乐高机器人教案.docx
《乐高机器人教案.docx》由会员分享,可在线阅读,更多相关《乐高机器人教案.docx(14页珍藏版)》请在冰豆网上搜索。
乐高机器人教案
乐高机器人—齿轮篇教案
在机器人的设计中,机械结构是完善系统的一个重要因素。
要认识各种各样的传动机构,了解其工作原理及其优缺点,什么时候用哪种传动系统最有效等,从而设计出出色的机器人系统。
2.1简介
齿轮是机器中很重要的部件,它几乎是机器的象征。
探索齿轮的一种非常有用的特性:
将一种力魔法般的转换成另外一种力。
介绍一些新的概念——速度、力、扭矩、摩擦力;还有一些简单的机械理论基础。
认识齿轮和简单杠杆之间的相似点。
2.2齿数的计算
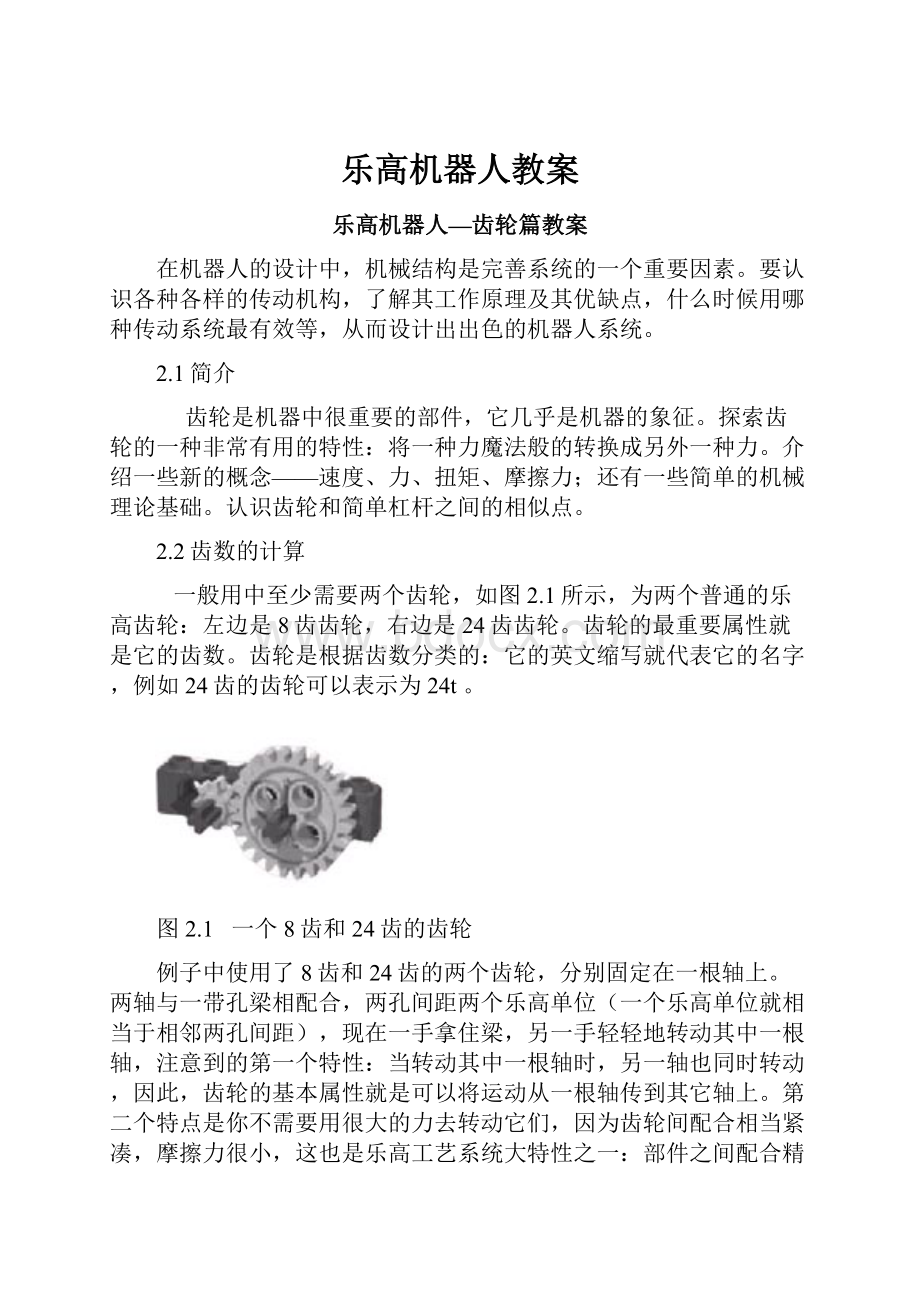
一般用中至少需要两个齿轮,如图2.1所示,为两个普通的乐高齿轮:
左边是8齿齿轮,右边是24齿齿轮。
齿轮的最重要属性就是它的齿数。
齿轮是根据齿数分类的:
它的英文缩写就代表它的名字,例如24齿的齿轮可以表示为24t。
图2.1 一个8齿和24齿的齿轮
例子中使用了8齿和24齿的两个齿轮,分别固定在一根轴上。
两轴与一带孔梁相配合,两孔间距两个乐高单位(一个乐高单位就相当于相邻两孔间距),现在一手拿住梁,另一手轻轻地转动其中一根轴,注意到的第一个特性:
当转动其中一根轴时,另一轴也同时转动,因此,齿轮的基本属性就是可以将运动从一根轴传到其它轴上。
第二个特点是你不需要用很大的力去转动它们,因为齿轮间配合相当紧凑,摩擦力很小,这也是乐高工艺系统大特性之一:
