基于单片机的水箱控制系统.docx
《基于单片机的水箱控制系统.docx》由会员分享,可在线阅读,更多相关《基于单片机的水箱控制系统.docx(12页珍藏版)》请在冰豆网上搜索。
基于单片机的水箱控制系统
一水箱控制系统的模型分析与设计
1.系统的模型分析
系统由以下几个部件组成:
储水箱,潜水泵,变频器,控制器,出水管。
系统有一个出水通道,一个输水通道。
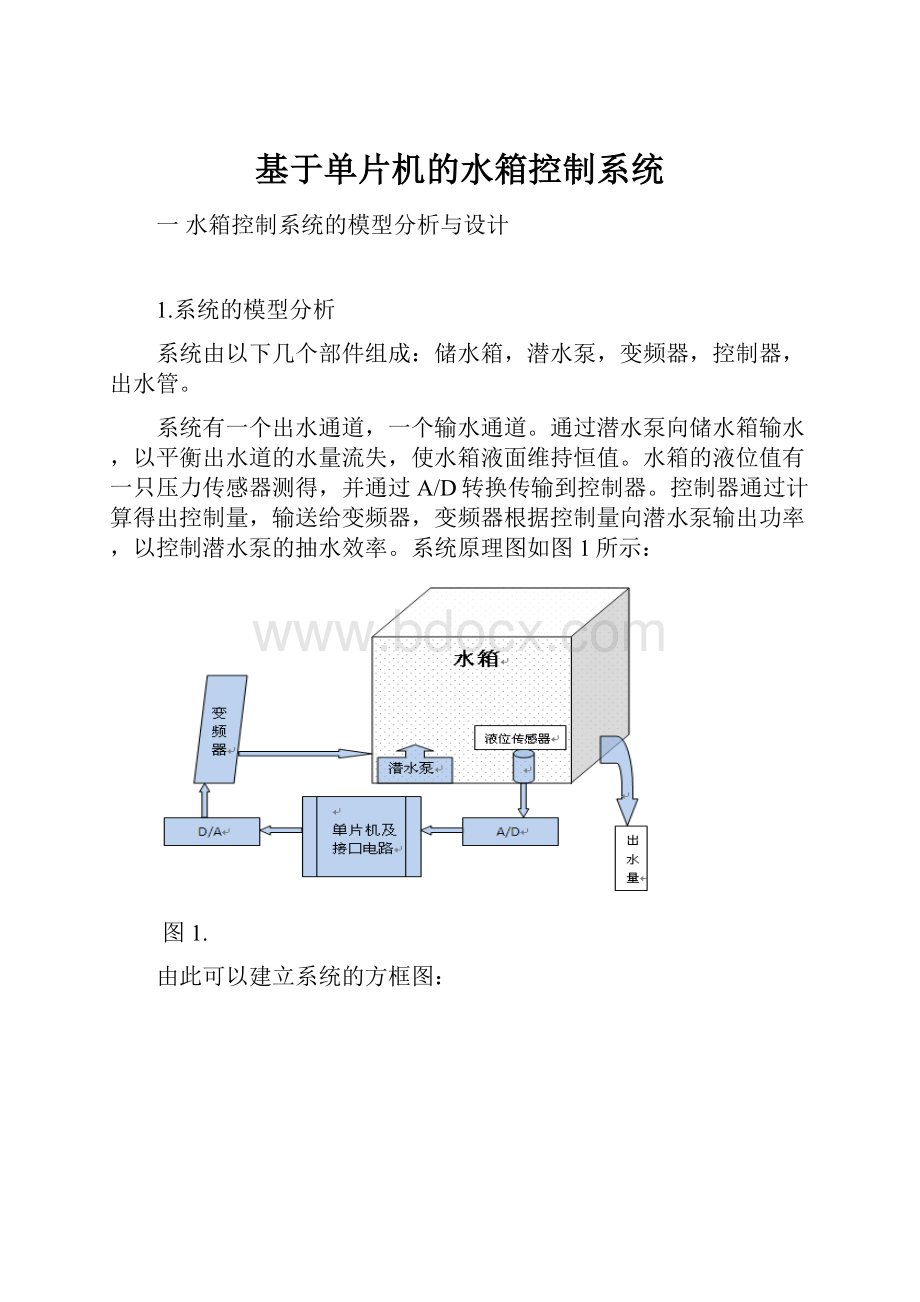
通过潜水泵向储水箱输水,以平衡出水道的水量流失,使水箱液面维持恒值。
水箱的液位值有一只压力传感器测得,并通过A/D转换传输到控制器。
控制器通过计算得出控制量,输送给变频器,变频器根据控制量向潜水泵输出功率,以控制潜水泵的抽水效率。
系统原理图如图1所示:
图1.
