0
1
0
0
0
-1
0
4
0
0
1
0
0
1
方法2:
如图建立两个坐标系{o1x1y1z1}、{o2x2y2z2}与参考坐标系重合,两坐标系
对楔块1进行的变换矩阵为:
T1=Rot(y,90)Rot(z,90);
对楔块2进行的变换矩阵为:
T2=Trans(-2,0,9)Trans(4,0,0)Rot(y,90o)Rot(x,180o)Rot(z^90o);
-
0
0
1
01
(
0
0
_1
2〕
所以:
T1=
1
0
0
0
;T2=
1
0
0
0
0
1
0
0
0
_1
0
9
0
0
0
1一
II
P
0
0
1一
备注:
当建立的相对坐标系位置不同时,到达理想位置的变换矩阵不同。
(2)、(3)略。
2.图3-11给出一个3自由度机械手的机构。
轴1和轴2垂直。
试求其运动方程式。
解:
方法1建模:
如图3建立各连杆的坐标系。
图3:
机械手的坐标系建立
根据所建坐标系得到机械手的连杆参数,见表1。
表1:
机械手的连杆参数
连杆
a
di
θi
1
90o
Li
0
日1
2
0
L2
0
日2
3
0
0
0
θ3
该3自由度机械手的变换矩阵:
0T3=AIAA3;
方法二进行建模:
坐标系的建立如图4所示。
七日1
0
s⅛∣
L1C^1=
-C日2
-ST2
0
L2CT2"
A=
SJ1
0-
-c∈∣1
L1SJ1
;耳=
S∈∣2
c∈∣2
0
LqS日2
0
1
0
0
0
0
1
0
0
0
0
1一
II
0
0
0
1一
Cθ3
-sΘ
30
01
A..
S^3
C日3
0
0
A3_
0
0
1
0
;
0
0
1_
根据所建坐标系得到机械手的连杆参数,见表2
表2:
机械手的连杆参数
连杆
^iJL
ai」
di
日i
1
0
0
0
日1
2
90o
L1
0
日2
3
0
L2
0
日3
-
Cq
Sq
-sd
Cd
0
0
01
0
Cθ2
0
-S^2
0
0
-1
Lj
0
A—
A_厂2—
0
0
1
0
S^2
C^2
0
0
0
0
0
1
0
0
0
1
C&3
-s日3
0
L2I
A..
S氏
曲
0
0
AA3_
0
0
1
0
;
_0
0
0
1
001
平行。
图中所示关节均处于零位。
各关节转角的正向均由箭头示出。
指定本机
械手各连杆的坐标系,然后求各变换矩阵0T∣,1T2和2T3
解:
对于末端执行器而言,因为单独指定了末端执行器的坐标系,则要确定末端执行器与最后一个坐标系之间的变换关系。
方法1建模:
按照方法1进行各连杆的坐标系建立,建立方法见图5。
图5:
机械手的坐标系建立
连杆3的坐标系与末端执行器的坐标系相重合。
机械手的D-H参数值见表3
表3:
机械手的连杆参数
连杆
8
a
di
θi
1
90o
O
Li+L2
θi
2
O
L3
O
θ2
3
O
L4
O
θ3
末端执行器
O
O
O
日4
注:
关节变量O
将表3中的参数带入得到各变换矩阵分别为:
O
O
O
1
"1
O
O
L3
O
_1
O
1
O
1
O
O
;1T2
—
1
O
Li
+L
2
O
O
1
O
O
O
1
-
O
O
O
1
■i
O
O
L4〕
-
1
O
O
Ol
O
1
O
O
3
O
1
O
O
T末
=
O
O
1
O
O
O
1
O
O
O
O
1一
-
P
O
O
1一
j
0
0
O
2T3二
方法2建模:
按照方法2进行各连杆的坐标系建立,建立方法见图6
图6:
机械手的坐标系建立
3自由度机械手的D-H参数值见表4。
表4:
机械手的连杆参数
连杆
αiΛ
ai」
di
Ti
1
0
O
L1+L2
θι
2
90o
O
O
θ2
3
O
L3
O
θ3
末端执行器
O
L4
O
日4
注:
关节变量弓-J4=O。
将表4中的参数带入得到各变换矩阵分别为:
刁
O
O
O1
■1
O
O
Ol
O
1
O
O
1T—
O
O
_1
O
O
O
1
Li壮2
;l2一
O
1
O
O;
P
O
O
1一
II
P
O
O
1一
■1
0
0
L3〕
j
0
0
L4I
0
1
0
0
;3T末=
0
1
0
0
0
0
1
0
0
0
1
0
0
0
1_
I(
0
0
0
1一
2T3=
0.1,0.2和0。
(1)求相应的微分变换;
(2)求对应于坐标系{C}的等效微分平移与旋转。
解:
(1)对基座标系的微分平移:
d=[0.5,0,1]t
对基座标系的微分旋转:
:
=[0.1,0.2,0]t;
迢X=n石=0;eBy=≡o石=0.1;e6=a话=0.2
对应于坐标系{C}的等效微分平移:
ed=[0.5;0.5;0];微分旋转:
e=[0;0.1;0.2]。
2.试求图3.11所示的三自由度机械手的雅可比矩阵,所用坐标系位于夹手末端上,其姿态与第三关节的姿态一样。
解:
设第3个连杆长度为L3
1)使用方法1建模,末端执行器的坐标系与连杆3的坐标系重合,使用微分变换法。
图7:
机械手的坐标系建立
表5:
D-H参数表
连杆
αi
Q
di
θi
1
90o
L1
0
θ1
2
0
L2
0
θ2
3
0
L3
0
θ3
末端执行器
0
0
0
0
-
Cθ3
-st⅛3
0
L3C日3
T末=
曲
0
L3S日3
;3‰=末T末=E;
0
0
1
0
0
0
0
1_
由上式求得在末端执行器坐标系{末}下的雅可比矩阵:
L2S日3
0
0
0
L2C日3中L3
L3
0
0
末■
0
0
0
0
末J=
0
0
0
0
0
0
0
0
I
1
1
1
1
因为末端执行器的坐标系位姿与第三关节的姿态一样,所以{末}与{3}的关
■■■士
节变量q=qq=O,真正作用的关节变量为R、二2、二3,所以在J中第四列对计算结果无影响,可去掉。
2)使用方法2建模,使用微分变换法。
图8:
机械手的坐标系建立
表6:
D-H参数表
连杆Oti-1a*diθi
1
0
0
0
日1
2
90o
L1
0
日2
3
0
L2
0
日3
末端执行器
0
L3
0
0
0T末
由上式求得在末端执行器坐标系
Cθ3
-S日3
0
Lj
0
0
L3I
S日3
C日3
0
L3S6
;3T末=
0
1
0
0
0
0
1
0
0
0
1
0
「°
0
0
1_
II
0
0
0
1一
2T末
末
T末=E;
-
0
L2^3
0
01
0
L2CE+L3
L3
0
末■
-L^-L?
C日2
—L3C(&2+&3)
0
0
0
J=
S(^2
+θ3)
0
0
0
C^2
+日3)
0
0
0
I
0
1
1
1
{末}下的雅可比矩阵:
{末}与{3}的关
因为末端执行器的坐标系位姿与第三关节的姿态一样,所以
VW-H
节变量q=qq三0,真正作用的关节变量为弓、二2、二3,所以在J中第四列对
计算结果无影响,可去掉
 升级会员
升级会员 