部件之间配合精度高。
第三个特点是两根轴反向转动:
一个顺时针,一个逆时针。
第四个特点:
也是最重要的特性,就是两根轴的旋转速度不同。
当转动8齿齿轮时,24齿齿轮转动得很慢;而24齿的齿轮转动时,8齿齿轮转动得很快。
2.3加速和减速传动
先转动大齿轮(24齿),它的每一个齿都与8齿的两个齿啮合的很好。
当转动24齿,每一次在齿轮的接触面一个新齿取代前一个齿时,8齿也刚好转过一个齿,因此,大齿轮转过8个齿(24齿的齿轮)就可以让小齿轮转过一圈(360度)。
当大齿轮再转过8个齿时,小齿轮又转了一圈。
在你转动24齿齿轮的最后8个齿时,8齿齿轮转过第三圈。
这也是两轴产生不同速度的原因:
24齿齿轮转动一圈,8齿齿轮转动了三圈!
我们用两个齿轮齿数之比来表示两者的关系:
24比8。
经过简化,得到3:
1。
从数字来看,24齿齿轮1转就相当与8齿齿轮的3转。
由此,我们得到一种加速的方法(从技术角度来将应称为角速度,而不是速度)。
这时候你可能会想到在竞速小车上使用巨大的传动比。
遗憾的是,在力学中有得必有失,获得了速度,同时就减少了扭矩,简单的说,就是在力量上的损失会转化为速度——速度越快,扭矩就越小。
比率也相同:
如果获得了三倍的角速度,你的扭矩会减小到原来的1/3。
齿轮有一个有趣的特性:
扭矩和速度的转换是对称的,你可以将扭矩转换成速度,反之亦然。
当系统增加速度而减小扭矩时,我们称为加速,反之我们称为减速。
什么是扭矩?