由此可以建立系统的方框图:
控制对象:
水箱液位
操纵变量:
输水流量Q1
扰动量:
出水量Q2
控制器:
C51单片机
执行机构:
潜水泵(变频器)
f
二.主控制器硬件设计
1.概述
主控制器包括以下模块:
中央处理器,A/D转换器,D/A转换器,串口通信电路,数字显示器,键盘,蜂鸣警告器。
使用ALTIUMDESIGNER8.0软件,设计集成电路板,将上述模块集成到一块小型的电路板上。
2.中央处理器——AT89C55单片机
因为系统是一个液位控制系统,控制精度并不要求十分高(控制在毫米级即可),控制速度不要求十分快。
因此考虑到性能及成本问题,选用atmel公司的AT89C55单片机。
AT89C55单片机的性能参数为:
DIP40封装,32个I/0口(P0_0~P3_7),8个中断源,3个计时/计数器,256字节RAM,20字节ROM,时钟频率,12MHz。
处理器接线如图8所示:
图8
处理器有8个空余管脚暂未使用,以后可根据需要作功能扩展。
3.模/数转换器——ADC0804
要对水箱液位进行控制,首先要将水箱的即时数据采集给中央处理器。
通过置于水箱中的压力传感器将水箱液位转换为电信号(0~5V电压信号或4~20mA电流信号),传输到模/数转换器,通过转换,将电信号模拟量变为数字量,供中央处理器处理。
在这里采用NSC公司的ADC0804作为模/数转换器。
ADC9804接受典型的传感器输入电信号,8位数据并行输出。
它的处理速度为100μs,无论从速度还是精度(8位)都已经可以满足要求。
ADC0804接线如图9所示:
图9
这里为了节约I/O口,采用了数据并入串出的方式,通过移位寄存器74164将转换得的数字量逐位输入给中央处理器。
这样虽然使得处理速度降低,但由于液位控制只需间隔一定时间对水箱液位进行数据采样即可,而采样周期一般远大于处理周期,因此,实际上并不会降低数据的处理效率。
4.数/模转换器——DAC0832
数/模转换是模/数转换的逆过程。
中央处理器通过将当前的液位值与给定值比较,得出误差,再通过一定的控制算法处理误差,得出控制量。
这时的控制量是数字量,必须转换成模拟量,才能传输到变频器的模拟量输入端子。
在这里采用NSC公司的DAC0831作为数/模转换器,接线图如图10所示:
图10.
若不加接电路,输出的是电流信号。
如果需要输出电压信号,则要加接电路图如下图11:
图11
这样,通过运算放大器以及反馈电阻的组合,可以将电流输出转为电压输出。
同理,为了节约I/O口,采用了数据串入并处的方式。
5.输入键盘
由于系统没有转门的给定值模块,所以给定值储存于中央处理器中。
因此若要改变给定值,就必须要有输入装置。
这里采用3X4矩阵键盘。
原理图如图12所示:
图12
键盘实物图如图13所示:
图13
有4个空余键可由使用者通过修改中央处理器内部程序自定义。
6.显示器——4X8段数码管
为了方便使用者实时了解液位值及中央处理器内部信息,这里设置了一组有四个八段数码管组成的显示器。
为了节省I/O口,这里同样采用了数据串入并处及数码管动态扫描显示的方式。
接线如图14所示:
图13
7.蜂鸣警告器
实际应用中有可能出现这样的情况:
由于使用者的控制算法设计不当(积分时间常数太大,或者开环增益太大,造成很大超调量,或者算法中没有积分环节切除设置,导致积分饱和),使得液位超过上限,或低于下限,这时需要系统及时发出警告。
这里使用简单的蜂鸣器即可。
接线如图14所示:
图14
其中BEEP信号有中央处理器P2.0给出。
高电平时三极管导通,蜂鸣器响。
反之不响。
8.直接串口通信——RS232
为了使得系统可以与其他机器进行信息交流(单片机与单片机之间),这里设置一个RS232芯片为核心的串口通信接口。
接线如图15所示:
图15
9.USB转串口——PL2303。
中央处理器的程序要根据实际情况和使用者需要随时修改。
程序从通用的PC机下载到中央处理器中。
这里用的接口便是以PL2303为核心的电路。
如图16所示:
图16
10.电源接口
考虑到电源提供能更廉价和方便,这里使用220v,50Hz的工频电源。
但是如果在控制器集成版中内置变压器,变压器的强磁场对把板子内各块芯片的信号可能产生较大干扰,所以这里不采用位置的变压器,先将220v的交流电转成24v的直流电,再由内置的7805芯片转换成5v电压。
接线如图17所示:
图17
11.电路板原理图和PCB图
电路板原理图和PCB图如图18,图19所示:
图18
图19
 升级会员
升级会员 