当你用扳手转动螺钉上的螺母时,即产生扭矩。
扳手动时,螺母产生抵阻力,你握手柄的地方离螺母越远,你需要施加的力就越小。
实际上,力矩是两个参数的乘积:
距离和力。
增加其中一个量,就可以增加扭矩。
力矩的度量单位就是力的单位和距离的单位,国际单位表示为牛顿米(Nm)或者是牛顿厘米(Ncm)。
如果熟悉杠杆,你会认识到它们之间的相似性。
对于杠杆,合力的大小依赖施力点和支点的距离,距离越大,力就越大。
你可以把齿轮当作杠杆,它的支点就在轴上,施力点在齿轮的齿上,将同样的力施加到更大的齿轮上,扭矩就增加了。
什么时候应当加速或减速传动,经验会告诉你。
总的来说,减速传动用的比加速传动要多,因为马达会产生很高的速度,但扭矩很小。
在多数时候,常减小速度来提高扭矩,让小车能爬上斜坡,或者让机器人的手臂举起物体。
在你不需要大扭矩时,可以减小速度来精确定位。
力学中能量转换是有损耗的。
在上面的例子中,它的损耗是由摩擦力引起的,尽管摩擦力是无法避免的,但我们应尽量减小摩擦力,因为摩擦力在转换过程中会抵消一部分扭矩。
2.4齿轮传动机构
最大的乐高齿轮是40齿的,而最小的是8齿的。
这样,使用两个齿轮传动时,最大可以得到1:
5的传动比。
(如图2.2)
图2.2 1:
5传动比
如果还想得到更高的传动比,应该使用多级变速系统(加速或减速),我们称它为齿轮传动链,如图2.3。
在这个装置中,第一级传动比为3:
1,第二级传动比为3:
1,这样,总的传动比就为9:
1。
图2.39:
1的传动比
齿轮传动链可能会产生让你难以置信的能量,因为它能将扭矩转化为角速度,两个1:
5的传动比产生1:
25的传动比,3个1:
5的传动比产生1:
125的传动比。
但必须小心使用,因为乐高组件可能因为机器人不能产生某种动作而损坏。
换句话说,如果某一样组件卡住了,乐高马达的速度乘上125产生的速度足以扭曲梁,扭断轴或者打破齿轮的齿。
选择合适的传动比
在选择传动比之前先做一些实验,不要等到搭好机器人的时候才发觉传动机构没有正确地工作。
先搭建一个粗糙的模型或者是一个特殊的子模型,调试传动比,直到你满意为止,搭建的模型不需要很牢固,也不需要很完整,关键是能否正确地模拟某一个具体的动作以及能处理实际的载重。
例如,如果你准备搭建一个爬斜坡(50%坡度)的机器人,首先必须计算模型所要承受的所有重量:
执行其它任务的马达、RCX、额外的组件等。
不能无负载测试,否则机器人将无法正常工作。
注意:
记住,在多级减速过程中,每增加一级就会产生更大的摩擦力,因此,如果想得到最大的传动效率,应该尽可能地降低传动级来达到你所需的传动比。
2.5涡轮
在机器人套装中,你会发现另外一种奇怪的黑色齿轮,类似带有螺旋线的圆柱体。
它也是一种齿轮。
在图2.4中,涡轮与常用的24齿齿轮啮合,通过搭建这个简单的装置,可以发现涡轮的很多特点。
用手试着去转动齿轮,你能轻易的转动与涡轮相连接的轴,但不能转动与24齿相连接的的轴。
因此涡轮的第一个重要的属性是:
它能产生单向传动系统。
也就是说,你能用涡轮带动其它齿轮,但不能被其它齿轮带动,产生这个现象的原因又是摩擦力引起的。
这个属性可以用于特殊的用途。
图2.4涡轮装置
你可能也注意到了另外一种情况:
两根轴是正交的,使用涡轮时,传动方向必然会改变。
现在再来回到齿轮:
我们已经很熟悉如何计算普通齿轮的传动比。
你是否想知道涡轮所产生的传动比呢?
先做一个实验:
搭建图2.4中的装置,缓慢转动涡轮轴一圈,同时观察24齿齿轮。
可以观察到涡轮每转过一圈,24齿齿轮刚好转过一个齿,我们得到一个结论:
涡轮是1齿齿轮,我们在装置中使用了一级传动就得到了24:
1的传动比。
使用40齿的齿轮可以将传动比提高到40:
1。
这个不对称的涡轮装置主要应用在减速和增加扭矩,这个特殊的装置的摩擦力极大以至无法被其它齿轮带动。
同样,这么大的摩擦力也会使它的效率大大降低,因为在这过程中会损耗许多扭矩。
这一特殊并不代表它不好。
在某些情况下,我们非常需要这种不对称的装置。
例如,我们设计的机器人用手臂提起物体。
如果使用标准齿轮产生25:
1的传动比:
当手臂提起物体并停止时会发生什么情况呢?
这个对称装置把物体的重量(势能)转变成扭矩,扭矩转变成角速度,马达就自行回转使得手臂回落下来。
在类似这种情况中,就可以使用涡轮来解决这一问题。
涡轮的自锁功能使马达不能回转。
由此当你希望带有负载的装置准确、稳定地定位时,或是想获得一个很高的减速传动比,涡轮会非常有用。
2.6离合齿轮
接下来,介绍另一个特殊组件:
白色的24齿厚齿轮,在它的表面山上有奇怪的斑纹(如图2.5),它的名字叫做离合齿轮,在接下来讨论它是如何工作的。
图2.5离合齿轮
实验很简单:
将轴的一端插入离合齿轮,将另一端插入24齿齿轮用作旋钮。
用手让后者保持适当的位置,缓慢转动离合齿轮,尽管阻力很大,但还是转动了。
这就是它的作用:
当扭矩大于额定值时,将产生打滑来保护结构。
离合齿轮通过限制传动系统中的力来保护马达、组件并解决某些困难的情况。
刻在上面的2.5-5Ncm(Ncm代表牛顿厘米,扭矩的单位)表示这个齿轮可以传输大约2.5-5Ncm的扭矩,超出这个范围,它内部的离合结构就开始打滑。
离合有什么用处呢?
我们知道,在减速传动中系统会产生很大的扭矩,出现意外时,这个力足以毁坏机构,离合齿轮可以避免这种情况的发生:
将传输的力限制到某个值内。
还有一种情况:
齿轮降速很小,且扭矩不足以毁坏乐高组件。
但如果机构卡住,马达停转,这种情况很麻烦,因为这时马达有电流流过,可能会造成马达永久损坏。
离合齿轮避免了这种损坏:
当扭矩变大时,齿轮就脱离马达。
在某些情况下,离合齿轮甚至可以减少传感器的使用。
假设你搭建一个能够完成某些动作的动力装置,比如使某个子机构(手臂、控制杆、传动装置)处于两种状态:
打开或关闭,向右或向左,啮合或脱离啮合,你需要打开马达一定时间,将机构从一种状态变到另一种状态。
但不幸的是,很难精确控制马达执行某个动作的时间(更坏的是,如果负载变化,时间也要随之改变),如果时间太短,系统就会产生中间状态,如果时间太长,马达就有可能损坏。
此时,你可以使用一个传感器来检查装置的状态是否达到;然而,如果你在传动链的某处使用一个离合齿轮,你可以大概设置一个时间,使你的马达转动到最大负载位置时,即使设置时间稍长,离合齿轮打滑,会保护你的机器人和马达。
现在,讨论最后一个问题:
在传动链的哪个地方放入离合齿轮。
我们知道,离合齿轮有24齿且能传递5Ncm的最大扭矩,因此你可以应用学过的齿轮传动比计算方法。
如果你在40齿的齿轮前面放一个离合齿轮,传动比是40:
24,大约是1.67:
1。
最大的扭矩是1.67×5,即8.35Ncm。
图2.6中比较复杂的传动链中,传动比分别是3:
5和1:
3,则总传动比为5:
1,那么最大扭矩是25Ncm;一个有25Ncm扭矩输出的系统能够产生的力是5Ncm所产生力的5倍,换句话说,它能提起一个5倍于它的重物重量。
图2.6传动链中的离合齿轮
从这些例子可以推断出与混合有离合齿轮的传动系统产生的最大的扭矩是由离合齿轮的最大的扭矩乘上它后面传动级的传动比。
当减速时,输出的扭矩越大,在传动链中离合齿轮离动力源就必须越近。
相反的,当你减小角速度时,不是得到扭矩而是想得到更精确的定位,你要把离合齿轮放在传动链的最后一级,这样会让最后的扭矩最小化。
搭建模型是一个很好的学习过程。
搭建一些简单的模型,试验离合齿轮在不同位置时的传动效果。
2.7齿轮的配合
乐高齿轮组件包含许多不同类型的齿轮,前面已介绍了8齿、24齿、40齿的齿轮,现在我们了解其它类型的齿轮,讨论如何根据它们的尺寸和形状来使用。
8齿、24齿、40齿的齿轮的半径分别为0.5、1.5、2.5个乐高单位(从齿心到半齿的距离),当两者配合时,连接两齿轮轴的距离就等于它们半径之和,可以看到这三种齿轮之间配合的距离都是整数倍,这样可以配合得很好。
8齿与24齿齿轮的距离是2个乐高单位,8齿与40齿齿轮的距离是3个乐高单位,24齿与40齿齿轮的距离是4个乐高单位,这种配合很容易与标准栅格结构上的其它组件连接,因为每一层为两个乐高单位(图2.7所示)。
图2.7垂直齿轮配合
另一个普通齿轮是16齿齿轮(如图2.8),它的半径是1个乐高单位,两个这样的齿轮以两个乐高单位的距离可以配合地很好。
但与其它齿轮配合会有一点问题,因为它与其它齿轮的配合距离会产生半个乐高单位,不过有一种特殊的梁(1×1带孔梁,1×2带孔梁)可以解决这个问题(如图2.9)。
图2.8 16齿齿轮
图2.9 16齿齿轮与24齿齿轮的配合
惰轮 讨论一下图2.7所示的惰轮,图中传动链的比率是多少呢?
从8齿齿轮开始,第一级传动比是24:
8,第二级传动比为40:
24,两者相乘,得到40:
8或者5:
1。
8齿齿轮与40齿齿轮直接传动也可得到5:
1的传动比,那么,中间的24齿就是一个惰轮,它不影响传动比。
惰轮在机械中使用非常普遍,它有助于连接远处的轴。
那么,惰轮在系统中是否不起作用呢?
不是的,它们有一个非常重要的作用:
改变输出方向。
标准栅格的使用非常灵活,可以用多种方式解决问题,而不需求助于特殊部件。
如图2.10所示
图2.10 对角线配合
当我们使用一对16齿齿轮时,传动比是1:
1。
对角速度或扭矩都不会有影响(除一小部分被转换摩擦力外),但在某些应用中的确需要使用一对16齿齿轮,例如,当你只需要把运动从一根轴传到另一根轴上时,这也是齿轮常用功能。
还有一种特殊的齿轮,可以把运动从一根轴传到与之垂直的轴上,这种齿轮称为斜齿轮。
齿隙水平配合和垂直配合比对角线配合更精确。
对角线配合时啮合齿轮的两齿的间隙较大,多出的空隙称为齿隙,即一个齿轮在不影响与它的啮合的齿轮的情况下可以承受的震动。
当加速传动时齿隙会变大,减速传动时会减小。
总之,它对系统会产生不良的作用:
减小了输出轴的精度,因此要尽量少用。
齿轮家族中最普通的成员是12齿的斜齿轮,而且只有一种使用方式,如图2.11。
它不能与我们前面讨论过的标准齿轮配合。
但是它有一个非常有用的功能——改变传动方向,战用空间很少。
还有一种与这种齿轮相同设计的20齿伞齿轮(如图2.12)。
这两种斜齿轮的厚度是半个乐高单位,其它的都是1个乐高单位。
图2.11垂直配合的斜齿轮
图2.12 20齿斜齿轮
此外,24齿的齿轮还有一种形状——冠形。
它的前端齿比较特殊,但可以当作标准齿来使用,可以与其它标准齿轮在正交方向传输运动(图2.13)。
简单的介绍一种新齿轮,乐高机器人挑战套装没有这种齿轮,但你在其他套装里可能会找到它:
图2.14所示的双面斜齿轮(12齿和20齿,半径分别为0.75和1,25),它们以两个乐高单位配合。
图2.13垂直配合的冠齿轮
图2.14双面斜齿轮
如果将两种相同的双面斜齿轮配合就有点麻烦,因为距离变成1.5或2.5了。
与其它的齿轮配合就更复杂了,它们配合的距离甚至可能包含1/4或3/4个乐高单位。
这种齿轮更适合垂直安装(如图2.15)。
图2.15垂直配合的双面斜齿轮
2.8滑轮、皮带、链条的使用
在乐高机器人挑战套装中还有一些滑轮、皮带,它们的工作原理与齿轮功能相似,这里说相似,说明还是有区别的。
滑轮还有一些特性,下面我们会介绍到。
乐高机器人挑战套装基本组件中没有链条,如果需要,可单独购买。
链条在机构连接中与齿轮和皮带轮系统有一些共同的特性。
2.8.1滑轮和皮带
滑轮就像在直径端带有凹槽(座圈)的轮子。
LEGOTECHNIC套装中包含了4种滑轮(如图2.16)
图2.16 滑轮
最小的滑轮(a)实际上就是半个轴套,常常用来固定轴,以防止轴前后滑动,因为它也有座圈,也称其为滑轮。
它的半径是1个乐高单位,厚度是半个乐高单位。
(b)中的滑轮厚度为1个乐高单位,宽1.5个乐高单位。
它两面不对称,因此它的凹槽也不在中心位置。
在带有橡皮圈的轴孔的一端可以与微马达连接。
(c)中的滑轮直径是3个乐高单位,厚度也是半个乐高单位。
(d)中大滑轮的直径是4.5个乐高单位,厚度为1个乐高单位。
乐高皮带是类似于橡皮筋的橡胶环,乐高机器人挑战套装中有3种不同颜色(对应不同长度)的皮带:
白色、蓝色、黄色(其他套装里还有另外一种长度的红色皮带),乐高皮带与普通橡胶带(套装里黑色的那种)不同,普通胶带弹性大,不适合用于连接两个滑轮并传递运动。
而乐高皮带是用来连接滑轮的,乐高设计的皮带可以很好的与滑轮的凹槽配合。
我们看一下皮带连接两滑轮的装置(如图2.17)。
皮带将运动从一个滑轮传递到另一个滑轮上,非常类似一对齿轮。
那如何计算它们的传动比呢?
滑轮没有齿,我们通过计算机滑轮的半径比来确定其传动比(这个规则民样适合齿轮传动比的计算,只不过齿轮的圆周上均匀地分布着齿,根据齿数来计算传动比要方便得多)。
计算直径时应从座圈内部开始计算,因为槽壁是为了防止皮带从滑轮上掉下来的,不应算入直径。
图2.17皮带与滑轮连接
由于皮带很容易打滑,因此不适合传递大扭矩。
滑移数量也很难估计,因为它取决于多种因素,包括扭矩和速度、皮带的张力、皮带和滑轮之间的摩擦力、皮带的弹性等。
综合这些因素,我们更需要在给定的条件下用实验方法来测量不同滑轮组合的传动比,如表2.1测试的结果。
半轴套
小滑轮
中滑轮
大滑轮
半轴套
1:
1
1:
2
1:
4
1:
6
小滑轮
1:
2
1:
1
1:
2.5
1:
4.1
中滑轮
4:
1
2.5:
1
1:
1
1:
1.8
大滑轮
6:
1
4.1:
1
1.8:
1
1:
1
计算滑轮之间的传动比
如何判断滑轮之间的传动比呢?
只要用皮带连接两个滑轮,转动其中的一个,带动另一个滑轮,然后比较他们转动的次数。
但用手转动滑轮是相当麻烦、耗时的工作,有可能会数错。
使用RCX就可以完成这项工作,在RCX上安装一个马达和两个角度传感器?
我们先搭建一个简单的装置:
将滑轮连接到马达上,轴上再连接上第一个角度传感器,第二个滑轮放置在近处,轴上连接第二个角度传感器。
尽量减小摩擦力,保持皮带在皮带轮的各部分的张力一样。
启动马达后,RCX开始计算角度。
几秒后停止马达,读取角度传感器的值,将两个值一比就得到了表2.1中的比率了。
在有负载的情况下,这些值就显的重要了。
因为在低扭矩的系统中,可以把这个比率当成传动比。
总之,在减速传动系统中第一级传动往往使用滑轮,这样就提高了角速度,但扭矩降低了。
你可能在很多应用中看到滑轮打滑现象,它所起的作用就是限制扭矩,与我们前面讨论过的离合齿轮的作用是一样的。
滑轮与齿轮相比,还有一个优势,就是配合距离是没有严格的限制。
滑轮可以通过使用长皮带将运动传递到远处的轴上(如图2.18),而且在高速状态下,滑轮传动比齿轮传动产生更低的噪音——有时候这个特性非常有用。
图2.18滑轮长距离传递运动
2.8.2链条
乐高链条有两种:
链节链条和履带式链条(如图2.19),这两种链条采用同一种传动原理,可以拼接成任意长度。
跟皮带连接滑轮类似,链条用于连接齿轮,它们有一些相同点:
两种装置都是连接平行轴,都可以连接间距较大的轴。
最大的区别就是:
链条不会打滑,因此它就不会损失扭矩(链条能传递的最大扭矩是由单个链节的阻力决定的,乐高链节的阻力很小)。
另一点区别是:
链条传动会产生很大的摩擦力,因此比齿轮直接啮合传动效率要低。
在低速情况下使用链条在间隔较远的轴上传递运动非常有效。
链条传动的传动比与齿轮直接啮合传动的传动比是一样的:
图2.19 链条
 升级会员
升级会员 